Windows下运行LSD-SLAM
转载请注明出处:https://blog.csdn.net/huaweijian0324/article/details/80547782
最近学校的项目基本做完了,也快去实习了,所以抽个时间把之前做的windows下的LSD-SLAM整理一下。
LSD-SLAM是一个大规模的单目视觉半稠密slam项目,具体我就不多介绍了,个人感觉是一个很秀的算法,
想要详细了解这个算法的,请参阅这位大神lancelot_vim的博客:
https://blog.csdn.net/lancelot_vim/article/details/51706832
LSD-SLAM本身是直接在ROS下运行的,不过ROS只是起到了一个输入输出的作用,
其算法最核心的代码已有国外某大神帮我们写好(不带点云显示):
https://github.com/williammc/lsd_slam
网络不好的可以直接在这下载:
https://download.csdn.net/download/huaweijian0324/10257778
首先就是在windows下配置LSD-SLAM的环境,关于这点,我最开始做的时候也是一脸迷茫,
在windows下配置其环境是件比较繁琐的事情,因为需要用到很多很多库,
在这里要特别感谢这位兄弟YOY_,按照他的博客一步一步配置:
https://blog.csdn.net/ouyangying123/article/details/70861654
中间应该会出现编译错误,关于这点我搞了好久才明白,原来是G2O库文件的版本不对,导致用法出现了变化,
应该用老版本G2O库文件,可以在这里下载:
https://download.csdn.net/download/huaweijian0324/10257773
到这里程序应该能正常运行了,只是此时只能出现原始的图像和深度图,
想要看到三维点云的话需要自己画出来,具体画的话可以参考ROS下的LSD-SLAM源码,
特别需要注意的是,
在refreshPC()函数里,一定要加上glewInit(),不然会出现运行时异常,这点当时坑了我很久。
这里附上关键代码:
#include "KeyFrameDisplay.h"
#include
#include "lsd_slam\util\settings.h"
#include "opencv2/opencv.hpp"
KeyFrameDisplay::KeyFrameDisplay()
{
originalInput = 0;
id = 0;
vertexBufferIdValid = false;
glBuffersValid = false;
camToWorld = Sophus::Sim3f();
width = height = 0;
my_scaledTH = my_absTH = 0;
totalPoints = displayedPoints = 0;
}
KeyFrameDisplay::~KeyFrameDisplay()
{
if (vertexBufferIdValid)
{
glDeleteBuffers(1, &vertexBufferId);
vertexBufferIdValid = false;
}
if (originalInput != 0)
delete[] originalInput;
}
void KeyFrameDisplay::setFrom(lsd_slam::KeyFrameMessage* msg)
{
// copy over campose.
memcpy(camToWorld.data(), msg->camToWorld.data(), 7 * sizeof(float));
fx = msg->fx;
fy = msg->fy;
cx = msg->cx;
cy = msg->cy;
fxi = 1 / fx;
fyi = 1 / fy;
cxi = -cx / fx;
cyi = -cy / fy;
width = msg->width;
height = msg->height;
id = msg->id;
time = msg->time;
if (originalInput != 0)
delete[] originalInput;
originalInput = 0;
if (msg->pointcloud.size() != width*height*sizeof(InputPointDense))
{
if (msg->pointcloud.size() != 0)
{
printf("WARNING: PC with points, but number of points not right! (is %zu, should be %u*%dx%d=%u)\n",
msg->pointcloud.size(), sizeof(InputPointDense), width, height, width*height*sizeof(InputPointDense));
}
}
else
{
originalInput = new InputPointDense[width*height];
memcpy(originalInput, msg->pointcloud.data(), width*height*sizeof(InputPointDense));
}
glBuffersValid = false;
}
void KeyFrameDisplay::refreshPC()
{
bool paramsStillGood = my_scaledTH == scaledDepthVarTH &&
my_absTH == absDepthVarTH &&
my_scale*1.2 > camToWorld.scale() &&
my_scale < camToWorld.scale()*1.2 &&
my_minNearSupport == minNearSupport &&
my_sparsifyFactor == sparsifyFactor;
if (glBuffersValid && (paramsStillGood || numRefreshedAlready > 10)) return;
numRefreshedAlready++;
glBuffersValid = true;
// delete old vertex buffer
if (vertexBufferIdValid)
{
glDeleteBuffers(1, &vertexBufferId);
vertexBufferIdValid = false;
}
// if there are no vertices, done!
