一步一步学linux操作系统: 13 进程调度二_主动调度
进程调度可分为主动调度与抢占式调度
主动调度
进程运行中,发现里面有一条指令 sleep,或者在等待某个 I/O 事件,就要主动让出 CPU
两个例子代码片段
等待一个写入
写入块设备的一个典型场景,写入需要一段时间,这段时间用不上 CPU,需要主动让给其他进程
\fs\btrfs\ioctl.c
static void btrfs_wait_for_no_snapshoting_writes(struct btrfs_root *root)
{
s64 writers;
DEFINE_WAIT(wait);
do {
prepare_to_wait(&root->subv_writers->wait, &wait,
TASK_UNINTERRUPTIBLE);
writers = percpu_counter_sum(&root->subv_writers->counter);
if (writers)
schedule();
finish_wait(&root->subv_writers->wait, &wait);
} while (writers);
}
从 Tap 网络设备等待一个读取
Tap 网络设备是虚拟机使用的网络设备,当没有数据到来的时候,它也需要等待,所以也会选择把 CPU 让给其他进程
\drivers\net\tap.c
static ssize_t tap_do_read(struct tap_queue *q,
struct iov_iter *to,
int noblock, struct sk_buff *skb)
{
DEFINE_WAIT(wait);
ssize_t ret = 0;
if (!iov_iter_count(to))
return 0;
if (skb)
goto put;
while (1) {
if (!noblock)
prepare_to_wait(sk_sleep(&q->sk), &wait,
TASK_INTERRUPTIBLE);
/* Read frames from the queue */
skb = skb_array_consume(&q->skb_array);
if (skb)
break;
if (noblock) {
ret = -EAGAIN;
break;
}
if (signal_pending(current)) {
ret = -ERESTARTSYS;
break;
}
/* Nothing to read, let's sleep */
schedule();
}
if (!noblock)
finish_wait(sk_sleep(&q->sk), &wait);
put:
if (skb) {
ret = tap_put_user(q, skb, to);
if (unlikely(ret < 0))
kfree_skb(skb);
else
consume_skb(skb);
}
return ret;
}
schedule 函数
计算机在操作外部设备的时候,往往需要让出 CPU,就像上面两段代码一样,选择调用 schedule() 函数。
\kernel\sched\core.c
asmlinkage __visible void __sched schedule(void)
{
struct task_struct *tsk = current;
sched_submit_work(tsk);
do {
preempt_disable();
__schedule(false);
sched_preempt_enable_no_resched();
} while (need_resched());
}

主要逻辑是在 __schedule 函数中实现
__schedule 函数
\kernel\sched\core.c
/*
* __schedule() is the main scheduler function.
*
* The main means of driving the scheduler and thus entering this function are:
*
* 1. Explicit blocking: mutex, semaphore, waitqueue, etc.
*
* 2. TIF_NEED_RESCHED flag is checked on interrupt and userspace return
* paths. For example, see arch/x86/entry_64.S.
*
* To drive preemption between tasks, the scheduler sets the flag in timer
* interrupt handler scheduler_tick().
*
* 3. Wakeups don't really cause entry into schedule(). They add a
* task to the run-queue and that's it.
*
* Now, if the new task added to the run-queue preempts the current
* task, then the wakeup sets TIF_NEED_RESCHED and schedule() gets
* called on the nearest possible occasion:
*
* - If the kernel is preemptible (CONFIG_PREEMPT=y):
*
* - in syscall or exception context, at the next outmost
* preempt_enable(). (this might be as soon as the wake_up()'s
* spin_unlock()!)
*
* - in IRQ context, return from interrupt-handler to
* preemptible context
*
* - If the kernel is not preemptible (CONFIG_PREEMPT is not set)
* then at the next:
*
* - cond_resched() call
* - explicit schedule() call
* - return from syscall or exception to user-space
* - return from interrupt-handler to user-space
*
* WARNING: must be called with preemption disabled!
*/
static void __sched notrace __schedule(bool preempt)
{
struct task_struct *prev, *next;
unsigned long *switch_count;
struct rq_flags rf;
struct rq *rq;
int cpu;
cpu = smp_processor_id();
rq = cpu_rq(cpu);
prev = rq->curr;
schedule_debug(prev);
if (sched_feat(HRTICK))
hrtick_clear(rq);
local_irq_disable();
rcu_note_context_switch(preempt);
/*
* Make sure that signal_pending_state()->signal_pending() below
* can't be reordered with __set_current_state(TASK_INTERRUPTIBLE)
* done by the caller to avoid the race with signal_wake_up().
