STM32复习笔记(八)PWM输出(附可直接使用的配置)和 输入捕获
声明:本篇文章只是个人知识盲区、知识弱点、重点部分的归纳总结,望各位大佬不喜勿喷。梳理顺序是按照正点原子的视频和文档的实际顺序梳理,转载请注明出处。
作者:sumjess
适用:这个视频我已经看过3遍了,总会有忘记的,所以来写这本书的随手笔记,记录重点、易忘点。该博客可以当做字典,也可以当做笔记。
目前内容:定时器&定时器中断
一、STM32 PWM工作过程:
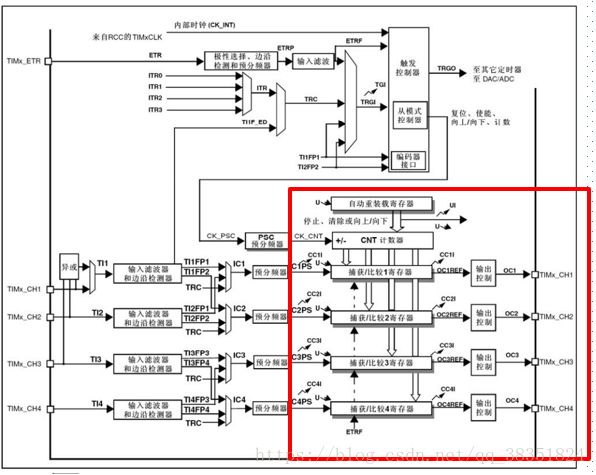
STM32 PWM工作过程(通道1为例)
CCR1:捕获比较(值)寄存器(x=1,2,3,4):设置比较值。
CCMR1: OC1M[2:0]位:对于PWM方式下,用于设置PWM模式1【110】或者PWM模式2【111】
CCER:CC1P位:输入/捕获1输出极性。0:高电平有效,1:低电平有效。
CCER:CC1E位:输入/捕获1输出使能。0:关闭,1:打开。
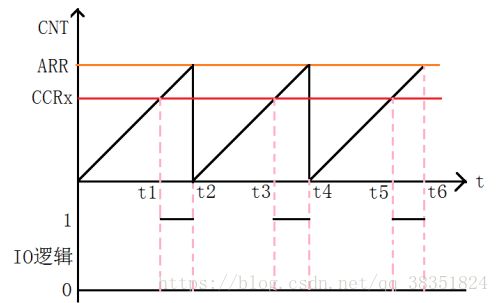
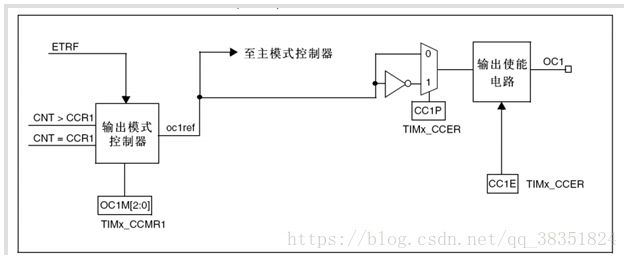
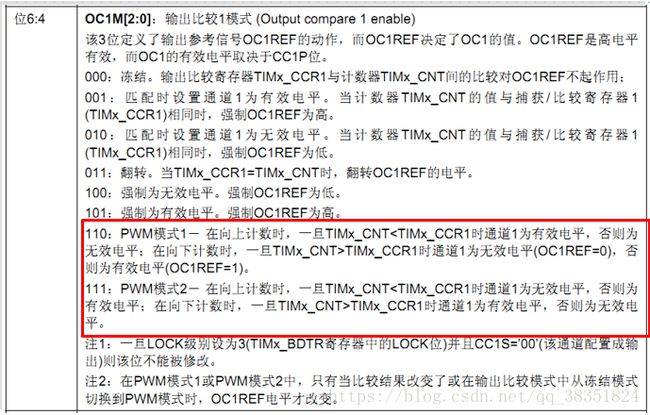
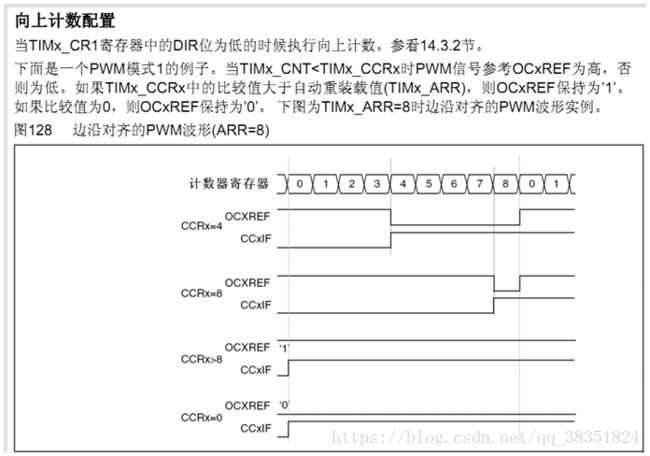
二、PWM模式1 & PWM模式2:
寄存器TIMx_CCMR1的OC1M[2:0]位来分析:

void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
(1)自动重载的预装载寄存器:
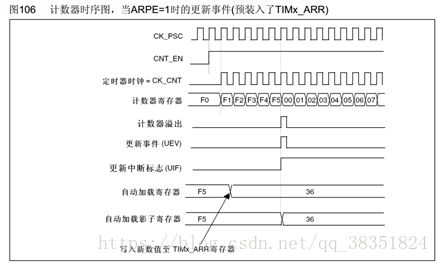
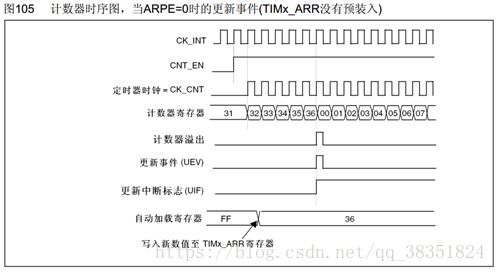
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
简单的说,ARPE=1,ARR立即生效。。。APRE=0,ARR下个比较周期生效。
(2)STM32 定时器3输出通道引脚:
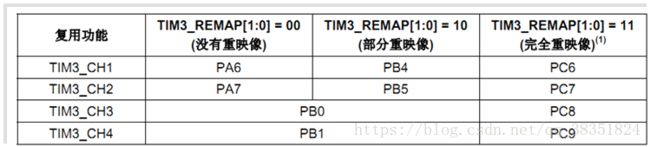
Datasheet中表格会有详细说明
三、PWM输出库函数概述:
(1)PWM输出库函数:
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
typedef struct
{
uint16_t TIM_OCMode; //PWM模式1或者模式2
uint16_t TIM_OutputState; //输出使能 OR失能
uint16_t TIM_OutputNState;
uint16_t TIM_Pulse; //比较值,写CCRx
uint16_t TIM_OCPolarity; //比较输出极性
uint16_t TIM_OCNPolarity;
uint16_t TIM_OCIdleState;
uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure. TIM_Pulse=100;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
(2)设置比较值函数:
