传统车道线检测
来源:https://github.com/rslim087a/road-video/blob/master/test2.mp4
https://github.com/rslim087a/road-image
1、Convert Image to grayscale and Reduce Noise
#灰度处理
gray = cv2.cvtColor(lane_image,cv2.COLOR_RGB2GRAY)
#高斯模糊
blur = cv2.GaussianBlur(gray,(5,5),0)模糊后图像:
2、Canny edge detection and finding lane lines regoin of interest
canny = cv2.Canny(blur,50,150)边缘检测图像:

需要的区域坐标:

#设定一个mask,只显示将需要的区域
def region_of_interest(image):
height = image.shape[0]
polygons = np.array([[(200,height),(1100,height),(550,250)]])
mask = np.zeros_like(image)
cv2.fillPoly(mask,polygons,255)
return mask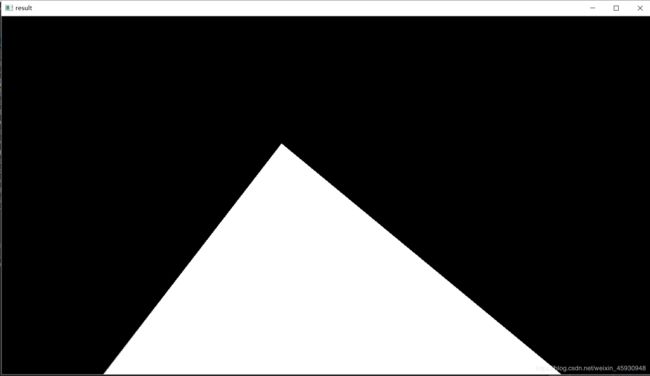
#将mask与canny图像合并
mask_image = cv2.bitwise_and(image,mask)
return mask_image
通过霍夫线变换画出车道直线
def display_lines(image,lines):
line_image = np.zeros_like(image)
if lines is not None:
for line in lines:
x1,y1,x2,y2 = line.reshape(4)
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)
return line_image
lines = cv2.HoughLinesP(cropped_image,2,np.pi/180,100,np.array([]),40,5)
line_image = display_lines(image,lines)
combo_image = cv2.addWeighted(image,0.8,line_image,1,1)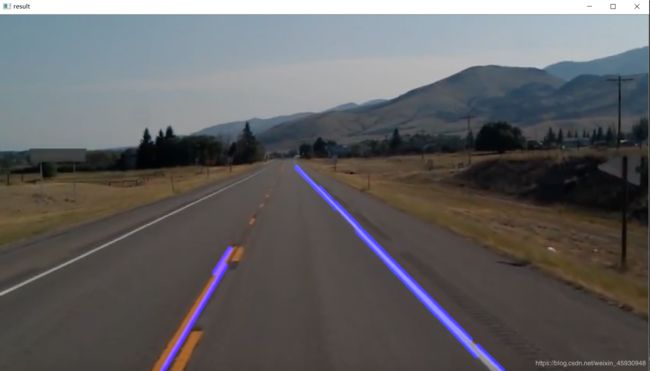
调整直线:
def average_slope_intercept(image,lines):
left_fit = []
right_fit = []
for line in lines:
x1,y1,x2,y2 = line.reshape(4)
#拟合多项式,并且返回斜率和截距
parameters = np.polyfit((x1,x2),(y1,y2),1) #‘1’代表一次多项式
#print(parameters)
slope = parameters[0]
intercept = parameters[1]
#左车道直线斜率小于0,右车道直线斜率大于0
if slope < 0 :
left_fit.append((slope,intercept))
else:
right_fit.append((slope,intercept))
#平均左车道线的斜率,平均右车道线的斜率
left_fit_average = np.average(left_fit,axis=0)
right_fit_averge = np.average(right_fit,axis=0)
# 返回的是该斜率直线的两个端点
left_line = make_coordinates(image,left_fit_average)
right_line = make_coordinates(image,right_fit_averge)
return np.array([left_line,right_line])
def make_coordinates(image,line_parameters):
# 确定直线的两个端点(x1,y1),(x2,y2)
slope,intercept = line_parameters
y1 = image.shape[0]
y2 = int(y1*(3/5))
x1 = int((y1 - intercept)/slope)
x2 = int((y2 - intercept) / slope)
return np.array([x1,y1,x2,y2])
# 返回的两个端点
averaged_lines = average_slope_intercept(image,lines)
#将检测到的直线在图片上画出
line_image = display_lines(image,averaged_lines)
combo_image = cv2.addWeighted(image,0.8,line_image,1,1) 
import cv2
import numpy as np
import matplotlib.pyplot as plt
def canny_image(image):
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
canny = cv2.Canny(blur, 50, 150)
return canny
def region_of_interest(image):
height = image.shape[0]
polygons = np.array([[(200,height),(1100,height),(550,250)]])
mask = np.zeros_like(image)
cv2.fillPoly(mask,polygons,255)
mask_image = cv2.bitwise_and(image,mask)
