Linux 串口编程简介和实例学习
Linux 串口编程简介和实例学习
一、无论是从linux官方直接下载的原生态内核还是任何一家芯片厂家提供的linux内核,都已经把串口驱动写好了,所以在linux串口编程中,是完全不需要动手去写串口驱动的。对于一般的程序员来说涉及比较多的是串口应用编程,这里我们就介绍一下如何调用内核提供的接口,如何进行初始化配置以及发送和接收数据。
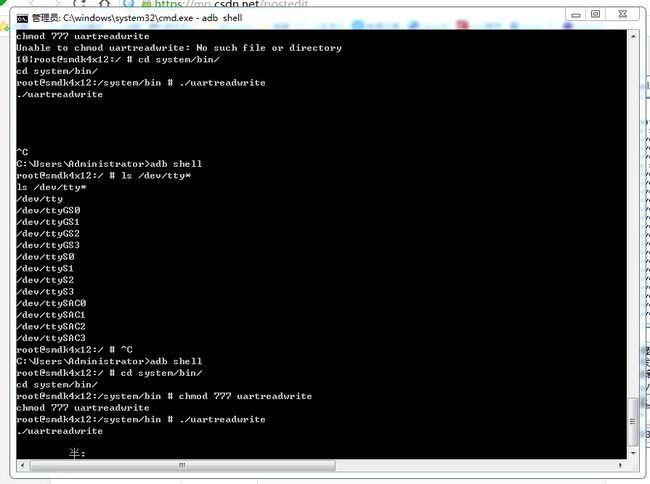
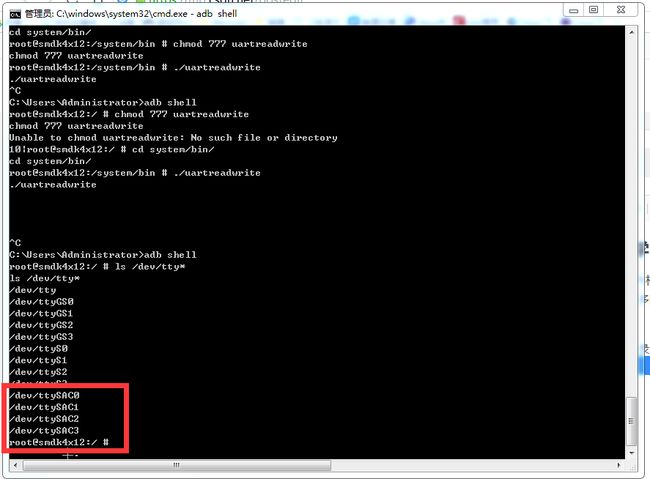
二、查看串口设备节点,在linux系统,串口的设备节点以tty*的形式,是在dev/目录下。这里看一下我手头设备的串口的设备节点。如下图所示我这个板子是有四个串口。
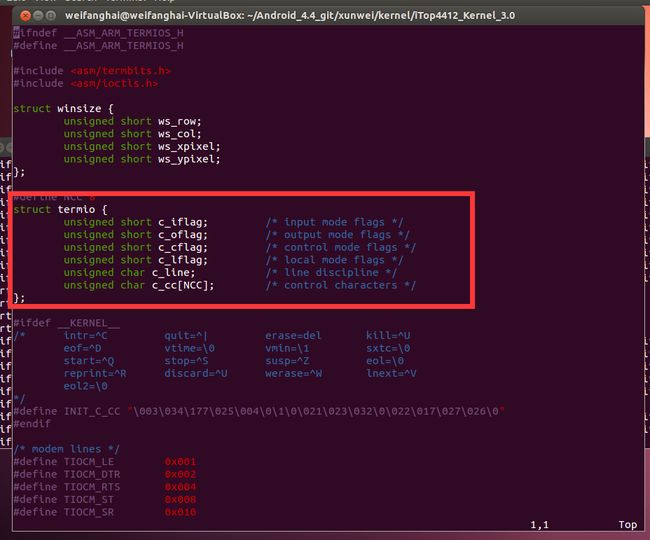
三、串口通信初始化需要设置波特率、数据位、奇偶校验位和停止位等参数,需要用到termio结构体。
struct termio {
unsigned short c_iflag; /* input mode flags */unsigned short c_oflag; /* output mode flags */
unsigned short c_cflag; /* control mode flags */
unsigned short c_lflag; /* local mode flags */
unsigned char c_line; /* line discipline */
unsigned char c_cc[NCC]; /* control characters */
};
四、常用函数介绍。
1、读取当前参数函数:
int tcgetattr(int fd,struct termios *termios_p)
fd:open操作后返回的文件句柄
*termios_p:为前面介绍的结构体
初始化开始前调用这个函数.
2、获取当前波特率函数:
int speed_t cfgetispeed(const struct termios *termios_p)
int speed_t cfgetospeed(const struct termios *termios_p)
*termios_p:为前面介绍的结构体
成功返回0,失败返回-1
3、波特率设置函数:
int cfsetispeed(struct termios *termios_p,speed_t speed)
int cfsetospeed(struct termios *termios_p,speed_t speed)
*termios_p:为前面介绍的结构体
speed:波特率,常用B2400,B4800,B9600,B115200,B460800
成功返回0,失败返回-1
4、清空buffer数据函数:
int tcflush(int fd,int queue_selector)
queue_selector:有三个常用宏定义
TCIFLUSH:清空正读的数据,且不会读出
TCOFLUSH:清空正写入的数据,且不会发送到终端
TCIOFLUSH:清空所有正在发生的I/O数据.