if (originalInput == 0)
return;
// make data
MyVertex* tmpBuffer = new MyVertex[width*height];
my_scaledTH = scaledDepthVarTH;
my_absTH = absDepthVarTH;
my_scale = camToWorld.scale();
my_minNearSupport = minNearSupport;
my_sparsifyFactor = sparsifyFactor;
// data is directly in ros message, in correct format.
vertexBufferNumPoints = 0;
int total = 0, displayed = 0;
for (int y = 1; y < height - 1; y++)
for (int x = 1; x < width - 1; x++)
{
if (originalInput[x + y*width].idepth <= 0) continue;
total++;
if (my_sparsifyFactor > 1 && rand() % my_sparsifyFactor != 0) continue;
float depth = 1 / originalInput[x + y*width].idepth;
//float depth = -(1 / originalInput[x + y*width].idepth);
float depth4 = depth*depth; depth4 *= depth4;
if (originalInput[x + y*width].idepth_var * depth4 > my_scaledTH)
continue;
if (originalInput[x + y*width].idepth_var * depth4 * my_scale*my_scale > my_absTH)
continue;
if (my_minNearSupport > 1)
{
int nearSupport = 0;
for (int dx = -1; dx < 2; dx++)
for (int dy = -1; dy < 2; dy++)
{
int idx = x + dx + (y + dy)*width;
if (originalInput[idx].idepth > 0)
{
float diff = originalInput[idx].idepth - 1.0f / depth;
if (diff*diff < 2 * originalInput[x + y*width].idepth_var)
nearSupport++;
}
}
if (nearSupport < my_minNearSupport)
continue;
}
tmpBuffer[vertexBufferNumPoints].point[0] = (x*fxi + cxi) * depth;
tmpBuffer[vertexBufferNumPoints].point[1] = (y*fyi + cyi) * depth;
tmpBuffer[vertexBufferNumPoints].point[2] = depth;
tmpBuffer[vertexBufferNumPoints].color[3] = 100;
tmpBuffer[vertexBufferNumPoints].color[2] = originalInput[x + y*width].color[0];
tmpBuffer[vertexBufferNumPoints].color[1] = originalInput[x + y*width].color[1];
tmpBuffer[vertexBufferNumPoints].color[0] = originalInput[x + y*width].color[2];
vertexBufferNumPoints++;
displayed++;
}
totalPoints = total;
displayedPoints = displayed;
//不加glewInit()会出现运行时异常
glewInit();
vertexBufferId = 0;
glGenBuffers(1, &vertexBufferId);
glBindBuffer(GL_ARRAY_BUFFER, vertexBufferId); // for vertex coordinates
//glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, vertexBufferId); // for vertex coordinates
glBufferData(GL_ARRAY_BUFFER, sizeof(MyVertex) * vertexBufferNumPoints, tmpBuffer, GL_STATIC_DRAW);
vertexBufferIdValid = true;
if (!keepInMemory)
{
delete[] originalInput;
originalInput = 0;
}
delete[] tmpBuffer;
}
void KeyFrameDisplay::drawCam(float lineWidth, float* color)
{
if(width == 0)
return;
glPushMatrix();
Sophus::Matrix4f m = camToWorld.matrix();
