十.ARM裸机学习之中断系统2(S5PV210按键外部中断及中断处理)
上接:
http://blog.csdn.net/wangweijundeqq/article/details/78634146
ARM裸机学习之中断系统1(S5PV210的中断系统详解)
六
、
S5PV210中断处理
1.S5PV210的外部中断通过外部中断对应的GPIO产生
外部中断寄存器位于文档中GPIO部分。
外部中断的主要寄存器:
EXT_INT_N_CON:设置外部中断的触发方式
EXT_INT_N_PEND:中断挂起寄存器,32位,每位对应一个外部中断源,
EXT_INT_N_MASK:中断掩码控制寄存器,各个外部中断的使能/禁止开关。

分析X210开发板的按键对应的EINT编号:
GPIO :SW5:GPH0_2 SW6:GPH0_3 SW78910:GPH2_0123
EINT :EINT2、EINT3、EINT16、EINT17、EINT18、EINT19
2.中断方式处理按键编程
- 按键的初始化(包括外部中断的GPIO,触发模式等设置,分开说明)
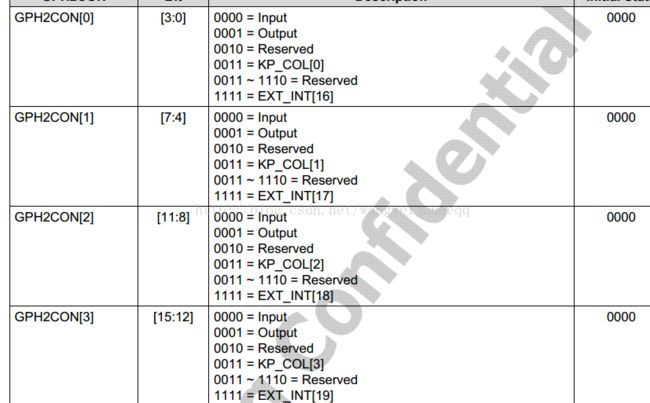
2.1. 外部中断对应的GPIO模式设置
rGPH0CON |= 0xFF<<8; // GPH0_2 GPH0_3设置为外部中断模式
rGPH2CON |= 0xFFFF<<0;// GPH2_0123共4个引脚设置为外部中断模式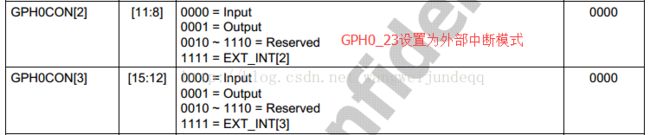
.
2.2. 中断触发模式设置
rEXT_INT_0_CON &= ~(0xFF<<8); // bit8~bit15全部清零
rEXT_INT_0_CON |= ((2<<8)|(2<<12)); // EXT_INT2和EXT_INT3设置为下降沿触发
rEXT_INT_2_CON &= ~(0xFFFF<<0); //EINT16、17、18、19,设置为下降沿触发
rEXT_INT_2_CON |= ((2<<0)|(2<<4)|(2<<8)|(2<<12)); 

按键的初始化(包括外部中断的GPIO,触发模式等设置)的整合如下:
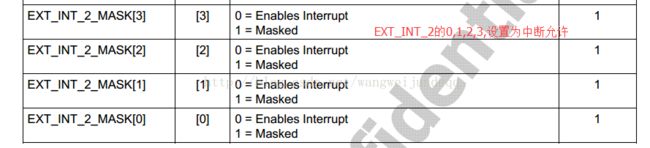
2.3. 中断允许
rEXT_INT_0_MASK &= ~(3<<2); // 外部中断允许
rEXT_INT_2_MASK &= ~(0x0f<<0);
2.4. 清挂起,清除是写1,不是写0
rEXT_INT_0_PEND |= (3<<2);
rEXT_INT_2_PEND |= (0x0F<<0);

按键的初始化(包括外部中断的GPIO,触发模式等设置)的整合如下:

3.中断处理程序isr编写及其整体调用
3.1.中断ISR处理函数的编写,即(类似于STM32的中断服务函数)

3.2.绑定isr到中断控制器硬件


3.3.使能中断(不是使能外部中断(因前面的中断初始化已经使能),是使能中断控制器)

3.4.整体调用如下:

