1 投影空间
欧氏空间,主要描述角度和形状,针对的是理想几何物体。例如,两条 ∥ 线永不相交,或交于无穷远点 (虚拟的点)。中学时代的 “平面与立体几何”,便属于欧式空间。
投影空间,指实际的物体,被相机拍摄后,成像所在的空间,常用于计算机视觉中。在投影空间里,两条直线必然会相交于一点,只不过当这两条线平行时,交点为无穷远。

如图所示,现实中的两条铁轨,成像在投影空间时,相交于某一点,也即无穷远点;但在欧氏空间中,无穷远点是理想点,并没有实际意义。
这样,就需要一种新的表示方法 -- 齐次坐标,将欧氏空间的无穷远点,与投影空间中有实际意义的点,建立起映射关系。
2 齐次坐标
在平面几何里,采用笛卡尔坐标,则一个点可表示为 $(x, y)^{T}$。如果增加一个坐标值,表示为 $(x, y, 1)^{T}$,且约定 ($x, y, 1)^{T}$ 和 $(kx, ky, k)^{T}$ 表示的是同一个点 (其中 k ≠ 0),
则这种用一个 N+1 维的向量,来表示 N 维向量的方法,称为齐次坐标法。
这样,由齐次坐标 $(x, y, w)$,可推导出笛卡尔坐标 $ (\dfrac{x}{w}, \dfrac{y}{w})$
2.1 无穷远点
欧式空间中,两条平行线方程组,如下:
$\begin{cases} AX + BY + C = 0 \\ AX + BY + D = 0 \end{cases} $ ,其中 C ≠ D
齐次坐标点$(x, y, w)^{T}$ 与 欧氏空间点 $(X, Y)^{T}$ 的对应关系为: $ X = \dfrac{x}{w}, Y = \dfrac{y}{w}$,代入上面方程组得:
$\begin{cases} A\dfrac{x}{w} + B\dfrac{y}{w} + C = 0 \\ A\dfrac{x}{w} + B\dfrac{y}{w} + D = 0 \end{cases} $ => $\begin{cases} Ax+ By + Cw = 0 \\ Ax+ By + Dw = 0 \end{cases} $ => $w = 0$
既然 w = 0,则齐次坐标为 $(x, y, 0)^{T}$,对应笛卡尔坐标 $(\dfrac{x}{0}, \dfrac{y}{0})^{T}$,表示的是无穷远点 $(∞, ∞)^{T}$
2.2 合并加法
点 $(x, y, z)^{T}$,经过伸缩和平移后,成为点 $ (x', y', z')^{T} = (r_{1}x+t_{1}, r_{2}y+t_{2}, r_{3}z+t_{3})^{T}$,该变换过程可用如下公式表示:
$\begin{bmatrix} x' \\ y' \\ z' \end{bmatrix} = \begin{bmatrix} r_{1} \\ r_{2} \\ r_{3} \end{bmatrix} \begin{bmatrix} x \\ y \\ z \end{bmatrix} + \begin{bmatrix} t_{1} \\ t_{2} \\ t_{3} \end{bmatrix} $
如果使用齐次坐标,则可将平移变换,转化为矩阵乘法,消除了上式中的矩阵加法
$\begin{bmatrix} x' \\ y' \\ z' \\1 \end{bmatrix} = \begin{bmatrix} r_{1} & 0 & 0 & t_{1} \\ 0 & r_{2} & 0 & t_{2} \\ 0 & 0 & r_{3} & t_{3} \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ 1\end{bmatrix} $
2.3 向量和点
齐次坐标还可以区分向量和点,具体如何区分的,尚待研究 ... ...