glMultMatrixf((GLfloat*)m.data());
if(color == 0)
glColor3f(1,0,0);
else
glColor3f(color[0],color[1],color[2]);
glLineWidth(lineWidth);
glBegin(GL_LINES);
glVertex3f(0,0,0);
glVertex3f(0.05*(0-cx)/fx,0.05*(0-cy)/fy,0.05);
glVertex3f(0,0,0);
glVertex3f(0.05*(0-cx)/fx,0.05*(height-1-cy)/fy,0.05);
glVertex3f(0,0,0);
glVertex3f(0.05*(width-1-cx)/fx,0.05*(height-1-cy)/fy,0.05);
glVertex3f(0,0,0);
glVertex3f(0.05*(width-1-cx)/fx,0.05*(0-cy)/fy,0.05);
glVertex3f(0.05*(width-1-cx)/fx,0.05*(0-cy)/fy,0.05);
glVertex3f(0.05*(width-1-cx)/fx,0.05*(height-1-cy)/fy,0.05);
glVertex3f(0.05*(width-1-cx)/fx,0.05*(height-1-cy)/fy,0.05);
glVertex3f(0.05*(0-cx)/fx,0.05*(height-1-cy)/fy,0.05);
glVertex3f(0.05*(0-cx)/fx,0.05*(height-1-cy)/fy,0.05);
glVertex3f(0.05*(0-cx)/fx,0.05*(0-cy)/fy,0.05);
glVertex3f(0.05*(0-cx)/fx,0.05*(0-cy)/fy,0.05);
glVertex3f(0.05*(width-1-cx)/fx,0.05*(0-cy)/fy,0.05);
glEnd();
glPopMatrix();
}
int KeyFrameDisplay::flushPC(std::ofstream* f)
{
MyVertex* tmpBuffer = new MyVertex[width*height];
int num = 0;
for(int y=1;y 1 && rand()%my_sparsifyFactor != 0) continue;
float depth = 1 / originalInput[x+y*width].idepth;
float depth4 = depth*depth; depth4*= depth4;
if(originalInput[x+y*width].idepth_var * depth4 > my_scaledTH)
continue;
if(originalInput[x+y*width].idepth_var * depth4 * my_scale*my_scale > my_absTH)
continue;
if(my_minNearSupport > 1)
{
int nearSupport = 0;
for(int dx=-1;dx<2;dx++)
for(int dy=-1;dy<2;dy++)
{
int idx = x+dx+(y+dy)*width;
if(originalInput[idx].idepth > 0)
{
float diff = originalInput[idx].idepth - 1.0f / depth;
if(diff*diff < 2*originalInput[x+y*width].idepth_var)
nearSupport++;
}
}
if(nearSupport < my_minNearSupport)
continue;
}
Sophus::Vector3f pt = camToWorld * (Sophus::Vector3f((x*fxi + cxi), (y*fyi + cyi), 1) * depth);
tmpBuffer[num].point[0] = pt[0];
tmpBuffer[num].point[1] = pt[1];
tmpBuffer[num].point[2] = pt[2];
tmpBuffer[num].color[3] = 100;
tmpBuffer[num].color[2] = originalInput[x+y*width].color[0];
tmpBuffer[num].color[1] = originalInput[x+y*width].color[1];
tmpBuffer[num].color[0] = originalInput[x+y*width].color[2];
num++;
}
for(int i=0;iwrite((const char *)tmpBuffer[i].point,3*sizeof(float));
float color = tmpBuffer[i].color[0] / 255.0;
f->write((const char *)&color,sizeof(float));
}
// *f << tmpBuffer[i].point[0] << " " << tmpBuffer[i].point[1] << " " << tmpBuffer[i].point[2] << " " << (tmpBuffer[i].color[0] / 255.0) << "\n";
delete tmpBuffer;
