ROS小白学习历程(slam)--使用hector_slam建图
笔者在实践过程中在Slam建图这一块卡了许久,网上教程基本都是复制代码,对初学者很不友好,有的也不正确,笔者肝出来后想提供一篇详细的博客,帮助后来人。
此博客注重原理,使用衫川雷达delta 3i,其他雷达一样的操作原理。
首先了解hector_slam功能包,ros_wiki一波。
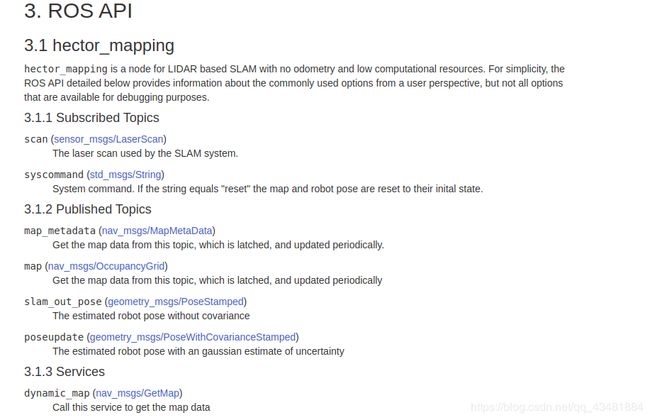
首先了解话题的发布订阅,需要订阅/scan话题,即激光雷达发出的数据。
中间参数可自行了解。
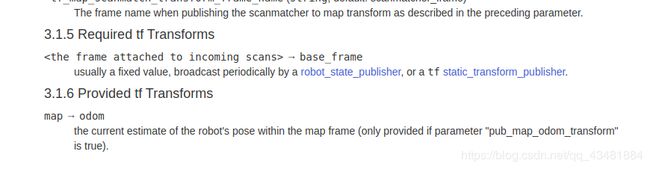
3.1.5提出需要laser 到 base_link的tf变换。
3.1.6提出需要提供map到odom的tf变换。
综上,我们得知,我们需要提供三样东西。
1、配置hector
首先,下载hector_slam功能包,
sudo apt-get install ros-kinetic-hector-slam
在你的激光雷达功能包(这个一般厂家会提供,其他常见雷达可在网上搜索教程)中添加hector.launch,配置hector的具体参数。
<launch>
<node pkg = "hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="base_link" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="/scan"/>
</node>
</launch>
我们可以看到以上launch文件已经包含:
<param name="pub_map_odom_transform" value="true"/>
这一条代码完成了map到odom的tf变换,ok,完成一项。
下面设置map_frame、base_frame、odom_frame。
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
map_frame默认=“map”。
因为hector不需要里程计信息,所以将base_frame、odom_frame都设为base_link。
那么问题来了,我在launch文件里面设置了参数 baseframe=base_link,请问base_link到底是什么?说到底,还是需要我们自己提供urdf文件。
2、提供urdf文件
如果仅是学习slam用,可随便选一个urdf模型。博主采用的是古月的mbot_description里的mbot_with_laser。
将urdf文件粘贴到你的激光雷达功能包下,并修改:
Cmake.list中
find_package(catkin REQUIRED COMPONENTS
roscpp
rosconsole
sensor_msgs
urdf
xacro
)
package.xml中:
<build_depend>urdf</build_depend>
<build_depend>xacro</build_depend>
<run_depend>urdf</run_depend>
<run_depend>xacro</run_depend>
注意版本不同。
编写(复制)launch文件:
view_mbot.launch:
<launch>
<param name="robot_description" textfile="$(find delta_lidar)/urdf/mbot_with_laser.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d /opt/ros/kinetic/share/rviz/default.rviz" required="true" />
</launch>
运行launch文件,那么现在urdf的参数就到参数服务器了,也就是有了base_link。
下面进行laser到base_link的坐标变换。
3、laser_link到base_link的tf变换
这个可在launch文件中用一行就完成:
<node pkg="tf" type="static_transform_publisher" name="laser_broadcaster"
args="0 0 0.105 0 0 0 /base_link /laser_link 100" />
args="0 0 0.105 0 0 0“是laser_link到base_link的变换关系,后面两个参数分别是源坐标系、目标坐标系。
注意:这里的参数应与你的urdf文件里的名称对应!
比如,你的urdf文件里的laser的名称叫”laser“,在launch文件中你写的是”lase_link“,这是不行的。
有的激光雷达的launch文件里面可以设置默认的frame_id:
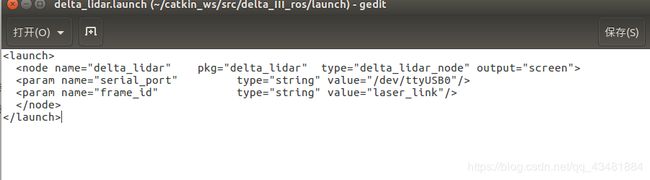
这里面也要修改成对应的参数。
现在完成了laser_link到base_link的tf变换。
4、scan话题
还差/scan话题,当激光雷达节点运行起来后,默认会发布scan话题,如果有不一样,可以先运行起来,再用rostopic list查看具体名称,再到launch文件中修改参数:
<param name="scan_topic" value="/scan"/>
到此,hector所需所有要求都已满足,跑起来吧!
5、运行
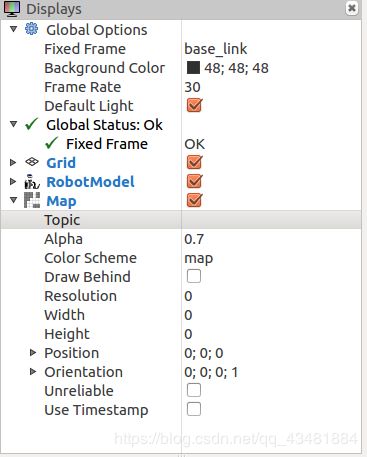
1、打开urdf的rviz
roslaunch delta_lidar view_mbot.launch
2、启动激光雷达
roslaunch delta_lidar delta_lidar.launch
3、启动hector节点
roslaunch delta_lidar hector.launch



最后建图效果:
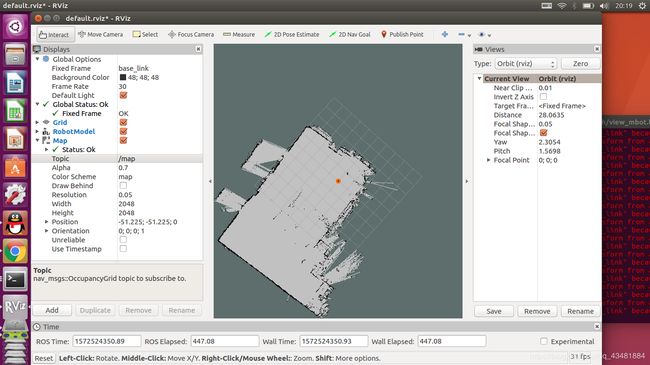
希望可以帮到大家!