Ubuntu下使用yolo训练自己的数据集
Ubuntu下使用Yolov3训练自己的数据集
主要内容:
使用yolov3卷积神经网络训练自己的数据集,从而实现道路环境检测。主要检测的目标有三类,分别是行人、路坑以及道路上的石头。
目录
1.采集数据集
2.搭建训练环境
3.下载darknet源码
4.下载预训练模型
5.处理数据集
6.修改网络配置文件
7 . 训练模型
8. 训练注意的问题
1.采集数据集
采集含有目标物的图片,制作成数据集。数据集的数量尽可能的多,包含的场景尽量多,这样训练出的模型效果会更好。 使用labelme软件进行数据集的标注,可以标注多个类别。 最终的数据集格式是一张图片对应一个xml,数据格式如下图所示:所有图片存在一个文件夹,所有xml存在一个文件夹,且图片与xml一一对应。注意事项,图片的名称和标注的类别不能含有中文字符。
2.搭建训练环境
原本打算在虚拟机上训练,由于显卡驱动安装失败,放弃。选择装双系统:win10+Ubuntu16.04。本机GPU为gtx1650,官网找到对应显卡驱动并安装。配置cuda10.0和cudnn,opencv4.0。在配置cuda时注意,由于以及安装了显卡驱动,故有一项关于驱动的安装应选择NO。
3.下载darknet源码
终端输入命令
git clone https://github.com/pjreddie/darknet
进入到darknet目录,修改makefile文件。需要使能GPU,cudnn和opencv。安装opencv4.0版本,make时报错,显示不支持c++11。这里将不使能opencv。
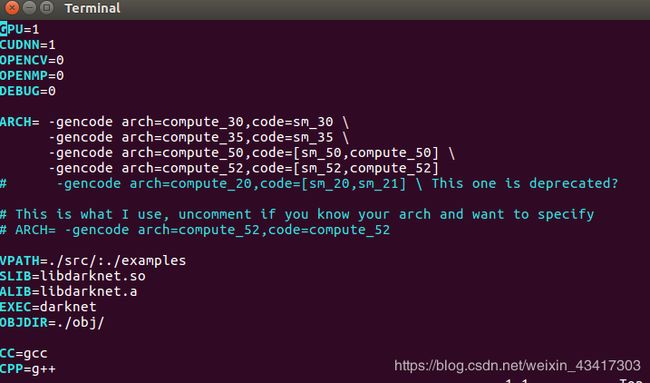
修改cuda路径,即nvcc文件路径。

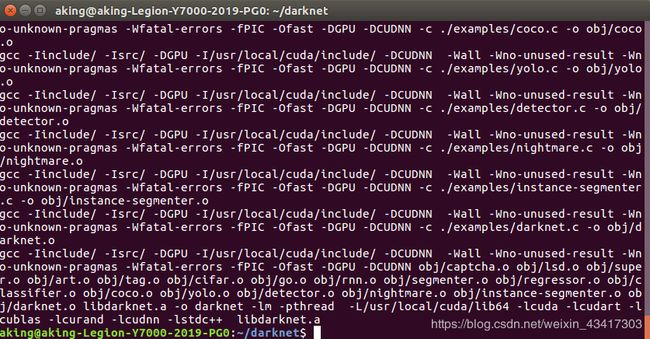
开始make编译,编译成功如下
 4.下载预训练模型
4.下载预训练模型
wget https://pjreddie.com/media/files/darknet53.conv.74
./darknet detect cfg/yolov3.cfg darknet53.conv.74 data/dog.jpg
显示如下错误提示
 终端输入,解决问题,我也不知道啥意思
终端输入,解决问题,我也不知道啥意思
export LD_LIBRARY_PATH="/usr/local/cuda-10.0/lib64"
继续以上操作,显示如下错误提示,显存不足
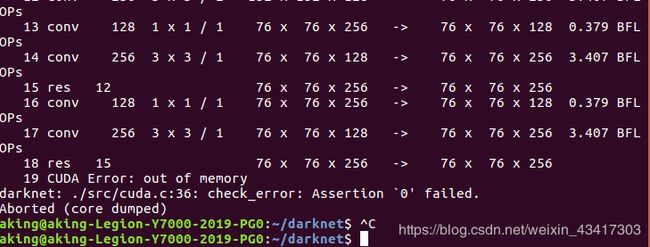
解决办法:
需要修改所使用的模型cfg文件中的subdivision的参数。
由subdivisions=8改成subdivisions=64。
subdivision:这个参数很有意思的,它会让你的每一个batch不是一下子都丢到网络里。而是分成subdivision对应数字的份数,一份一份的跑完后,在一起打包算作完成一次iteration。这样会降低对显存的占用情况。如果设置这个参数为1的话就是一次性把所有batch的图片都丢到网络里,如果为2的话就是一次丢一半。
cd cfg
gedit yolov3.cfg
继续之前操作,可以看到YOLO的运行结果。到这里,YOLOV3已经走通了,是时候开始加入自己的数据了。
5.处理数据集
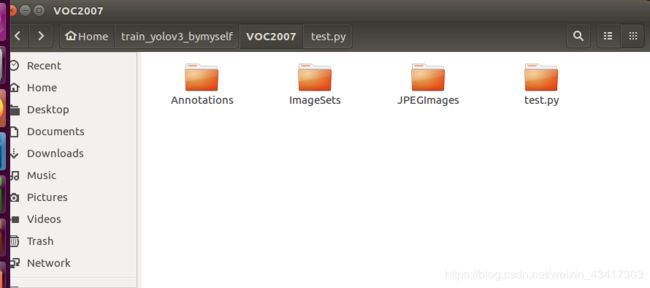
5.1按照voc2007数据集格式制作文件夹,如下图所示。Annotatios为xml文件夹,JPEGImages为图片文件夹。
 ImageSets里Main文件夹,用到4个文件:
ImageSets里Main文件夹,用到4个文件:
-
train.txt 是用来训练的图片文件的文件名列表 ,约trainval的50%
-
val.txt是用来验证的图片文件的文件名列表 ,约trainval的50%
-
trianval.txt是用来训练和验证的图片文件的文件名列表 ,约整个数据集的50%
-
test.txt 是用来测试的图片文件的文件名列表 ,约整个数据集的50%
使用Matlab做VOC里的txt文件
clear;clc;
%%%%%%%%% 第一类检测目标pedestrian 制作TXT文件 %%%%%%%%%%%%%%%
file1 = dir('G:\My_Project\train_yolov3_bymyself\VOC2007\Annotations\pedestrian'); % pedestrian xml文件地址xml文件地址
path1 = 'G:\My_Project\train_yolov3_bymyself\VOC2007\ImageSets\Main\pedestrian'; % txt文件存放的地址
len1 = length(file1)-2;
num1_trainval=sort(randperm(len1, floor(1*len1/2))); %trainval集占所有数据的1/2,可以根据需要设置
num1_train=sort(num1_trainval(randperm(length(num1_trainval), floor(1*length(num1_trainval)/2)))); %train集占trainval集的1/2,可以根据需要设置
num1_val=setdiff(num1_trainval,num1_train); %trainval集剩下的作为val集
num1_test=setdiff(1:len1,num1_trainval);%剩下的作为test集