printf("Done flushing frame %d (%d points)!\n", this->id, num);
return num;
}
void KeyFrameDisplay::drawPC(float pointSize, float alpha)
{
refreshPC();
if(!vertexBufferIdValid)
{
return;
}
GLfloat LightColor[] = {1, 1, 1, 1};
if(alpha < 1)
{
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
LightColor[0] = LightColor[1] = 0;
glEnable(GL_LIGHTING);
glDisable(GL_LIGHT1);
glLightfv (GL_LIGHT0, GL_AMBIENT, LightColor);
}
else
{
glDisable(GL_LIGHTING);
}
glPushMatrix();
Sophus::Matrix4f m = camToWorld.matrix();
glMultMatrixf((GLfloat*)m.data());
glPointSize(pointSize);
glBindBuffer(GL_ARRAY_BUFFER, vertexBufferId);
glVertexPointer(3, GL_FLOAT, sizeof(MyVertex), 0);
glColorPointer(4, GL_UNSIGNED_BYTE, sizeof(MyVertex), (const void*) (3*sizeof(float)));
glEnableClientState(GL_VERTEX_ARRAY);
glEnableClientState(GL_COLOR_ARRAY);
glDrawArrays(GL_POINTS, 0, vertexBufferNumPoints);
glDisableClientState(GL_COLOR_ARRAY);
glDisableClientState(GL_VERTEX_ARRAY);
glPopMatrix();
if(alpha < 1)
{
glDisable(GL_BLEND);
glDisable(GL_LIGHTING);
LightColor[2] = LightColor[1] = LightColor[0] = 1;
glLightfv (GL_LIGHT0, GL_AMBIENT_AND_DIFFUSE, LightColor);
}
}
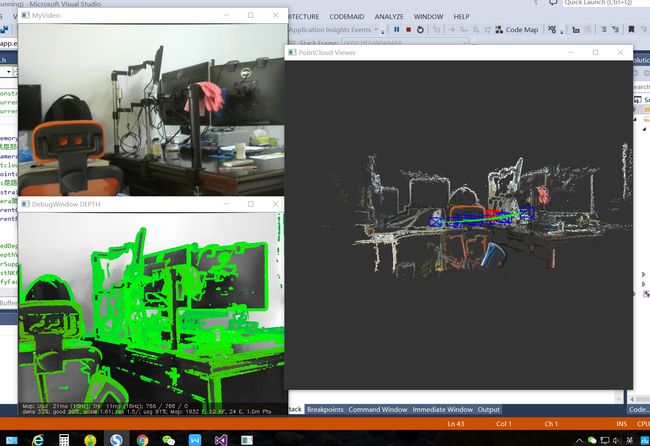
然后再插上一个单目摄像头,就可以愉快地运行了,我用的摄像头是罗技C270型号。
下面附上一张在VS2013下运行的效果图:

还是很炫的吧~
后来就是想着怎么把原始点云数据转化为RGB点云数据,因为如果能生成RGB点云的话岂不是更炫?
然后我参考国外某大神的一个帖子,主要思路就是重载一个Frame的构造函数,把rgb数据传进来,
附上关键代码:
Frame::Frame(int id, int width, int height, const Eigen::Matrix3f& K, double timestamp, const unsigned char* image, const unsigned char* rgbImage)
{
initialize(id, width, height, K, timestamp);
data.image[0] = FrameMemory::getInstance().getFloatBuffer(data.width[0] * data.height[0]);
data.imageRGB[0] = FrameMemory::getInstance().getFloatBuffer(data.width[0] * data.height[0] * 3);
float* maxPt = data.image[0] + data.width[0] * data.height[0];
float* maxPtRGB = data.imageRGB[0] + data.width[0] * data.height[0] * 3;
for (float* pt = data.image[0]; pt < maxPt; pt++)
{
*pt = *image;
image++;
}
for (float* pt = data.imageRGB[0]; pt < maxPtRGB; pt++)
{
*pt = *rgbImage;
rgbImage++;
}
data.imageValid[0] = true;
privateFrameAllocCount++;
if (enablePrintDebugInfo && printMemoryDebugInfo)
printf("ALLOCATED frame %d, now there are %d\n", this->id(), privateFrameAllocCount);
}特别注意:
一定要在frame析构函数里把添加的rbg数据给删除掉,不然会出现很严重的内存泄露问题。
下面附上一张改进后的rgb点云效果图:
是不是看起来又更炫了一点呢?
点云数据是可以保存为.ply文件到本地的,可以用Mashlab直接打开,
附上很久之前保存的一个.ply文件的效果图(椅子上挂的是件睡衣):
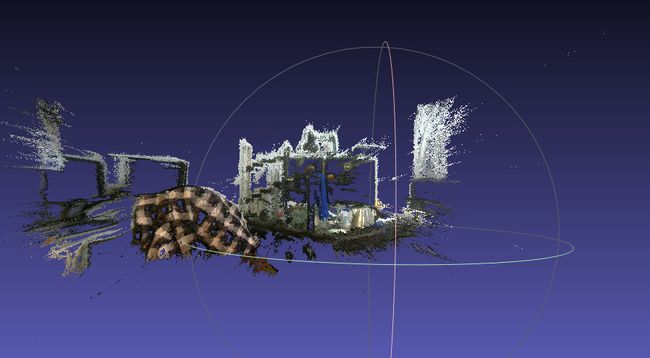
还是很有立体感的吧,Y(^_^)Y~
好了,就先写到这吧,有什么不对的地方还请大家多多指教~