51单片机学习总结(八)ADDA(XPT2046)和PWM方波控制舵机
原理图
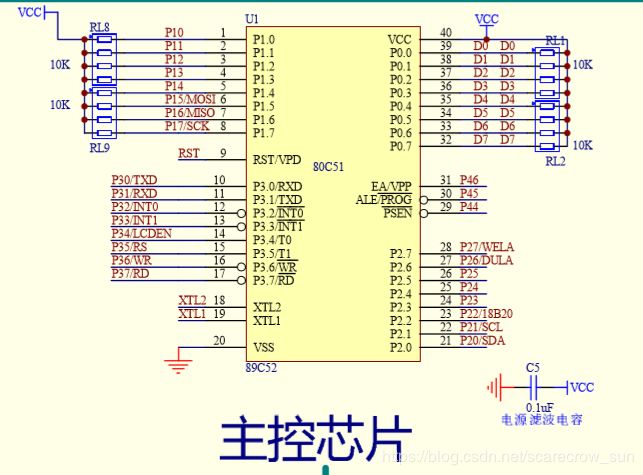
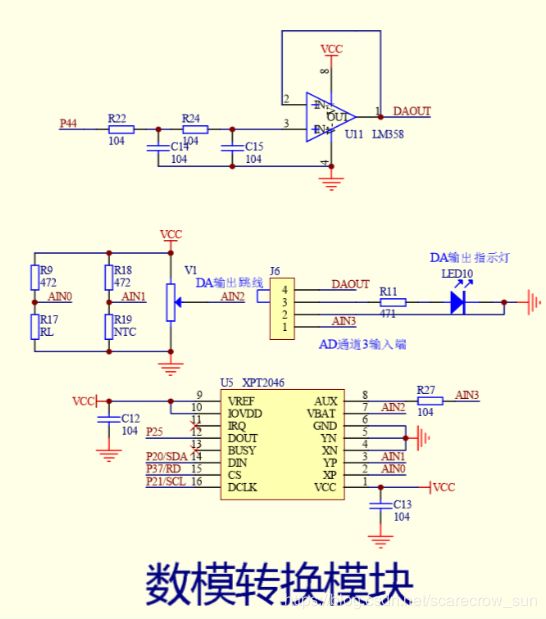
ADDA模块
写在前面
这一块学起来好惫懒…感觉51这样用起来确实没有Arduino方便, 所以对ADDA模块就是一个简单的理解加上可以移植的代码
理解
我们日常生活中的很多变量都是连续的,如光照等等,但是在单片机里,我们只能用离散的量来表示,比如1,2,3,4,5,它是5个点,表示不了这一条直线。所以我们把单片机里的一个值来对应现实生活中的一个范围,比如1.0对应生活中光照在0.95到1.05这一个范围的值,这也就是AD,即模拟转数字
在这里面,我们可以和尺子做类比,尺子有一个总长度和精确度,同样我们的XPT2046也可以来设置,比如设置5V的电压,精度给12位2进制,那么XPT2046每增加一个数码量,即+1的时候,那么它对应的电压就加了5V/4096 V
通过光敏电阻和温敏电阻,我们可以得到不同的电压阻,利用这一个电压值,再通过XPT2046的逐次逼近法,就可以得到一个个用一个值来对应以段范围的值
那么DA,数字转模拟,我们就用PWM方波来控制舵机来当作例子,首先大家要自行去了解一下PWM方波的一些性质,占空比,频率等等,我们可以利用这些不同的频率,占空比等等来控制我们舵机来转指定的角度。
/*读光敏值*/
/*********************************************************************************
* 【作 者】: 清翔电子
* 【程序功能】: 四位数码管显示AD通道0电压
********************************************************************************/
#include PWM方波控制舵机
这个直接上代码吧,其中有些函数移植性还不错
以后有机会来补全PWM方波的知识
这个文件是用三个键来控制舵机移动90 0 -90度,用的舵机是SG90
#include