3.5
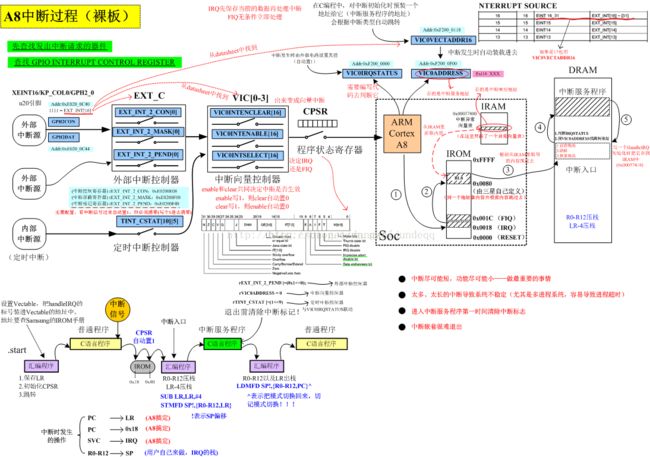
最后,上面的理解在结合下图 一起理解,就显得很简单了。
中断处理的编程模型:
(参考
http://blog.csdn.net/kiny_anderson/article/details/46884893
)
int.c:
#include "int.h"
#include "stdio.h"
void reset_exception(void)
{
printf("reset_exception.\n");
}
void undef_exception(void)
{
printf("undef_exception.\n");
}
void sotf_int_exception(void)
{
printf("sotf_int_exception.\n");
}
void prefetch_exception(void)
{
printf("prefetch_exception.\n");
}
void data_exception(void)
{
printf("data_exception.\n");
}
// 主要功能:绑定第一阶段异常向量表;禁止所有中断;选择所有中断类型为IRQ;
// 清除VICnADDR为0
void system_init_exception(void)
{
// 第一阶段处理,绑定异常向量表
r_exception_reset = (unsigned int)reset_exception;
r_exception_undef = (unsigned int)undef_exception;
r_exception_sotf_int = (unsigned int)sotf_int_exception;
r_exception_prefetch = (unsigned int)prefetch_exception;
r_exception_data = (unsigned int)data_exception;
r_exception_irq = (unsigned int)IRQ_handle;
r_exception_fiq = (unsigned int)IRQ_handle;
// 初始化中断控制器的基本寄存器
intc_init();
}
// 清除需要处理的中断的中断处理函数的地址
void intc_clearvectaddr(void)
{
// VICxADDR:当前正在处理的中断的中断处理函数的地址
VIC0ADDR = 0;
VIC1ADDR = 0;
VIC2ADDR = 0;
VIC3ADDR = 0;
}
// 初始化中断控制器
void intc_init(void)
{
// 禁止所有中断
// 为什么在中断初始化之初要禁止所有中断?
// 因为中断一旦打开,因为外部或者硬件自己的原因产生中断后一定就会寻找isr
// 而我们可能认为自己用不到这个中断就没有提供isr,这时它自动拿到的就是乱码
// 则程序很可能跑飞,所以不用的中断一定要关掉。
// 一般的做法是先全部关掉,然后再逐一打开自己感兴趣的中断。一旦打开就必须
// 给这个中断提供相应的isr并绑定好。
VIC0INTENCLEAR = 0xffffffff;
VIC1INTENCLEAR = 0xffffffff;
VIC2INTENCLEAR = 0xffffffff;
VIC3INTENCLEAR = 0xffffffff;
// 选择中断类型为IRQ
VIC0INTSELECT = 0x0;
VIC1INTSELECT = 0x0;
VIC2INTSELECT = 0x0;
VIC3INTSELECT = 0x0;
// 清VICxADDR
intc_clearvectaddr();
}
// 绑定我们写的isr到VICnVECTADDR寄存器
// 绑定过之后我们就把isr地址交给硬件了,剩下的我们不用管了,硬件自己会处理
// 等发生相应中断的时候,我们直接到相应的VICnADDR中去取isr地址即可。
// 参数:intnum是int.h定义的物理中断号,handler是函数指针,就是我们写的isr
// VIC0VECTADDR定义为VIC0VECTADDR0寄存器的地址,就相当于是VIC0VECTADDR0~31这个
// 数组(这个数组就是一个函数指针数组)的首地址,然后具体计算每一个中断的时候
// 只需要首地址+偏移量即可。
void intc_setvectaddr(unsigned long intnum, void (*handler)(void))
{
//VIC0
if(intnum<32)
{
*( (volatile unsigned long *)(VIC0VECTADDR + 4*(intnum-0)) ) = (unsigned)handler;
}
//VIC1
else if(intnum<64)
{
*( (volatile unsigned long *)(VIC1VECTADDR + 4*(intnum-32)) ) = (unsigned)handler;
}
//VIC2
else if(intnum<96)
{
*( (volatile unsigned long *)(VIC2VECTADDR + 4*(intnum-64)) ) = (unsigned)handler;
}
//VIC3
else
{
*( (volatile unsigned long *)(VIC3VECTADDR + 4*(intnum-96)) ) = (unsigned)handler;
}
return;
}
// 使能中断
// 通过传参的intnum来使能某个具体的中断源,中断号在int.h中定义,是物理中断号
void intc_enable(unsigned long intnum)
{
unsigned long temp;
// 确定intnum在哪个寄存器的哪一位