*/
smp_mb__before_spinlock();
rq_lock(rq, &rf);
/* Promote REQ to ACT */
rq->clock_update_flags <<= 1;
update_rq_clock(rq);
switch_count = &prev->nivcsw;
if (!preempt && prev->state) {
if (unlikely(signal_pending_state(prev->state, prev))) {
prev->state = TASK_RUNNING;
} else {
deactivate_task(rq, prev, DEQUEUE_SLEEP | DEQUEUE_NOCLOCK);
prev->on_rq = 0;
if (prev->in_iowait) {
atomic_inc(&rq->nr_iowait);
delayacct_blkio_start();
}
/*
* If a worker went to sleep, notify and ask workqueue
* whether it wants to wake up a task to maintain
* concurrency.
*/
if (prev->flags & PF_WQ_WORKER) {
struct task_struct *to_wakeup;
to_wakeup = wq_worker_sleeping(prev);
if (to_wakeup)
try_to_wake_up_local(to_wakeup, &rf);
}
}
switch_count = &prev->nvcsw;
}
next = pick_next_task(rq, prev, &rf);
clear_tsk_need_resched(prev);
clear_preempt_need_resched();
if (likely(prev != next)) {
rq->nr_switches++;
rq->curr = next;
++*switch_count;
trace_sched_switch(preempt, prev, next);
/* Also unlocks the rq: */
rq = context_switch(rq, prev, next, &rf);
} else {
rq->clock_update_flags &= ~(RQCF_ACT_SKIP|RQCF_REQ_SKIP);
rq_unlock_irq(rq, &rf);
}
balance_callback(rq);
}
主要步骤如下
第一步, 在当前的 CPU 上,取出任务队列 rq
static void __sched notrace __schedule(bool preempt)
{
struct task_struct *prev, *next;
unsigned long *switch_count;
struct rq_flags rf;
struct rq *rq;
int cpu;
cpu = smp_processor_id();
rq = cpu_rq(cpu);
prev = rq->curr;
......
task_struct *prev 指向这个 CPU 的任务队列上面正在运行的那个进程 curr,prev是因为一旦它被切换下来,那它就成了前任了
第二步, 获取下一个任务,task_struct *next 指向下一个任务,这就是继任
next = pick_next_task(rq, prev, &rf);
clear_tsk_need_resched(prev);
clear_preempt_need_resched();
pick_next_task 的实现
\kernel\sched\core.c
/*
* Pick up the highest-prio task:
*/
static inline struct task_struct *
pick_next_task(struct rq *rq, struct task_struct *prev, struct rq_flags *rf)
{
const struct sched_class *class;
struct task_struct *p;
/*
* Optimization: we know that if all tasks are in the fair class we can
* call that function directly, but only if the @prev task wasn't of a
* higher scheduling class, because otherwise those loose the
* opportunity to pull in more work from other CPUs.
*/
if (likely((prev->sched_class == &idle_sched_class ||
prev->sched_class == &fair_sched_class) &&
rq->nr_running == rq->cfs.h_nr_running)) {
p = fair_sched_class.pick_next_task(rq, prev, rf);
if (unlikely(p == RETRY_TASK))
goto again;
/* Assumes fair_sched_class->next == idle_sched_class */
if (unlikely(!p))
p = idle_sched_class.pick_next_task(rq, prev, rf);
return p;
}
again:
for_each_class(class) {
p = class->pick_next_task(rq, prev, rf);
if (p) {
if (unlikely(p == RETRY_TASK))
goto again;
return p;
}
}
/* The idle class should always have a runnable task: */
BUG();
}
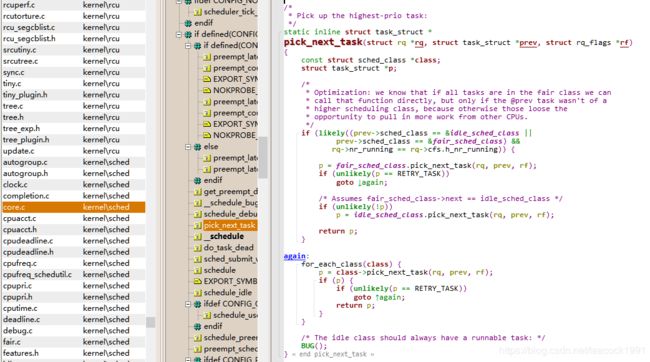
again 这里就是 12进程调度一 中介绍的依次调用调度类,但是这里有了一个优化,因为大部分进程是普通进程,所以大部分情况下会调用上面的逻辑,调用的就是 fair_sched_class.pick_next_task。
由 12进程调度一可知fair_sched_class中调用的是 pick_next_task_fair
\kernel\sched\fair.c
static struct task_struct *
pick_next_task_fair(struct rq *rq, struct task_struct *prev, struct rq_flags *rf)
{
struct cfs_rq *cfs_rq = &rq->cfs;
struct sched_entity *se;
struct task_struct *p;
int new_tasks;
....