void TIM_SetCompareX(TIM_TypeDef* TIMx, uint16_t Compare2);
(3)使能输出比较预装载:
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
(4)使能自动重装载的预装载寄存器允许位:
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
四、PWM输出配置步骤:
① 使能定时器3和相关IO口时钟。
使能定时器3时钟:RCC_APB1PeriphClockCmd();
使能GPIOB时钟:RCC_APB2PeriphClockCmd();
② 初始化IO口为复用功能输出。函数:GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
③ 这里我们是要把PB5用作定时器的PWM输出引脚,所以要重映射配置,
所以需要开启AFIO时钟。同时设置重映射。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
④ 初始化定时器:ARR,PSC等:TIM_TimeBaseInit();
⑤ 初始化输出比较参数:TIM_OC2Init();
⑥ 使能预装载寄存器: TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
⑦ 使能定时器:TIM_Cmd();
⑧ 不断改变比较值CCRx,达到不同的占空比效果:TIM_SetCompare2();
五、STM32 PWM工作过程---输入捕获:
附可直接使用的配置:(方便做各种智能车、擂台等4PWM)
1、底层配置:
void speed_Init(void) //TIM3_CH1->PC6 CH2->PC7 CH3->PC8 CH4->PC9
{
//**********电机驱动设置************//
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure ;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
TIM_DeInit(TIM3);//初始化TIM3寄存器
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE); //Timer3完全重映射 TIM3_CH1->PC6 CH2->PC7 CH3->PC8 CH4->PC9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9; //TIM1_CH1 //设置该引脚为复用输出功能,输出TIM3 CH1的PWM脉冲波形 GPIOC.6
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIO
//**************************************************************************
// 定时器1设置: 72分频,频率10KHz,向上计数,105是为了速度为100时,PWM占空比不会到100,方便电机驱动自举生压。一般PWM频率大于1K,4-10K比较好。
//**************************************************************************
