从不同的位置移动物体,分解动作为
- 将夹子从垂直方向移入物体
- 收拢夹子
- 垂直搬移物体到目标位置
- 松开夹子
- 从物体中退出并移动到新物体上方
2234.gif
MOVEJ动作的使用
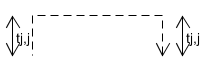
image.png
- 移入物体中间和从物体中移除时使用的是MOVEJ动作,限定在竖直方向移出,移入
code
两种实现方式:
- 串行:前一个动作执行完成后,再下载下一个动作,然后执行
- 并行:前一个动作执行过程中开始下载下一个动作到不同的空间中
- 4个动作分别放置在了4个不同的空间中
- 张开夹子
- 闭合夹子
- 搬移物体-去程
- 搬移物体-回程
- 移动过程是一个循环,每次循环中计算路径的起止位置
# -*- coding = utf-8 -*-
import sinanju
zeropt = [ 255,0,512, 30 ]
P0=[ 200, 100, 160,0 ]
P1=[ 200, -100, 160,0 ]
# width, depth, height
cubic = ( 100, 100, 50 )
# cubic = ( 100, 100, 60 )
cubicCount = 3
# open,close
handAction=( 150, 110 )
openPage = 8
closePage = 9
handTime = 1
moveTime = 2
jSetting=( 100, 1 )
def serialDock():
# connect
robo = sinanju.Sinanju( "Sinanju2" )
idn = robo.IDN
print(idn)
# prepare the hand
robo.preMove( 0, openPage,
(0,0,0, handAction[1] ),
(0,0,0, handAction[0] ),
handTime
)
robo.waitEnd( 0, openPage )
robo.preMove( 0, closePage,
(0,0,0, handAction[0] ),
(0,0,0, handAction[1] ),
handTime
)
robo.waitEnd( 0, closePage )
dstPt = zeropt
dstPt[3] = 0
for aimIndex in range( cubicCount-1, -1, -1 ):
# print( aimIndex, P0 )
# move to first
aimPt = P0[:]
aimPt[ 2 ] = aimPt[2] + cubic[2] * ( aimIndex ) + cubic[2]/2
print( dstPt, aimPt )
robo.movej( 0, 0, dstPt, aimPt, moveTime, jSetting[0], jSetting[1] )
robo.waitIdle( 0, 0 )
# drag
robo.call( 0, closePage )
robo.waitIdle( 0, closePage )
# move the dst
dstPt = P1[:]
dstPt[2] = dstPt[2] + cubic[2] * ( cubicCount - 1 - aimIndex ) + cubic[2]/2
print( aimPt, dstPt )
robo.movej( 0, 0, aimPt, dstPt, moveTime, jSetting[0], jSetting[1] )
robo.waitIdle( 0, 0 )
# drop
robo.call( 0, openPage )
robo.waitIdle( 0, openPage )
robo.movej( 0,0, dstPt, zeropt, moveTime, jSetting[0], jSetting[1] )
robo.waitIdle( 0, 0 )
def parallelDock():
# connect
robo = sinanju.Sinanju( "Sinanju2" )
idn = robo.IDN
print(idn)
# prepare the hand
robo.preMove( 0, openPage,
(0,0,0, handAction[1] ),
(0,0,0, handAction[0] ),
handTime
)
robo.waitEnd( 0, openPage )
robo.preMove( 0, closePage,
(0,0,0, handAction[0] ),
(0,0,0, handAction[1] ),
handTime
)
robo.waitEnd( 0, closePage )
dstPt = zeropt
dstPt[3] = 0
# first
aimIndex = cubicCount - 1
aimPt = P0[:]
aimPt[ 2 ] = aimPt[2] + cubic[2] * ( aimIndex ) + cubic[2]/2
print( dstPt, aimPt )
robo.preMovej( 0, 0, dstPt, aimPt, moveTime, jSetting[0], jSetting[1] )
for aimIndex in range( cubicCount-1, -1, -1 ):
# print( aimIndex, P0 )
if ( aimIndex != cubicCount - 1 ):
robo.waitIdle( 0, openPage )
robo.waitEnd( 0, 0 )
robo.call( 0, 0 )
# prog b
dstPt = P1[:]
dstPt[2] = dstPt[2] + cubic[2] * ( cubicCount - 1 - aimIndex ) + cubic[2]/2
print( aimPt, dstPt )
robo.preMovej( 0, 2, aimPt, dstPt, moveTime, jSetting[0], jSetting[1] )
# drag
robo.waitIdle(0,0)
robo.call( 0, closePage )
robo.waitIdle( 0, closePage )
# move the dst
robo.waitEnd( 0, 2 )
robo.call( 0, 2 )
# prog a
aimPt = P0[:]
aimPt[ 2 ] = aimPt[2] + cubic[2] * ( aimIndex - 1 ) + cubic[2]/2
print( dstPt, aimPt )
robo.preMovej( 0, 0, dstPt, aimPt, moveTime, jSetting[0], jSetting[1] )
# drop
robo.waitIdle( 0, 2 )
robo.call( 0, openPage )
robo.movej( 0,0, dstPt, zeropt, moveTime, jSetting[0], jSetting[1] )
robo.waitIdle( 0, 0 )
if __name__ == "__main__":
# seiralDock()
parallelDock()