// <32就是0~31,必然在VIC0
if(intnum<32)
{
temp = VIC0INTENABLE;
temp |= (1<
key.c:
#include "stdio.h"
#include "main.h"
// 定义操作寄存器的宏
#define GPH0CON 0xE0200C00
#define GPH0DAT 0xE0200C04
#define GPH2CON 0xE0200C40
#define GPH2DAT 0xE0200C44
#define rGPH0CON (*(volatile unsigned int *)GPH0CON)
#define rGPH0DAT (*(volatile unsigned int *)GPH0DAT)
#define rGPH2CON (*(volatile unsigned int *)GPH2CON)
#define rGPH2DAT (*(volatile unsigned int *)GPH2DAT)
#define EXT_INT_0_CON 0xE0200E00
#define EXT_INT_2_CON 0xE0200E08
#define EXT_INT_0_PEND 0xE0200F40
#define EXT_INT_2_PEND 0xE0200F48
#define EXT_INT_0_MASK 0xE0200F00
#define EXT_INT_2_MASK 0xE0200F08
#define rEXT_INT_0_CON (*(volatile unsigned int *)EXT_INT_0_CON)
#define rEXT_INT_2_CON (*(volatile unsigned int *)EXT_INT_2_CON)
#define rEXT_INT_0_PEND (*(volatile unsigned int *)EXT_INT_0_PEND)
#define rEXT_INT_2_PEND (*(volatile unsigned int *)EXT_INT_2_PEND)
#define rEXT_INT_0_MASK (*(volatile unsigned int *)EXT_INT_0_MASK)
#define rEXT_INT_2_MASK (*(volatile unsigned int *)EXT_INT_2_MASK)
//------------------------轮询方式处理按键---------------------------
// 初始化按键
void key_init(void)
{
// 设置GPHxCON寄存器,设置为输入模式
// GPH0CON的bit8~15全部设置为0,即可
rGPH0CON &= ~(0xFF<<8);
// GPH2CON的bit0~15全部设置为0,即可
rGPH2CON &= ~(0xFFFF<<0);
}
static void delay20ms(void)
{
// 这个函数作用是延时20ms
// 因为我们这里是裸机程序,且重点不是真的要消抖,而是教学
// 所以我这里这个程序只是象征性的,并没有实体
// 如果是研发,那就要花时间真的调试出延时20ms的程序
int i, j;
for (i=0; i<100; i++)
{
for (j=0; j<1000; j++)
{
i * j;
}
}
}
void key_polling(void)
{
// 依次,挨个去读出每个GPIO的值,判断其值为1还是0.如果为1则按键按下,为0则弹起
// 轮询的意思就是反复循环判断有无按键,隔很短时间
while (1)
{
// 对应开发板上标着LEFT的那个按键
if (rGPH0DAT & (1<<2))
{
// 为1,说明没有按键
led_off();
}
else
{
// 添加消抖
// 第一步,延时
delay20ms();
// 第二步,再次检验按键状态
if (!(rGPH0DAT & (1<<2)))
{
// 为0,说明有按键
led1();
printf("key left.\n");
}
}
// 对应开发板上标着DOWN的那个按键
if (rGPH0DAT & (1<<3))
{
// 为1,说明没有按键
led_off();
}
else
{
// 为0,说明有按键
led2();
printf("key down.\n");
}
// 对应开发板上标着UP的那个按键
if (rGPH2DAT & (1<<0))
{
// 为1,说明没有按键
led_off();
}
else
{
// 为0,说明有按键
led3();
}
}
}
//-----------------------中断方式处理按键-----------------------------------
// 以中断方式来处理按键的初始化
void key_init_interrupt(void)
{
// 1. 外部中断对应的GPIO模式设置
rGPH0CON |= 0xFF<<8; // GPH0_2 GPH0_3设置为外部中断模式
rGPH2CON |= 0xFFFF<<0; // GPH2_0123共4个引脚设置为外部中断模式
// 2. 中断触发模式设置
rEXT_INT_0_CON &= ~(0xFF<<8); // bit8~bit15全部清零
rEXT_INT_0_CON |= ((2<<8)|(2<<12)); // EXT_INT2和EXT_INT3设置为下降沿触发
rEXT_INT_2_CON &= ~(0xFFFF<<0);
rEXT_INT_2_CON |= ((2<<0)|(2<<4)|(2<<8)|(2<<12));
// 3. 中断允许
rEXT_INT_0_MASK &= ~(3<<2); // 外部中断允许
rEXT_INT_2_MASK &= ~(0x0f<<0);
