移动咪咕盒子红外遥控驱动
最近入手了一块显示屏,又惊喜的发现移动咪咕盒子一直落灰,(反正盒子没破解也不能看电视),那给我的讯为4412开发板刷个安卓系统,写个红外遥控驱动烧进去,这样就能用咪咕盒子的遥控器看电视了。说干就干,开动啦
首先,了解下红外遥控器接收头引脚 ,从左往右,引脚依次是OUT,GND,VCC

红外遥控接收的整个过程是你拿着一个红外遥控器对准红外接收头按时,红外接收头的OUT引脚将会如何变化?这个是由你按下了遥控器哪个键决定的。因为它只是起到一个解码的作用。在当下,我国基本上是用的遥控器都是遵循NEC的编码方式。所以,我们就需要知道NEC红外遥控的编码方式了,然后才能在驱动程序里解码遥控器的信号。
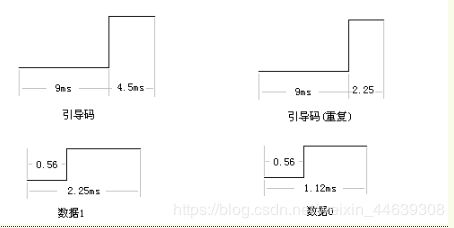
遥控器发送的数据码由以下部分组成:引导码,8位的用户码,8位用户码的补码,8位的按键值,8位按键值的补码;

