Autoware Demo测试
当Autoware已经正确安装后,进行简单Demo测试,熟悉Autoware环境。
一.Demo数据
这个演示需要3D地图和ROSBAG数据。请在运行演示之前下载以下示例启动脚本和演示数据。
1.下载用于生成演示启动文件的脚本。[link]
2.下载示例3D点云/矢量图数据。[link]
3.下载示例ROSBAG数据(LiDAR: VELODYNE HDL-32E, GNSS: JAVAD GPS RTK Delta 3)。 [link]
想要更多的数据?
一旦演示顺利,您可以访问ROSBAG STORE获得更多的数据。请同时考虑您上传ROSBAG数据对该数据共享服务的贡献。
4.新建.autoware文件夹,将下载的文件拷贝过来并解压,留待后续测试用。
mkdir .autoware
cp $HOME/Downloads/my_launch.sh ./.autoware/
cp $HOME/Downloads/sample_moriyama_data.tar.gz ./.autoware/
cp $HOME/Downloads/sample_moriyama_150324.tar.gz ./.autoware/
cd .autoware/
sh my_launch.sh
tar -xzvf sample_moriyama_data.tar.gz
tar -xzvf sample_moriyama_150324.tar.gz
二.运行Demo
Autoware为演示提供了一组预先安装的roslaunch脚本。请遵循以下步骤:
1.运行runtime_manager
cd $HOME/Autoware/ros/
./run
会出现两个分离的终端命令窗口,一个是[roscore],一个是[runtime_manager] 。
Runtime Manager启动前要输入管理员密码,输入密码后就可以启动了。
2.进入Autoware Runtime Manager的[Simulation]选项卡,点击Ref按钮加载示例ROSBAG数据。

3.点击[Play]按钮播放已加载的ROSBAG数据,并立即点击[Pause]暂停一次。
4.启动RViz

点击RViz按钮启动Rviz可视化工具。启动后选择[file]-[open config],在[choose a file to open]对话框中,选择~Autoware/ros/src/.config/rviz/default.rviz,然后点击[open]。

5.转到Autoware Runtime Manager的[Quick Start]选项卡,加载my_map.launch,并且点击[Map]按钮生效。
“~/.autoware/my_launch/my_map.launch”
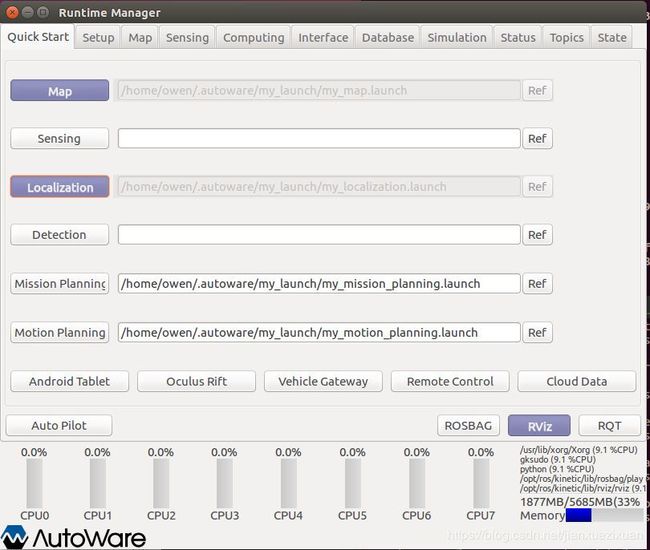
加载my_localization.launch,并且点击[Localization]按钮生效。
“~/.autoware/my_launch/my_localization.launch”
进入[Simulation]选项卡中,按[Pause]按钮释放,继续ROSBAG播放。
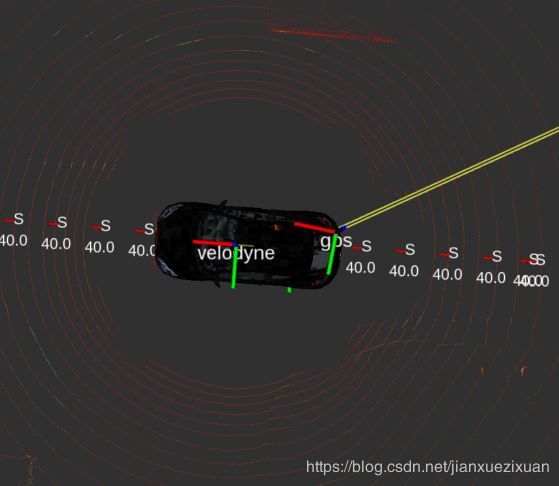
6.RViz中显示
将[Global Options]-[Fixed Frame] , 设置为 “world”。(这将覆盖Velodyne数据和3D地图数据的显示。)
在 [Current View]-[Target Frame]的 [View] 窗口, 选择“base_link” 并且设置[Type]为“TopDownOrtho”,然后点击 [Zero] 按钮。(可以初始化追踪汽车的位置)。
当[simulation]界面的进度条到达23%左右(110/479sec),演示应该趋向于稳定了。

7.开始任务规划
在[Quick Start]选项卡中,在[Mission Planning]按钮旁边的文本字段中加载以下.launch文件,并按下[Mission Planning]按钮。
“~/.autoware/my_launch/my_mission_planning.launch”
在第一个拐弯后不久(进度条38%,约182/479秒),路径和速度将会显示。
8.开始运动规划
在[Quick Start]选项卡中,在[[Motion Planning]按钮旁边的文本字段中加载以下.launch文件,并按下[[Motion Planning]按钮。
“~/.autoware/my_launch/my_motion_planning.launch”
当小车在路径规划中到达设定的路径时,会显示绿色小球和计算为纯追踪的径向圆。直到Demo数据播放完成。