fid=fopen(strcat(path1, '_trainval.txt'),'a+');
for i=1:length(num1_trainval)
s = sprintf('%s',file1(num1_trainval(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path1, '_train.txt'),'a+');
for i=1:length(num1_train)
s = sprintf('%s',file1(num1_train(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path1, '_val.txt'),'a+');
for i=1:length(num1_val)
s = sprintf('%s',file1(num1_val(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path1, '_test.txt'),'a+');
for i=1:length(num1_test)
s = sprintf('%s',file1(num1_test(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
%%%%%%%%% 第二类检测目标chuckhole 制作TXT文件 %%%%%%%%%%%%%%%
file2 = dir('G:\My_Project\train_yolov3_bymyself\VOC2007\Annotations\chuckhole'); % chuckhole xml文件地址xml文件地址
path2 = 'G:\My_Project\train_yolov3_bymyself\VOC2007\ImageSets\Main\chuckhole'; % txt文件存放的地址
len2 = length(file2)-2;
num2_trainval=sort(randperm(len2, floor(1*len2/2))); %trainval集占所有数据的1/2,可以根据需要设置
num2_train=sort(num2_trainval(randperm(length(num2_trainval), floor(1*length(num2_trainval)/2)))); %train集占trainval集的1/2,可以根据需要设置
num2_val=setdiff(num2_trainval,num2_train); %trainval集剩下的作为val集
num2_test=setdiff(1:len2,num2_trainval);%剩下的作为test集
fid=fopen(strcat(path2, '_trainval.txt'),'a+');
for i=1:length(num2_trainval)
s = sprintf('%s',file2(num2_trainval(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path2, '_train.txt'),'a+');
for i=1:length(num2_train)
s = sprintf('%s',file2(num2_train(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path2, '_val.txt'),'a+');
for i=1:length(num2_val)
s = sprintf('%s',file2(num2_val(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path2, '_test.txt'),'a+');
for i=1:length(num2_test)
s = sprintf('%s',file2(num2_test(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
%%%%%%%%% 第三类检测目标stone 制作TXT文件 %%%%%%%%%%%%%%%
file3 = dir('G:\My_Project\train_yolov3_bymyself\VOC2007\Annotations\stone'); % stone xml文件地址xml文件地址
path3 = 'G:\My_Project\train_yolov3_bymyself\VOC2007\ImageSets\Main\stone'; % txt文件存放的地址
len3 = length(file3)-2;
num3_trainval=sort(randperm(len3, floor(1*len3/2))); %trainval集占所有数据的1/2,可以根据需要设置
num3_train=sort(num3_trainval(randperm(length(num3_trainval), floor(1*length(num3_trainval)/2)))); %train集占trainval集的1/2,可以根据需要设置
num3_val=setdiff(num3_trainval,num3_train); %trainval集剩下的作为val集
num3_test=setdiff(1:len3,num3_trainval); %剩下的作为test集
