ROS学习心得——安装篇——ROS安装
ROS学习心得——安装篇——ROS安装
FOR THE SIGMA
FOR THE GTINDER
FOR THE ROBOMASTER
简介:
ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。很多机器人开发都围绕这这一平台。
关于kinetic与其他ros版本的配置实质是一样,本篇将以ROS-kinetic为大家提供示范。
操作系统版本:Ubuntu16.04(注意:不同的ROS版本对应相应的Ubuntu操作系统版本的切勿安装错误)
http://www.ubuntu.org.cn/download/desktop 桌面版ubuntu16.04 下载
http://mirror.pnl.gov/releases/xenial/ Ubuntu系列镜像文件下载列表(amd64为64位,i386为32位)
ROS版本:kinetic-火箭龟
http://www.ros.org/ ROS官网
http://wiki.ros.org/kinetic/Installation ROS-kinetic下载地址(wiki里面的教程很不错的)
虚拟机版本:VMware15(注意:如果可以的话尽量不要用虚拟机,容易出现崩坏显现,为啥作者要用呢?当然是没钱啊!>_<
https://my.vmware.com/cn/web/vmware/info/slug/desktop_end_user_computing/vmware_workstation_pro/15_0
15版下载,密匙百度
国内源推荐:阿里云、sohu、cn99
下面为各个版本对于操作系统
| ROS发布时间与维护时间 | ROS版本 | linux版本 |
|---|---|---|
| 2018.3-2023.4 | melodic | ubuntu18.04 |
| 2016.3-2021.4 | kinetic | ubuntu16.04 |
| 2014.7-2019. 4 | Indigo | ubuntu14.04 |
具体参考:http://wiki.ros.org/Distributions
安装步骤
1.将时间误差缩短到最小
sudo apt-get install -y chrony ntpdate
sudo ntpdate -q ntp.ubuntu.com
2.在ros-latest.list添加ROS版本库
sudo sh -c 'echo''deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.设置公钥(Key)
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
如果无法连接上述服务器,可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80
4.更新软件包索引
sudo apt-get update
sudo apt-get upgrade -y
5.安装ROS Kinetic Kame(完整版-包括很多opencv的包之类的)
sudo apt-get install ros-kinetic-desktop-full
6.安装所有额外的rqt相关的功能包
sudo apt-get install ros-kinetic-rqt*
7.初始化rosdep 在使用ROS之前必须要初始化rosdep
sudo rosdep init
rosdep update
8.安装rosinstall(启动roscore的核心) 在这里说一句,在配置环境变量时万万不可因错误,随意使用rm bashrc指令否则很容易造成环境丢失(虽然有找回的方法-extundelete安装),到时候可能只有重新配置了。
sudo apt-get install python-rosinstall
9.安装我们程序运行需要的服务
sudo apt-get install ros-kinetic-serial
sudo apt-get -y install ros-kinetic-slam-gmapping
sudo apt-get -y install ros-kinetic-map-server
sudo apt-get -y install ros-kinetic-amcl
10.配置环境变量:
echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc
source ~/.bashrc
11.测试安装结果
roscore (新终端)
看最后有没有
setting /run_id to b243608a-2524-11e8-8f6c-342387e5d341
process[rosout-1]: started with pid [7671]
started core service [/rosout]
有就成功了
下列是你以后学习时常用的强烈建议记下来
12.创建并初始化工作目录
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
13.加载与catkin构建系统相关的环境文件
source ~/catkin_ws/devel/setup.bash
好了现在开始的游戏吧
1.安装示例
sudo apt-get install ros-kinetic-turtlesim
2.在三个不同的终端分别执行以下三个指令:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
3.结果图
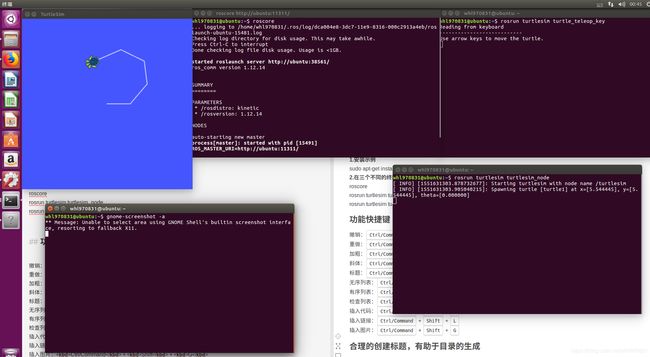 利用上下左右键控制小海龟行走。
利用上下左右键控制小海龟行走。
最后总结
对于ROS的安装其实是挺容易的,并没有想象中的难,一般来说30分钟-60分钟以内
值得一提的是我在ROS全球维护者中看到了创造出YOLO算法的作者,意外意外。