对于 CFS 调度类,取出相应的队列 cfs_rq,这就是 12进程调度一介绍的那棵红黑树。
pick_next_task_fair函数中
struct sched_entity *curr = cfs_rq->curr;
if (curr) {
if (curr->on_rq)
update_curr(cfs_rq);
else
curr = NULL;
......
}
se = pick_next_entity(cfs_rq, curr);
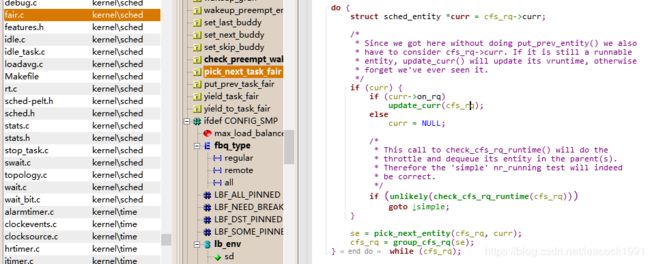
取出当前正在运行的任务 curr,如果依然是可运行的状态,也即处于进程就绪状态,则调用 update_curr 更新 vruntime
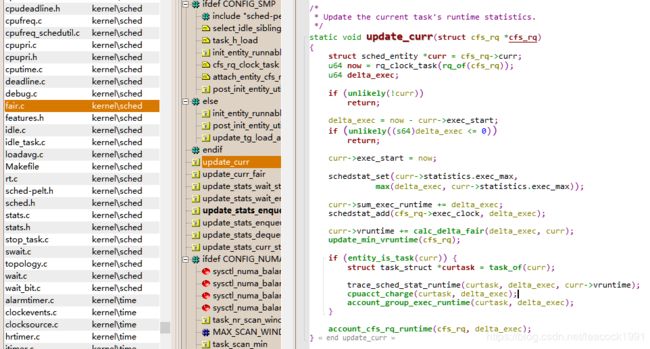
update_curr 函数,计算并更新vruntime,虚拟运行时间 vruntime += 实际运行时间 delta_exec * NICE_0_LOAD/ 权重
\kernel\sched\fair.c
/*
* Update the current task's runtime statistics.
*/
static void update_curr(struct cfs_rq *cfs_rq)
{
struct sched_entity *curr = cfs_rq->curr;
u64 now = rq_clock_task(rq_of(cfs_rq));
u64 delta_exec;
if (unlikely(!curr))
return;
delta_exec = now - curr->exec_start;
if (unlikely((s64)delta_exec <= 0))
return;
curr->exec_start = now;
schedstat_set(curr->statistics.exec_max,
max(delta_exec, curr->statistics.exec_max));
curr->sum_exec_runtime += delta_exec;
schedstat_add(cfs_rq->exec_clock, delta_exec);
curr->vruntime += calc_delta_fair(delta_exec, curr);
update_min_vruntime(cfs_rq);
if (entity_is_task(curr)) {
struct task_struct *curtask = task_of(curr);
trace_sched_stat_runtime(curtask, delta_exec, curr->vruntime);
cpuacct_charge(curtask, delta_exec);
account_group_exec_runtime(curtask, delta_exec);
}
account_cfs_rq_runtime(cfs_rq, delta_exec);
}
pick_next_entity 从红黑树里面,取最左边的一个节点,也就是下一个调度实体
pick_next_task_fair函数中
p = task_of(se);
if (prev != p) {
struct sched_entity *pse = &prev->se;
......
