基于stm32的HC-SR04超声波测距模块使用
1 工作原理
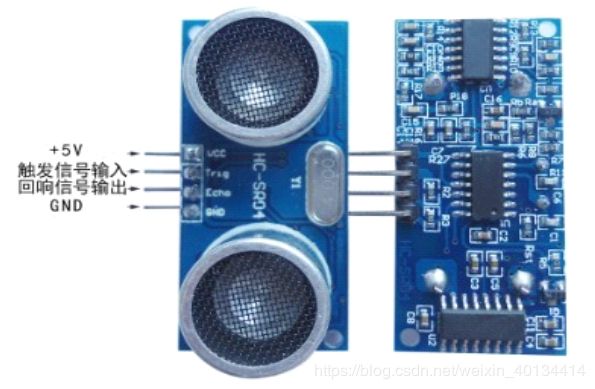
使用超声波模块之前,先了解其IO口和工作原理:
1.1 IO说明
VCC: 供5V电源
GND: 为地线
TRIG: 触发控制信号输入
ECHO: 回响信号输出
1.2 基本工作原理:
认真看好以下工作原理,后面的代码就是基于工作原理来实现的。
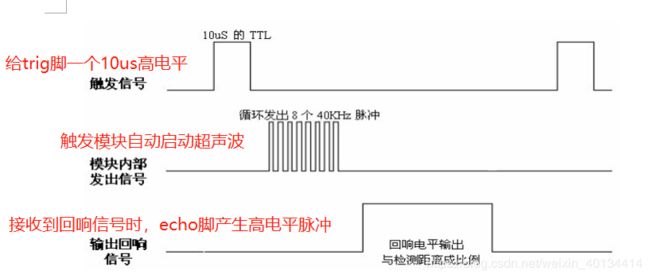
(1)采用IO口TRIG触发测距,给最少10us的高电平信号。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回, 通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。 测试距离=(高电平时间*声速(340M/S))/2
时序图:
2 程序编写
2.1 外设配置
根据两个信号引脚来配置两个单片机的IO口
trig: 需要产生一个10us高电平, 配置为推挽输出;
echo: 等待高电平脉冲并测量其脉冲宽度, 配置为下拉输入
测量echo的高电平持续的时间,需要用到定时器, 因此配置一个定时器,用来计时
void UltrasonicWave_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; // 对应trig引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // 对应echo引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //下拉输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
//定时器初始化,分频系数为71,则频率为1MHZ,每个计数为1us,(频率越高越精确)
//重装载值为65535,溢出时间为1us*65536= 65.536ms=0.065536s
//一个计数周期可以测距 0.065536s * 340m/s / 2 = 11.14112m
TIM_TimeBaseStructure.TIM_Period = 65535;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //
}
2.2 测距函数
根据工作原理 :
(1)采用IO口TRIG触发测距,给最少10us的高电平信号。
/***** 启动超声波 *****/
void UltrasonicWave_StartMeasure(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_1); //拉高PB1电平
delay_us(20); //持续20us
GPIO_ResetBits(GPIOB, GPIO_Pin_1); //拉低PB1电平
}
(2)有信号返回, 通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。 测试距离=(高电平时间*声速(340M/S))/2
/***** 测距 *****/
float UltrasonicWave_Measure(void) //
{
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10)==1);//echo为高电平时,则等待至低电平,才启动超声波
UltrasonicWave_StartMeasure(); //启动超声波
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10) == 0);//等待echo的高电平到来
TIM_SetCounter(TIM2,0); //清零计数器
TIM_Cmd(TIM2, ENABLE); //使能定时器2,开始计数
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10) == 1);//等待echo的高电平结束
TIM_Cmd(TIM52, DISABLE); //失能定时器2,截止计数
return (TIM_GetCounter(TIM2))/1000000*340/2 *100; //此处单位转换为cm
}
2.3 测距
int main()
{
float distance;
UltrasonicWave_Init(void);//初始化
delay_init();
while(1)
{
distance = UltrasonicWave_Measure(void); //完成测距
delay_ms(60);//建议测量周期为 60ms以上, 以防止发射信号对回响信号的影响。
printf("distance:%5.2f ",distance);//打印到串口
}
}
还可以使用中断方式进行测距, 大致框架如下, 有兴趣自行研究
//先开启对应引脚双边沿触发中断, 中断服务函数大致如下
float Distance;
void EXTI15_10_IRQHandler(void)
{
if(//发生中断)
{
if(//上升沿)
{
TIM_SetCounter(TIM2,0); //清零计数器
TIM_Cmd(TIM2, ENABLE); //使能定时器2,开始计数
}
if(//下降沿)
{
TIM_Cmd(TIM52, DISABLE); //失能定时器2,截止计数
Distance=(TIM_GetCounter(TIM2))/1000000*340/2 *100;//此处单位转换为cm
}
}
EXTI_ClearITPendingBit(EXTI_Line10); //清除中断标志
}
//主函数
```c
extern float Distance;
int main()
{
UltrasonicWave_Init(void);//初始化
while(1)
{
UltrasonicWave_StartMeasure();//启动超声波
delay_ms(60);//建议测量周期为 60ms以上, 以防止发射信号对回响信号的影响。
//Distance 在中断服务函数中被重新赋值
printf("Distance:%5.2f ",Distance);//打印到串口
}
}
以上超声波模块的使用一次记录,欢迎一起讨论