// 4. 清挂起,清除是写1,不是写0
rEXT_INT_0_PEND |= (3<<2);
rEXT_INT_2_PEND |= (0x0F<<0);
}
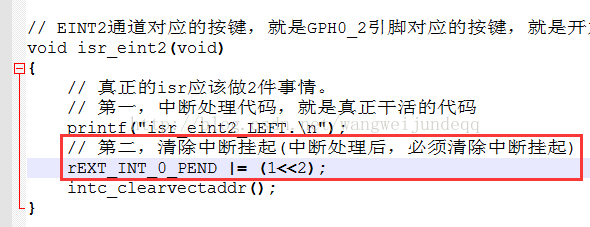
// EINT2通道对应的按键,就是GPH0_2引脚对应的按键,就是开发板上标了LEFT的那个按键
void isr_eint2(void)
{
// 真正的isr应该做2件事情。
// 第一,中断处理代码,就是真正干活的代码
printf("isr_eint2_LEFT.\n");
// 第二,清除中断挂起(中断处理后,必须清除中断挂起)
rEXT_INT_0_PEND |= (1<<2);
intc_clearvectaddr();//清除需要处理的中断的中断处理函数的地址
}
void isr_eint3(void)
{
// 真正的isr应该做2件事情。
// 第一,中断处理代码,就是真正干活的代码
printf("isr_eint3_DOWN.\n");
// 第二,清除中断挂起
rEXT_INT_0_PEND |= (1<<3);
intc_clearvectaddr();// 清除需要处理的中断的中断处理函数的地址
}
void isr_eint16171819(void)
{
// 真正的isr应该做2件事情。
// 第一,中断处理代码,就是真正干活的代码
// 因为EINT16~31是共享中断,所以要在这里再次去区分具体是哪个子中断
if (rEXT_INT_2_PEND & (1<<0))
{
printf("eint16\n");
}
if (rEXT_INT_2_PEND & (1<<1))
{
printf("eint17\n");
}
if (rEXT_INT_2_PEND & (1<<2))
{
printf("eint18\n");
}
if (rEXT_INT_2_PEND & (1<<3))
{
printf("eint19\n");
}
// 第二,清除中断挂起
rEXT_INT_2_PEND |= (0x0f<<0);
intc_clearvectaddr();
}
start.S:
#define WTCON 0xE2700000
#define SVC_STACK 0xd0037d80
#define IRQ_STACK 0xd0037f80
.global _start
.global IRQ_handle
// 把_start链接属性改为外部,这样其他文件就可以看见_start了
_start:
// 第1步:关看门狗(向WTCON的bit5写入0即可)
ldr r0, =WTCON
ldr r1, =0x0
str r1, [r0]
// 第2步:初始化时钟
bl clock_init
// 第3步:设置SVC栈
ldr sp, =SVC_STACK
// 第4步:开/关icache
mrc p15,0,r0,c1,c0,0; // 读出cp15的c1到r0中
//bic r0, r0, #(1<<12) // bit12 置0 关icache
orr r0, r0, #(1<<12) // bit12 置1 开icache
mcr p15,0,r0,c1,c0,0;
bl main
// 从这里之后就可以开始调用C程序了
//bl led_blink // led_blink是C语言实现的一个函数
// 汇编最后的这个死循环不能丢
b .
// 在这个汇编函数中,用来做中断模式下的现场保护和恢复,并且调用真正的中断处理程序
IRQ_handle:
// 设置IRQ模式下的栈
ldr sp, =IRQ_STACK
// 保存LR
// 因为ARM有流水线,所以PC的值会比真正执行的代码+8,
sub lr, lr, #4
// 保存r0-r12和lr到irq模式下的栈上面
stmfd sp!, {r0-r12, lr}
// 在此调用真正的isr来处理中断
bl irq_handler
// 处理完成开始恢复现场,其实就是做中断返回,关键是将r0-r12,pc,cpsr一起回复
ldmfd sp!, {r0-r12, pc}^
main.c:
#include "stdio.h"
#include "int.h"
#include "main.h"
void uart_init(void);
#define KEY_EINT2 NUM_EINT2 // left NUM_EINT2为按键对应中断源编号
#define KEY_EINT3 NUM_EINT3 // down
#define KEY_EINT16_19 NUM_EINT16_31 // 其余4个共用的
void delay(int i)
{
volatile int j = 10000;
while (i--)
while(j--);
}
int main(void)
{
uart_init();
key_init_interrupt();//中断方式处理按键的初始化
// 如果程序中要使用中断,就要调用中断初始化来初步初始化中断控制器
system_init_exception();
printf("-------------key interrypt test--------------");
// 绑定isr到中断控制器硬件
intc_setvectaddr(KEY_EINT2, isr_eint2);
intc_setvectaddr(KEY_EINT3, isr_eint3);
intc_setvectaddr(KEY_EINT16_19, isr_eint16171819);
// 使能中断
intc_enable(KEY_EINT2);
intc_enable(KEY_EINT3);
intc_enable(KEY_EINT16_19);
// 在这里加个心跳
while (1)
{
printf("A ");
delay(10000);
}
return 0;
}