fid=fopen(strcat(path3, '_trainval.txt'),'a+');
for i=1:length(num3_trainval)
s = sprintf('%s',file3(num3_trainval(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path3, '_train.txt'),'a+');
for i=1:length(num3_train)
s = sprintf('%s',file3(num3_train(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path3, '_val.txt'),'a+');
for i=1:length(num3_val)
s = sprintf('%s',file3(num3_val(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
fid=fopen(strcat(path3, '_test.txt'),'a+');
for i=1:length(num3_test)
s = sprintf('%s',file3(num3_test(i)+2).name);
fprintf(fid,[s(1:length(s)-4) '\n']);
end
fclose(fid);
5.2加入自己的数据集
在代码的darknet目录下新建VOCdevkit文件夹,然后把刚才制作的VOC2007文件夹拷贝到该文件夹下。有的读者可能了解过YOLOV3的label,YOLOV3的label标注的一行五个数分别代表类别(从 0 开始编号), BoundingBox 中心 X 坐标,中心 Y 坐标,宽,高。这些坐标都是 0~1 的相对坐标。和我们刚才标注的label不同,因此我们需要下面的py文件帮我们转换label。
wget https://pjreddie.com/media/files/voc_label.py
这里需要修改两个地方,sets和classes,classes根据自己需要修改。
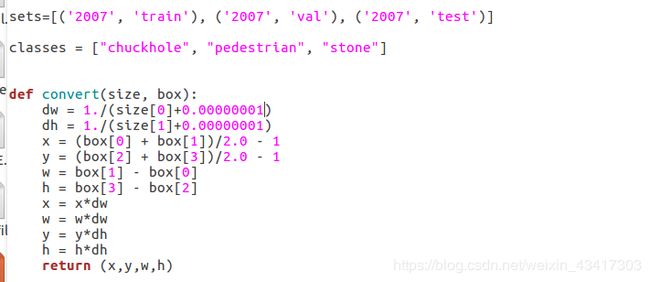
由于报错出现width 和hight有为0,我就在siza[0] 和size[1]后加0.00000001。不知道对后面训练有什么影响,暂时先这样处理吧。运行没有报错。
6.修改配置文件
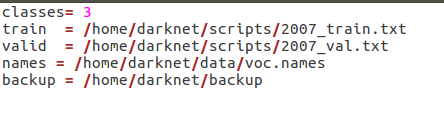
6.1 修改cfg/voc.data。
位于darknet/cfg文件夹下,分别将train、val的路径改为scripts文件夹下边的2007_train.txt、2007_val.txt的路径。back 修改为自己的路径,输出的权重信息将存储这个文件内。
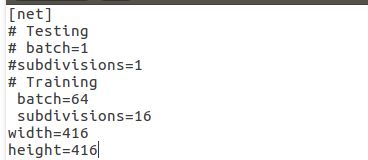
6.2修改参数文件cfg/yolov3-voc.cfg,
Class是类别数
Filters = 3*(class + 5)
该文件共有六处需要修改
位于605行 611行,689行 695行,773行 779行
参数文件开头的地方可以选训练的batchsize,要注意! Testing注释掉 打开Training
6.3修改voc.names文件
7.训练模型
./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg darknet53.conv.74
发生一个错误,并解决
 又发生错误,cuda显存不足
又发生错误,cuda显存不足

需要修改所使用的模型cfg文件中的subdivision的参数。
解决方法:由subdivisions=8改成subdivisions=16,64等,继续运行
哈哈,又报错了
继续改呀,这是因为voc.data文件中的路径不是绝对路径,找不到文件。只要打开voc.data(在cfg文件夹下)把两个路径改为如下形式(根据自己实际情况)即可:
train = /home/你的用户名/darknet/scripts/2018_train.txt
valid = /home/你的用户名/darknet/scripts/2018_val.txt
然而还报错,还是一大堆,我,,,我再坚持下。。
 发现问题所在了,被自己蠢哭了。我的数据集图片里有一部分是自己收集的,我做的是jpg格式。还有一部分是直接引用别人的,当时没注意观察是png格式的。而前面生成的文件名都是需要jpg格式的,故这里有一部分文件打不开。
发现问题所在了,被自己蠢哭了。我的数据集图片里有一部分是自己收集的,我做的是jpg格式。还有一部分是直接引用别人的,当时没注意观察是png格式的。而前面生成的文件名都是需要jpg格式的,故这里有一部分文件打不开。
8 训练注意问题
8.1 训练参数说明
终于可以正常训练了,上张训练过程的截图。训练默认的是前10000轮每1000轮保存一次模型,10000轮后每10000轮保存一次模型。可以修改examples/detector.c文件的138行。修改完重新编译一下,在darknet目录下执行make。

Region xx:cfg文件中yolo-layer的索引;
Avg IOU: 当前迭代中,预测的box与标注的box的平均交并比,越大越好,期望数值为1;
Class:标注物体的分类准确率,越大越好,期望数值为1;
obj:越大越好,期望数值为1;
No obj:越小越好;
.5R:以IOU=0.5为阈值时候的recall; recall = 检出的正样本/实际的正样本