引导码及数据的定义如下图所示,当一直按住一个按钮的时候,会隔110ms左右发一次引导码(重复),并不带任何数据
解码的过程如下:遥控器的解码是在中断处理函数中完成的,当MCU 的中断引脚发生电平变化时,会引发中断;
void interrupt NEC_IR(void)
{
NEC遥控器中断处理
}
NEC遥控器中断里面处理红外接收头解码的代码如下:
#define UP 1
#define DOWN 2
unsigned char IR_STATE = 0;//信号处理的状态
unsigned char IR_CAPTURE_VAL = DOWN;//默认起始为低电平
unsigned char IR_BIT_POSITION = 0;
unsigned char IR_DATA[4];
long long IR_CAPTURE_TIME = 0;
time_t last_time;//上次的时间单位秒
suseconds_t last_time_us;//上次的时间单位微秒
#if 1
do_gettimeofday(&tv_time);//linux获得系统时间的函数
IR_CAPTURE_TIME = ((tv_time.tv_sec - last_time) * 1000 * 1000) + (tv_time.tv_usec - last_time_us);//捕获高低电平的时间
last_time = tv_time.tv_sec;//把捕获触发的时间设置为上一次的时间
last_time_us = tv_time.tv_usec;
if (IR_STATE == 5)
return IRQ_HANDLED;
//printk("%d %d(%lld)\n", IR_CAPTURE_VAL, IR_STATE, IR_CAPTURE_TIME);
if (IR_CAPTURE_VAL == UP) //如果捕捉到上升沿
{
//printf("L:%d\n",IR_CAPTURE_TIME);
//如果低电平时间有9000us IR_STATE=1 引导码低电平9ms
if (7000 < IR_CAPTURE_TIME && IR_CAPTURE_TIME < 9500)
{
IR_STATE = 1;
}
else if (IR_STATE == 2)
{
if (300 < IR_CAPTURE_TIME && IR_CAPTURE_TIME < 700)
{
IR_STATE = 3;
}
else
{
IR_STATE = 0;
}
}
//如果低电平没有9ms.IR_STATE=4
else if (IR_STATE == 4)
{
IR_STATE = 5;
spend();
}
IR_CAPTURE_VAL = DOWN;
}
else
{
if (IR_STATE == 1)
{
//引导码9ms低电平之后如果是4.5ms的高电平则完成的读取
if (3000 < IR_CAPTURE_TIME && IR_CAPTURE_TIME < 6000)
{
IR_BIT_POSITION = 0;
IR_DATA[0] = 0;
IR_DATA[1] = 0;
IR_DATA[2] = 0;
IR_DATA[3] = 0;
IR_STATE = 2;
}
//如果引导码后是2.xms的高电平则是重复码,则直接标记读取完成
else if (1000 < IR_CAPTURE_TIME && IR_CAPTURE_TIME < 3000)
{
IR_STATE = 5;
//既然按下-松开才是一个完整的事件,那么就不需要判断是否重复了
spend();
}
}
else if (IR_STATE == 3)
{//0.56ms
if (300 < IR_CAPTURE_TIME && IR_CAPTURE_TIME < 700)
{
IR_DATA[IR_BIT_POSITION / 8] |= (0 << (IR_BIT_POSITION % 8));
}//1.69ms
else if (700 < IR_CAPTURE_TIME && IR_CAPTURE_TIME < 1900)
{
IR_DATA[IR_BIT_POSITION / 8] |= (1 << (IR_BIT_POSITION % 8));
}
if (IR_BIT_POSITION == 31)
{
//全部读取完成
IR_STATE = 4;
}
else
{
IR_STATE = 2;
IR_BIT_POSITION++;
}
}
IR_CAPTURE_VAL = UP;
}
#endif
好了,现在已经把接收到的遥控红外信号解码了,然后我们进行测试,分别按下遥控器的每个按键,串口控制台会输出对应的键值。现在我们要对收到的解码后的编码进行处理了代码如下图:
static void spend(void)
{
int i;
//如果数据位不等于数据位的反码,则接收错误
if (IR_DATA[2] != (IR_DATA[3] ^ 0xff))
{
//不一致可能是错误数据 直接丢弃
printk("verified failed,drop data 0x%02X 0x%02X(%d%d%d%d%d%d%d%d %d%d%d%d%d%d%d%d)\n",
(IR_DATA[2]),
(IR_DATA[3]),
((IR_DATA[2] >> 7) & 0x01),
((IR_DATA[2] >> 6) & 0x01),
((IR_DATA[2] >> 5) & 0x01),
((IR_DATA[2] >> 4) & 0x01),
((IR_DATA[2] >> 3) & 0x01),
((IR_DATA[2] >> 2) & 0x01),
((IR_DATA[2] >> 1) & 0x01),
((IR_DATA[2] >> 0) & 0x01),
((IR_DATA[3] >> 7) & 0x01),
((IR_DATA[3] >> 6) & 0x01),
((IR_DATA[3] >> 5) & 0x01),
((IR_DATA[3] >> 4) & 0x01),
((IR_DATA[3] >> 3) & 0x01),
((IR_DATA[3] >> 2) & 0x01),
((IR_DATA[3] >> 1) & 0x01),
((IR_DATA[3] >> 0) & 0x01));
}
else//正确就进行上报系统
{
printk("[0x%02X] ", IR_DATA[2]);
for (i = 0; i < ARRAY_SIZE(key_event); i++)
{//如果键值等于数据码,就上报
if (key_event[i].ir_code == IR_DATA[2])
{
//上报按下事件
input_event(buttons_dev, EV_KEY, key_event[i].key_code, 1);
input_sync(buttons_dev);
//------------------------------------------------------
del_timer(&ir_timer); //删除上次的超时函数
ir_timer.expires = jiffies + 25; //设定超时时间,250毫秒
ir_timer.data = key_event[i].key_code; //传递给定时器超时函数的值
ir_timer.function = ir_timer_function; //设置定时器超时函数
add_timer(&ir_timer); //添加定时器,定时器开始生效
// input_event(buttons_dev, EV_KEY, key_event[i].key_code, 0);
// input_sync(buttons_dev);
break;
}
}
}
IR_STATE = 0;
}
/**
* 超时函数
*
* 如果执行到此函数说明规定时间内没有新的按键信号
* 则上报给系统松开按键的事件
*/
static void ir_timer_function(unsigned long key_code)
{
//------------------------------------------------------
//上报一个松开事件
input_event(buttons_dev, EV_KEY, key_code, 0);
input_sync(buttons_dev);
}
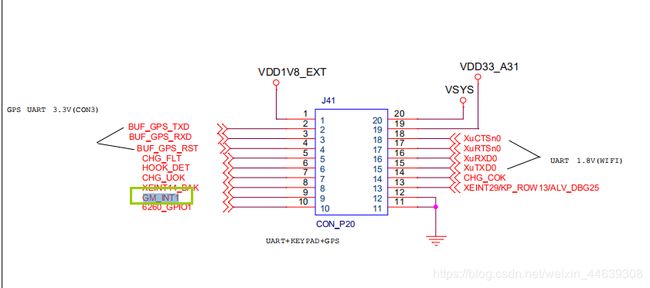
好了,现在主要程序已经讲完了,接下来连接硬件,首先查找原理图,找到一个有中断的GPIO口,对应找出核心板的控制引脚,如下图所示。然后连接接收头到开发板上。
然后连接好开发板,进行驱动设备注册,使用命令“vim arch/arm/mach-exynos/mach-itop4412.c”,打开平台 文件,添加注册
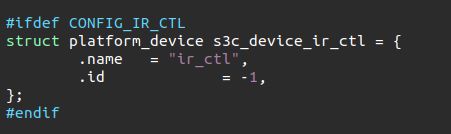
接着到 menuconfig 中将其配置上,使用命令“make menuconfig”,进入“Device Drivers —>”→“Character devices —>”→“Enable IR config”,如下图所 示,配置上宏定义“IR_CTL”。
配置后保存退出。这样就确认了宏定义“IR_CTL”已经出现。 接着再次打开“arch/arm/mach-exynos/mach-itop4412.c”平台文件,再添加设备注册。

保存退出,重新编译内核,烧写到开发板。 开发板启动之后,使用命令“ls /sys/devices/platform/”可以查看到新注册的 IR 设 备。最后加载驱动模块“insmod /mnt/sdcard/ir.ko”.按遥控器按键,惊喜的发现可以控制安卓啦,安卓里面安个当贝桌面和电视家APP,这样子就可以看用遥控器遥控选择电视频道啦!美滋滋~
完整代码见下图:
/*以后写驱动可以讲头文件一股脑的加载代码前面*/
#include