成功返回0,失败返回-1
5、设置串口参数函数:int tcsetattr(int fd,int optional_actions,cons struct termios *termios_p)
optional_actions:有三个常用宏定义
TCSANOW:不等数据传输完毕,立即改变属性
TCSADRAIN:等所有数据传输完毕,再改变属性
TCSAFLUSH:清空输入输出缓冲区才改变属性
成功返回0,失败返回-1
五、实例测试学习。
1、测试C代码。
#include
#include
#include
#include
#include
#include
#include
#include
int set_opt(int,int,int,char,int);
void main()
{
int fd,nByte,flag=1;
char *uart3 = "/dev/ttySAC3";////"/dev/ttySAC3"是con2
char buffer[512];
char *uart_out = "Please input,waiting....\r\n";
char *uart_demo = "Linux uart demo\r\n";
memset(buffer, 0, sizeof(buffer));
//if((fd = open(uart3, O_RDWR|O_NOCTTY))<0)//默认为阻塞读方式
if((fd = open(uart3, O_RDWR|O_NONBLOCK))<0)//非阻塞读方式
printf("open %s is failed",uart3);
else{
set_opt(fd, 115200, 8, 'N', 1);
write(fd,uart_demo, strlen(uart_demo));
write(fd,uart_out, strlen(uart_out));
while(1){
while((nByte = read(fd, buffer, 512))>0){
buffer[nByte+1] = '\0';
write(fd,buffer,strlen(buffer));
memset(buffer, 0, strlen(buffer));
nByte = 0;
}
}
}
}
int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop)
{
struct termios newtio,oldtio;
if ( tcgetattr( fd,&oldtio) != 0) {
perror("SetupSerial 1");
return -1;
}
bzero( &newtio, sizeof( newtio ) );
newtio.c_cflag |= CLOCAL | CREAD;
newtio.c_cflag &= ~CSIZE;
switch( nBits )
{
case 7:
newtio.c_cflag |= CS7;
break;
case 8:
newtio.c_cflag |= CS8;
break;
}
switch( nEvent )
{
case 'O':
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
break;
case 'E':
newtio.c_iflag |= (INPCK | ISTRIP);
newtio.c_cflag |= PARENB;
newtio.c_cflag &= ~PARODD;
break;
case 'N':
newtio.c_cflag &= ~PARENB;
break;
}
switch( nSpeed )
{
case 2400:
cfsetispeed(&newtio, B2400);
cfsetospeed(&newtio, B2400);
break;
case 4800:
cfsetispeed(&newtio, B4800);
cfsetospeed(&newtio, B4800);
break;
case 9600:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
case 115200:
cfsetispeed(&newtio, B115200);
cfsetospeed(&newtio, B115200);
break;
case 460800:
cfsetispeed(&newtio, B460800);
cfsetospeed(&newtio, B460800);
break;
default:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
}
if( nStop == 1 )
newtio.c_cflag &= ~CSTOPB;
else if ( nStop == 2 )
newtio.c_cflag |= CSTOPB;
newtio.c_cc[VTIME] = 100;///* 设置超时10 seconds*/
newtio.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH);
if((tcsetattr(fd,TCSANOW,&newtio))!=0)
{
perror("com set error");
return -1;
}
// printf("set done!\n\r");
return 0;
}
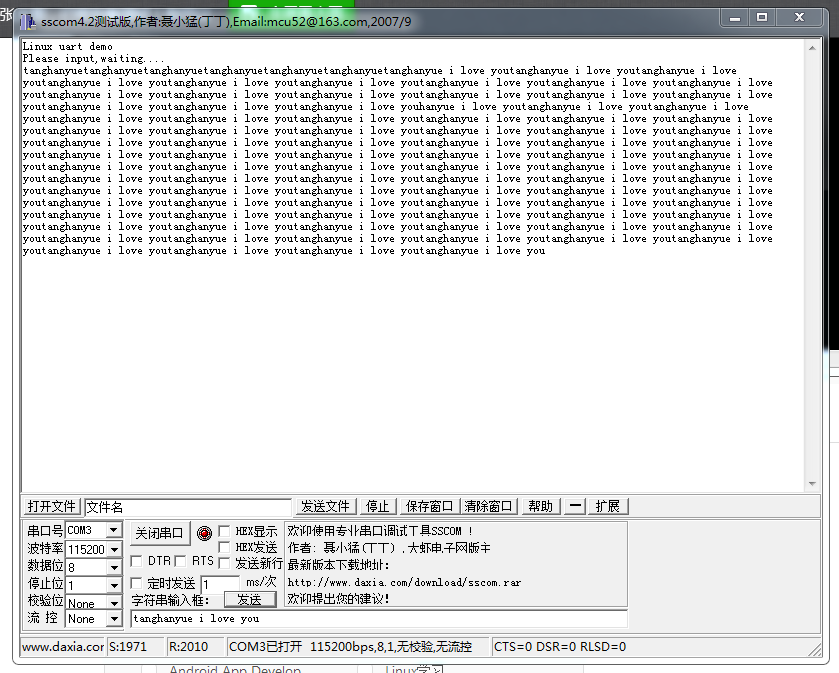
2、执行结果,如下图所示,接收到串口发送过来的数据后马上发送,测试ok。