ROS中从摄像头获取PCL点云数据,并滤波后在Rviz中显示
一、点云简介
通过测量仪器得到的产品外观表面的点数据集合也称之为点云,通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点云;而使用三维激光扫描仪或照相式扫描仪得到的点云,点数量比较大并且比较密集,叫密集点云。
经过几十年的发展,机器人传感器领域已经发生了巨大的变化:从基于声呐的简单测距功能到现在的视觉传感器和激光扫描仪。由视觉传感器和激光扫描仪提供的大量3D数据已经变得实用起来,像DAPAR无人汽车挑战赛已经可以实用高质量的3D点云来感知世界。近年来,一些3D传感器价格已经普遍为大家接受,像微软公司提供的Xbox360游戏机附带的传感器Kinect,价格在1000元左右。Kinect可以提供3D点云,使得机器人可以看到3D世界。
那么如何有效处理3D点云数据,PCL(point cloud library)给出了一个很好的解决方案。PCL是一个独立的、大规模开源点云处理软件包,现在已经完全集成到ROS中。PCL被设计用于感知3D世界,可以处理实时感知设备的数据,像激光扫描仪、双目立体视觉系统和ToF(Time of Flight)摄像机。
下面我们给出一个案例,在ROS中实现从摄像头获取PCL点云数据,并滤波后在Rviz中显示。
二、安装摄像头驱动等基础程序
经过测试,由于Openni2驱动程序无法对华硕的某型摄像头(ASUSTek)产生的点云消息进行发布,因此,安装Open你驱动程序,命令如下:
apt-get install ros-kinetic-openni-camera ros-kinetic-openni-launch安装完,通过如下命令测试
roslaunch openni_launch openni.launch注意:如果提示 “USB interface is not supported!”,则通过如下命令继续安装一个驱动,问题即可解决
sudo apt-get install libopenni-dev libopenni-sensor-primesense-dev三、创建ROS package
catkin_create_pkg my_pcl_tutorial pcl_conversions pcl_ros roscpp sensor_msgs然后,在package.xml中增加如下代码
libpcl-all-dev
libpcl-all 四、创建源代码文件src/example.cpp,将下面的代码粘贴到里边
#include
// PCL specific includes 。PCL 的相关的头文件
#include
#include
#include
#include
//滤波的头文件
#include
//申明发布器
ros::Publisher pub;
//回调函数
void
cloud_cb (const sensor_msgs::PointCloud2ConstPtr& cloud_msg)
{
// 声明存储原始数据与滤波后的数据的点云的格式
// Container for original & filtered data
pcl::PCLPointCloud2* cloud = new pcl::PCLPointCloud2; //原始的点云的数据格式
pcl::PCLPointCloud2ConstPtr cloudPtr(cloud);
pcl::PCLPointCloud2 cloud_filtered;//存储滤波后的数据格式
// Convert to PCL data type。转化为PCL中的点云的数据格式
pcl_conversions::toPCL(*cloud_msg, *cloud);
// Perform the actual filtering进行一个滤波处理
pcl::VoxelGrid sor; //创建滤波对象
sor.setInputCloud (cloudPtr); //设置输入的滤波,将需要过滤的点云给滤波对象
sor.setLeafSize (0.1, 0.1, 0.1); //设置滤波时创建的体素大小为1cm立方体
sor.filter (cloud_filtered);//执行滤波处理,存储输出cloud_filtered
// Convert to ROS data type。// 再将滤波后的点云的数据格式转换为ROS下的数据格式发布出去
sensor_msgs::PointCloud2 output;//声明的输出的点云的格式
pcl_conversions::moveFromPCL(cloud_filtered, output);//第一个参数是输入,后面的是输出
// Publish the data
pub.publish (output);
}
int
main (int argc, char** argv)
{
// Initialize ROS
ros::init (argc, argv, "my_pcl_tutorial");//声明节点的名称
ros::NodeHandle nh;
// Create a ROS subscriber for the input point cloud
// 为接受点云数据创建一个订阅节点
ros::Subscriber sub = nh.subscribe ("input", 1, cloud_cb);
// Create a ROS publisher for the output point cloud
//创建ROS的发布节点
pub = nh.advertise ("output", 1);
// Spin
// 回调
ros::spin ();
} 五、在CMakeLists .txt中增加下面的内容
add_executable(example src/example.cpp)
target_link_libraries(example ${catkin_LIBRARIES})六、编译工作空间
$ cd ~/catkin_ws
$ catkin_make七、运行roscore
roscore
roslaunch openni_launch openni.launch九、新的Terminal中运行我们编写的摄像头点云数据降采样程序
rosrun my_pcl_tutorial example input:=/camera/depth/points十、新的Terminal中运行Rviz,查看滤波前后的点云数据
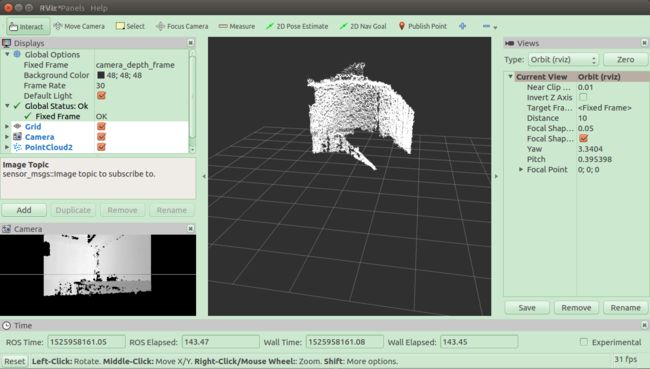
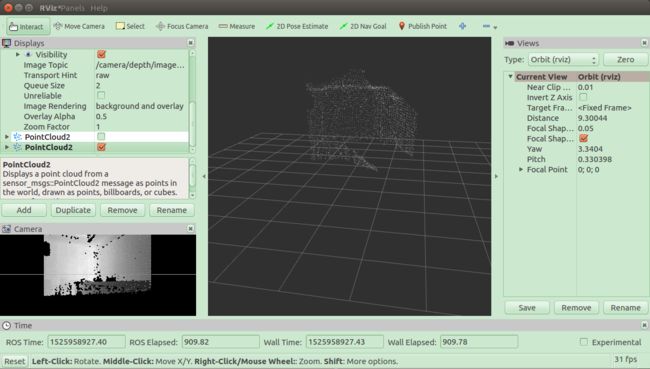
rosrun rviz rvizRviz中,Global Options中的Fixed Frame选择camera_depth_frame;通过Add按钮可以添加camera图像数据以及降采样前后的点云数据到Displays面板中,从而查看运行效果,如下图所示。第一幅为降采样前的点云数据显示,第二幅为降采样后的点云数据显示。