TIM_TimeBaseStructure.TIM_Period = 105-1;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
// 主定时器T3为 PWM3 模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能的预装载寄存器
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能的预装载寄存器
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能的预装载寄存器
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能的预装载寄存器
TIM_ARRPreloadConfig(TIM3, ENABLE); //使能定时器3
TIM_Cmd(TIM3, ENABLE);
}2、函数调用:
#include "delay.h"
#include "sys.h"
#include "sumjess_pwm.h"
int main(void)
{
int b = 0;
delay_init();
speed_Configuration();
while(1)
{
for(b=0;b<100;b+=10){
TIM_SetCompare1(TIM3,b); delay_ms(100);}
for(b=100;b>1;b-=10){
TIM_SetCompare1(TIM3,b); delay_ms(100);}
TIM_SetCompare1(TIM3,0); delay_ms(2000);
for(b=0;b<100;b+=10){
TIM_SetCompare2(TIM3,b); delay_ms(100);}
for(b=100;b>1;b-=10){
TIM_SetCompare2(TIM3,b); delay_ms(100);}
TIM_SetCompare2(TIM3,0); delay_ms(2000);
for(b=0;b<100;b+=10){
TIM_SetCompare3(TIM3,b); delay_ms(100);}
for(b=100;b>1;b-=10){
TIM_SetCompare3(TIM3,b); delay_ms(100);}
TIM_SetCompare3(TIM3,0); delay_ms(2000);
for(b=0;b<100;b+=10){
TIM_SetCompare4(TIM3,b); delay_ms(100);}
for(b=100;b>1;b-=10){
TIM_SetCompare4(TIM3,b); delay_ms(100);}
TIM_SetCompare4(TIM3,0); delay_ms(2000);
}
}☆注:该函数满载为105,即:TIM_SetCompare1(TIM3,105);由于驱动半桥需要自举升压,占空比必须小于98%。最好在95%以下。所以写者留出5%,使用时只需写:0%~100%之间即可。
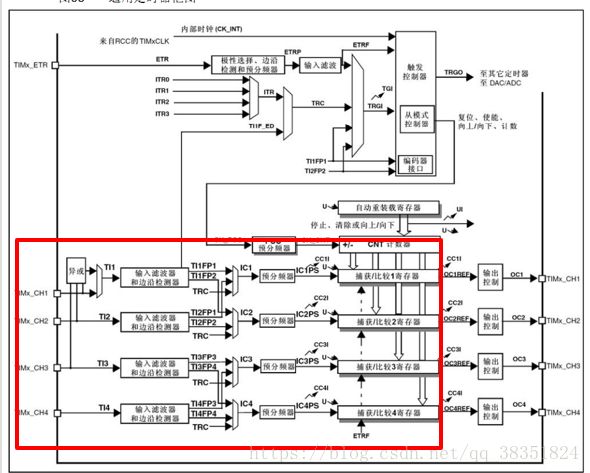
六、STM32 输入捕获工作过程(通道1为例):