0.75R:以IOU=0.75为阈值时候的recall;
count:正样本数目
9216: 指示当前训练的迭代次数
0.071332: 是总体的Loss(损失)
0.42692 avg: 是平均Loss,这个数值应该越低越好,一般来说,一旦这个数值低于0.060730 avg就可以终止训练了。也可当看到平均损失0.xxxxxx avg在多次迭代时不再减少时,停止训练。
0.000100 rate: 代表当前的学习率,是在.cfg文件中定义的。
11.317444 seconds: 表示当前批次训练花费的总时间。
589824 images: 这一行最后的这个数值表示到目前为止,参与训练的图片的总量。
在Region 82 Avg IOU、Region 94 Avg IOU、Region 106 Avg IOU中出现很多nan
在训练过程中,nan的屏幕占比30%是正常的,如果太大,全是nan,则就是训练出了问题
解决方法一:在显存允许的情况下,可以适当增加batch(darknet-master/yolov3-voc.cfg中的batch)的大小(要视自己数据集 的大小情况来增加batch,不能盲目的改大),这样能够一定程度减少nan的出现。
解决方法二:增加数据集的规模。若是对于10类以内的图片,500张以内的训练集未必是太少了,因此可以增加数据集,实在不 行的话就进行数据增强,把数据集扩展到原来的几倍到几十倍不等。
8.2 训练的暂定与继续
不保存训练日志的训练执行命令
./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg scripts/darknet53.conv.74
保存训练日志的训练执行命令
./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg scripts/darknet53.conv.74 | tee train_yolov3-voc.log
ubuntu系统下,在训练终端处,使用ctrl+c终止训练。
在终端输入一下命令,接着上一步停止处的训练状态继续训练
./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc.backup
临时暂停: ctrl+z 暂停训练,fg继续训练。
8.3 训练日志的可视化
(1)如果在训练的时候已经保存了训练日志,可以使用以下python脚本对训练日志进行可视化,得loss变化曲线和Avg IOU曲线(Avg IOU是交并比,标记的框和预测的框重复的部分除以他们的和,这个值越接近1越好)
visualization_train_yolov3-voc_log.py
# -*- coding: utf-8 -*-
# @Func :yolov3 训练日志可视化,把该脚本和日志文件放在同一目录下运行。
import pandas as pd
import matplotlib.pyplot as plt
import os
# ==================可能需要修改的地方=====================================#
g_log_path = "train_yolov3-voc.log" # 此处修改为你的训练日志文件名
# ==========================================================================#
def extract_log(log_file, new_log_file, key_word):
'''
:param log_file:日志文件
:param new_log_file:挑选出可用信息的日志文件
:param key_word:根据关键词提取日志信息
:return:
'''
with open(log_file, "r") as f:
with open(new_log_file, "w") as train_log:
for line in f:
# 去除多gpu的同步log
if "Syncing" in line:
continue
# 去除nan log
if "nan" in line:
continue
if key_word in line:
train_log.write(line)
f.close()
train_log.close()
def drawAvgLoss(loss_log_path):
'''
:param loss_log_path: 提取到的loss日志信息文件
:return: 画loss曲线图
'''
line_cnt = 0
for count, line in enumerate(open(loss_log_path, "rU")):
line_cnt += 1
result = pd.read_csv(loss_log_path, skiprows=[iter_num for iter_num in range(line_cnt) if ((iter_num < 500))],
error_bad_lines=False,
names=["loss", "avg", "rate", "seconds", "images"])
result["avg"] = result["avg"].str.split(" ").str.get(1)
result["avg"] = pd.to_numeric(result["avg"])
fig = plt.figure(1, figsize=(6, 4))