3 刚体变换
3.1 刚体定义
欧氏空间中,当物体被视为刚体时,不管是该物体的位置或朝向发生变化,还是更换观察的坐标系,其大小和形状都保持不变。
形象点说,猪八戒的九齿钉耙,由冰铁铸造而成,便是一种刚体;而镇元子大仙的七星鞭,由于是龙皮做的,故为非刚体。
3.2 位置和朝向
所谓刚体变换,就是一个可被看做刚体的物体,从一个状态 (位置和朝向),转换为另一个状态的过程。
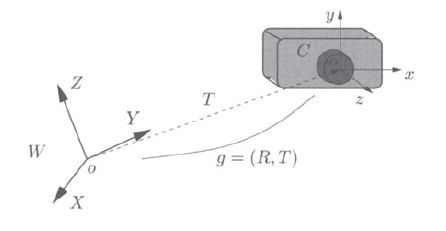
如上所示,从世界坐标系到相机坐标系的转换,朝向由旋转矩阵 $R$ 表示,位置则由平移矩阵 $T$ 来表示: $ P_{c} = R \cdot P_{w} + T$
其中,旋转矩阵 $ R = \begin{bmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{bmatrix} $,平移矩阵 $ T = \begin{bmatrix} t_{1} \\ t_{2} \\ t_{3} \end{bmatrix} $
旋转矩阵 R 为正交矩阵 (也即,RR' = E,E 为单位矩阵),则满足以下 6 个约束条件
(1) 大小约束 $\begin{cases} r_{11}^2 + r_{12}^2 + r_{13}^2 = 1 \\ r_{21}^2 + r_{22}^2 + r_{23}^2 = 1 \\ r_{31}^2 + r_{32}^2 + r_{33}^2 = 1\end{cases} $ (2) 方向约束 $\begin{cases} r_{11}*r_{21} + r_{12}*r_{22} + r_{13}*r_{23} = 0 \\ r_{21}*r_{31} + r_{22}*r_{32} + r_{23}*r_{33} = 0 \\ r_{31}*r_{11} + r_{32}*r_{12} + r_{33}*r_{13} = 0\end{cases} $
可用一个最简单的正交矩阵 E,来理解上面的约束条件
$\begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}$
3.3 转换关系
若已知 $R$ 和 $T$,则可将世界坐标系内的空间点,与相机坐标系内的空间点,建立起一一对应的关系
$ \begin{bmatrix} X_{c} \\ Y_{c} \\ Z_{c} \end{bmatrix} = \begin{bmatrix} R & T \end{bmatrix} \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \end{bmatrix}$
3.3.1 约束分析
$R$ 和 $T$ 共有 12 个未知量,减去正交约束的 6 个方程,则还剩 6 个未知量。
表面上看,似乎只需 2 组共轭点,就可得到 6 个约束方程,对应求出剩余的 6 个未知量。实际上,这 6 个方程是有冗余信息的 (两组共轭点,在各自的坐标系下,两点之间的距离相等)
因此,第 2 组共轭点,只是提供了 2 个约束方程,加上第 1 组共轭点的 3 个约束,共有 5 个独立的约束方程。
显然,还需要第 3 组共轭点,提供 1 个独立的方程,才能求得 $R$ 和 $T$
3.3.2 几何解释
如下图所示,考虑两个刚体,它们之间存在着相互 旋转 和 平移
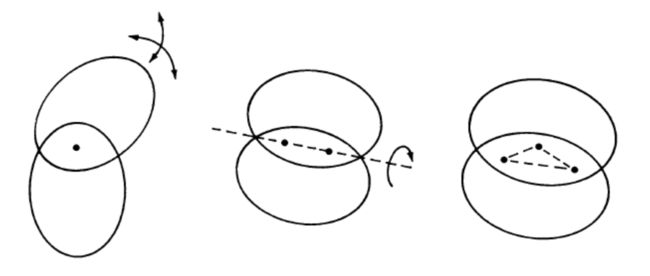
首先,在每个刚体上,各选一个点 L1 和 R1,移动其中一个刚体,使得这两个点重合。此时,一个刚体可相对于另一个刚体转动 (以三种不同的方式)。
然后,在每个刚体上,再分别取一个点 L2 和 R2,并且 | L2 - L1 | = | R2 - R1 |,移动一个刚体,使得这两对点,分别重合。此时,一个刚体可以相对另一个转动 (以一种方式)。
最后,在每个刚体上,分别取第三个点 L3 和 R3,满足 | L3 - L1 | = | R3 - R1 | 且 | L3 - L2 | = | R3 - R2 |,然后将这三个点对齐。此时,两个刚体便牢牢的连在了一起。
参考资料
<视觉测量> 张广军,第2章
Homogeneous Coordinates