return mask_image
def display_lines(image,lines):
line_image = np.zeros_like(image)
if lines is not None:
for x1,y1,x2,y2 in lines:
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)
return line_image
def average_slope_intercept(image,lines):
left_fit = []
right_fit = []
for line in lines:
x1,y1,x2,y2 = line.reshape(4)
#拟合多项式,并且返回斜率和截距
parameters = np.polyfit((x1,x2),(y1,y2),1) #‘1’代表一次多项式
#print(parameters)
slope = parameters[0]
intercept = parameters[1]
#左车道直线斜率小于0,右车道直线斜率大于0
if slope < 0 :
left_fit.append((slope,intercept))
else:
right_fit.append((slope,intercept))
#平均左车道线的斜率,平均右车道线的斜率
left_fit_average = np.average(left_fit,axis=0)
right_fit_averge = np.average(right_fit,axis=0)
# 返回的是该斜率直线的两个端点
left_line = make_coordinates(image,left_fit_average)
right_line = make_coordinates(image,right_fit_averge)
return np.array([left_line,right_line])
def make_coordinates(image,line_parameters):
# 确定直线的两个端点(x1,y1),(x2,y2)
slope,intercept = line_parameters
y1 = image.shape[0]
y2 = int(y1*(3/5))
x1 = int((y1 - intercept)/slope)
x2 = int((y2 - intercept) / slope)
return np.array([x1,y1,x2,y2])
'''''''''''''''''''''''''''''''''''''''''''''
图像检测
'''''''''''''''''''''''''''''''''''''''''''''
image = cv2.imread('test_image.jpg')
canny = canny_image(image)
#用plt求出所需区域的坐标
# plt.imshow(canny)
# plt.show()
#从边缘检测图像中画出车道线
cropped_image = region_of_interest(canny)
#霍夫线变换,检测直线
lines = cv2.HoughLinesP(cropped_image,2,np.pi/180,100,np.array([]),40,5)
# 返回的两个端点
averaged_lines = average_slope_intercept(image,lines)
#将检测到的直线在图片上画出
line_image = display_lines(image,averaged_lines)
combo_image = cv2.addWeighted(image,0.8,line_image,1,1) #cv2.addWeighted图像混合叠加
cv2.imshow('result',combo_image)
cv2.waitKey(0)
'''''''''''''''''''''''''''''''''''''''''''''
图像检测
'''''''''''''''''''''''''''''''''''''''''''''
'''''''''''''''''''''''''''''''''''''''''''''
视频检测
'''''''''''''''''''''''''''''''''''''''''''''
# cap = cv2.VideoCapture('test2.mp4')
# while True:
# ret, frame = cap.read()
# canny = canny_image(frame)
# # 从边缘检测图像中画出车道线
# cropped_image = region_of_interest(canny)
# # 霍夫线变换,检测直线
# lines = cv2.HoughLinesP(cropped_image, 2, np.pi / 180, 100, np.array([]), 40, 5)
# # 返回的两个端点
# averaged_lines = average_slope_intercept(frame, lines)
# # 将检测到的直线在图片上画出
# line_image = display_lines(frame, averaged_lines)
# combo_image = cv2.addWeighted(frame, 0.8, line_image, 1, 1) # cv2.addWeighted图像混合叠加
# cv2.imshow('result', combo_image)
# if cv2.waitKey(1) & 0xff == ord('q'):
# break
# cap.release()
# cv2.destroyAllWindows()
'''''''''''''''''''''''''''''''''''''''''''''
视频检测
'''''''''''''''''''''''''''''''''''''''''''''