ax = fig.add_subplot(1, 1, 1)
ax.plot(result["avg"].values, label="Avg Loss", color="#ff7043")
ax.legend(loc="best")
ax.set_title("Avg Loss Curve")
ax.set_xlabel("Batches")
ax.set_ylabel("Avg Loss")
def drawIOU(iou_log_path):
'''
:param iou_log_path: 提取到的iou日志信息文件
:return: 画iou曲线图
'''
line_cnt = 0
for count, line in enumerate(open(iou_log_path, "rU")):
line_cnt += 1
result = pd.read_csv(iou_log_path, skiprows=[x for x in range(line_cnt) if (x % 39 != 0 | (x < 5000))],
error_bad_lines=False,
names=["Region Avg IOU", "Class", "Obj", "No Obj", "Avg Recall", "count"])
result["Region Avg IOU"] = result["Region Avg IOU"].str.split(": ").str.get(1)
result["Region Avg IOU"] = pd.to_numeric(result["Region Avg IOU"])
result_iou = result["Region Avg IOU"].values
# 平滑iou曲线
for i in range(len(result_iou) - 1):
iou = result_iou[i]
iou_next = result_iou[i + 1]
if abs(iou - iou_next) > 0.2:
result_iou[i] = (iou + iou_next) / 2
fig = plt.figure(2, figsize=(6, 4))
ax = fig.add_subplot(1, 1, 1)
ax.plot(result_iou, label="Region Avg IOU", color="#ff7043")
ax.legend(loc="best")
ax.set_title("Avg IOU Curve")
ax.set_xlabel("Batches")
ax.set_ylabel("Avg IOU")
if __name__ == "__main__":
loss_log_path = "train_log_loss.txt"
iou_log_path = "train_log_iou.txt"
if os.path.exists(g_log_path) is False:
exit(-1)
if os.path.exists(loss_log_path) is False:
extract_log(g_log_path, loss_log_path, "images")
if os.path.exists(iou_log_path) is False:
extract_log(g_log_path, iou_log_path, "IOU")
drawAvgLoss(loss_log_path)
drawIOU(iou_log_path)
plt.show()
(2)将上述python脚本文件和训练日志放在同一目录下,打开此目录下的终端,运行上述.py文件可以得到loss变化曲线和Avg IOU变化曲线。同时,在当前目录下生成了train_log_iou.txt和train_log_loss.txt文件。
9 转化c++代码
9.1 图像转换和缩放
yolo采用自定义的image格式进行图像读取和处理,而一般我们工程中使用较多的是OpenCV或者指向图像数据的指针,因此此处先对图像转换和缩放操作进行修改,代码如下:
imprcoess.h
#ifndef IMPROCESS_H
#define IMPROCESS_H
#includeimprcoess.cpp
#include其中,imgConvert函数将OpenCV的图像由RGBRGBRGB…转化为yolo的RRRGGGBBB…格式(由代码可知,yolo输入图像的像素取值范围为0~1)。imgResize函数将图像缩放到cfg指定的网络输入的大小。代码修改自yolo的源码,将其image格式改为我们需要的指针形式。
9.2 调用darknet
为了让代码跑通,我们首先用OpenCV读取视频,然后将OpenCV的图像转为指针指向的数据格式(如果想直接采用OpenCV可自行修改)。模型是darknet官网上的模型,当然你可以换成自己训练的模型。代码如下:
darknet.h 文件在include目录下已包含,此处不再列出。
main.cpp
在这里插入代码片
```#include<iostream>
#include
namedWindow("video",0);
imshow("video",frame);
int c=waitKey(30);
if((char)c==27)
break;
else if(c>=0)
waitKey(0);
free(srcImg);
free(resizeImg);
}
free_network(net);
capture.release();
return 1;
}
待续。。。。。