一句话总结工作过程:通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。
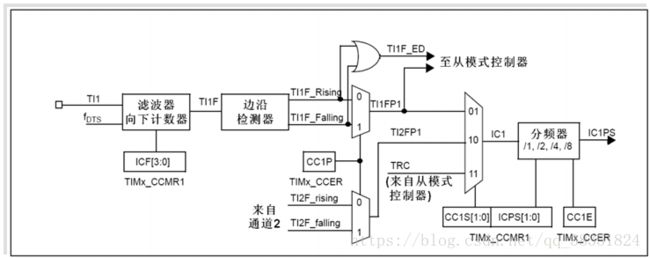
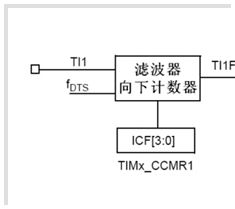
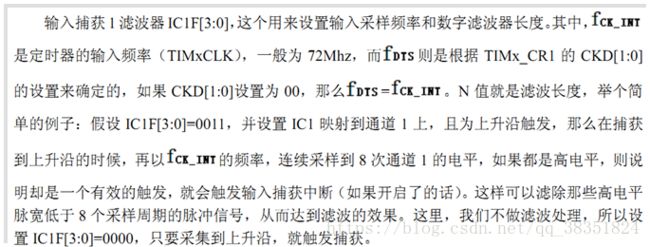
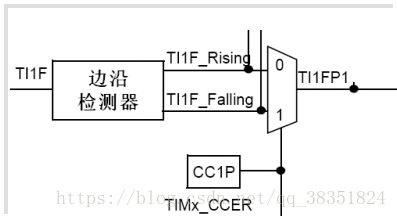
(1)步骤1:设置输入捕获滤波器(通道1为例)
(2)步骤2:设置输入捕获极性(通道1为例)

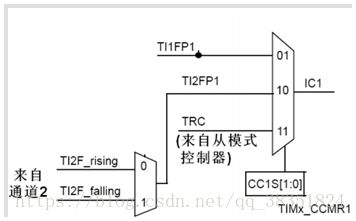
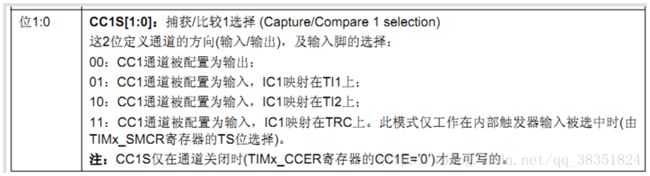
(3)步骤三:设置输入捕获映射通道(通道1为例):
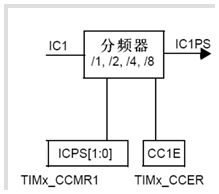
(4)步骤四:设置输入捕获分频器(通道1为例):
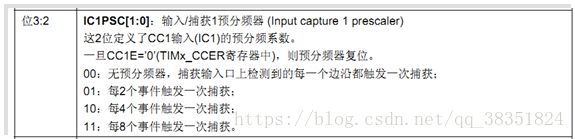
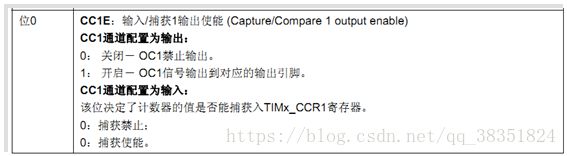
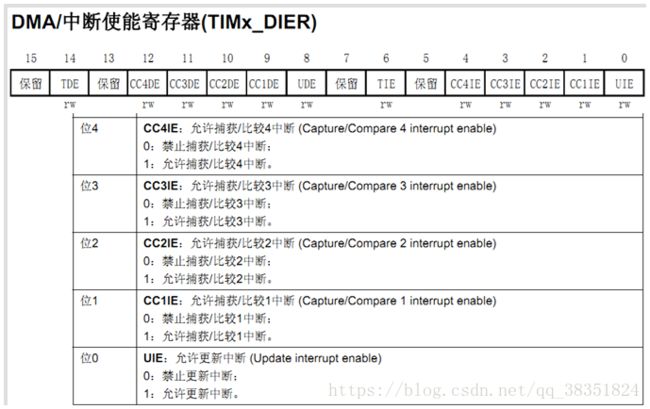
(5)步骤五:捕获到有效信号可以开启中断:
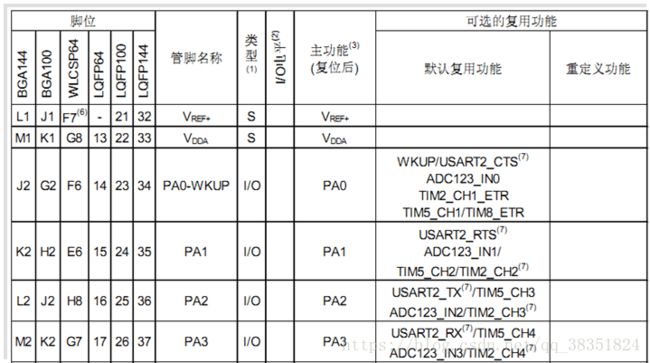
(6)最后:看看定时器通道对应引脚TIM5为例:
七、输入捕获通道初始化函数:
void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct);
typedef struct
{
uint16_t TIM_Channel; //捕获通道1-4
uint16_t TIM_ICPolarity; //捕获极性
uint16_t TIM_ICSelection; //映射关系
uint16_t TIM_ICPrescaler; //分频系数
uint16_t TIM_ICFilter; //滤波器
} TIM_ICInitTypeDef;
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM5_ICInitStructure.TIM_ICFilter = 0x00;
TIM_ICInit(TIM5, &TIM5_ICInitStructure);
八、通道极性设置独立函数:
void TIM_OCxPolarityConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPolarity);
九、获取通道捕获值
uint32_t TIM_GetCapture1(TIM_TypeDef* TIMx);
十、输入捕获的一般配置步骤:
① 初始化定时器和通道对应IO的时钟。
② 初始化IO口,模式为输入:GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入
③初始化定时器ARR,PSC
TIM_TimeBaseInit();
④初始化输入捕获通道
TIM_ICInit();
⑤如果要开启捕获中断,
TIM_ITConfig();
NVIC_Init();
⑥使能定时器:TIM_Cmd();
⑦编写中断服务函数:TIMx_IRQHandler();