put_prev_entity(cfs_rq, pse);
set_next_entity(cfs_rq, se);
}
return p
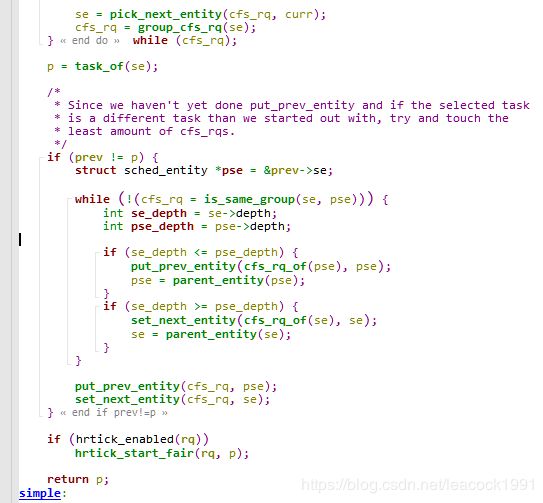
task_of 得到下一个调度实体对应的 task_struct,如果发现继任和前任不一样,这就说明有一个更需要运行的进程了,就需要更新红黑树了。
前面 vruntime 更新过了,put_prev_entity 放回红黑树,然后 set_next_entity 将继任者设为当前任务。
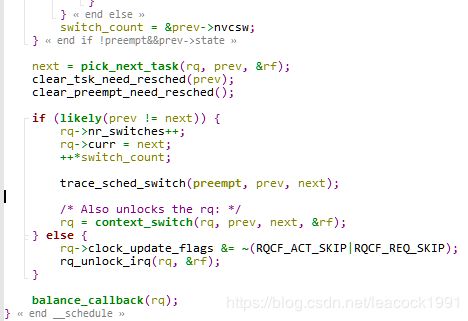
第三步,当选出的继任者和前任不同,就要进行上下文切换,继任者进程正式进入运行
上面 static void __sched notrace __schedule(bool preempt)函数中
if (likely(prev != next)) {
rq->nr_switches++;
rq->curr = next;
++*switch_count;
trace_sched_switch(preempt, prev, next);
/* Also unlocks the rq: */
rq = context_switch(rq, prev, next, &rf);
} else {
rq->clock_update_flags &= ~(RQCF_ACT_SKIP|RQCF_REQ_SKIP);
rq_unlock_irq(rq, &rf);
}
进程上下文切换
上面 static void __sched notrace __schedule(bool preempt)函数中的 context_switch
上下文切换主要干两件事情,一是切换进程空间,也即虚拟内存;二是切换寄存器和 CPU 上下文。
context_switch 的实现
\kernel\sched\core.c
/*
* context_switch - switch to the new MM and the new thread's register state.
*/
static __always_inline struct rq *
context_switch(struct rq *rq, struct task_struct *prev,
struct task_struct *next, struct rq_flags *rf)
{
struct mm_struct *mm, *oldmm;
prepare_task_switch(rq, prev, next);
mm = next->mm;
oldmm = prev->active_mm;
/*
* For paravirt, this is coupled with an exit in switch_to to
* combine the page table reload and the switch backend into
* one hypercall.
*/
arch_start_context_switch(prev);
if (!mm) {
next->active_mm = oldmm;
mmgrab(oldmm);
enter_lazy_tlb(oldmm, next);
} else
switch_mm_irqs_off(oldmm, mm, next);
if (!prev->mm) {
prev->active_mm = NULL;
rq->prev_mm = oldmm;
}
rq->clock_update_flags &= ~(RQCF_ACT_SKIP|RQCF_REQ_SKIP);
/*
* Since the runqueue lock will be released by the next
* task (which is an invalid locking op but in the case
* of the scheduler it's an obvious special-case), so we
* do an early lockdep release here:
*/
rq_unpin_lock(rq, rf);
spin_release(&rq->lock.dep_map, 1, _THIS_IP_);
/* Here we just switch the register state and the stack. */
switch_to(prev, next, prev);
barrier();
return finish_task_switch(prev);
}
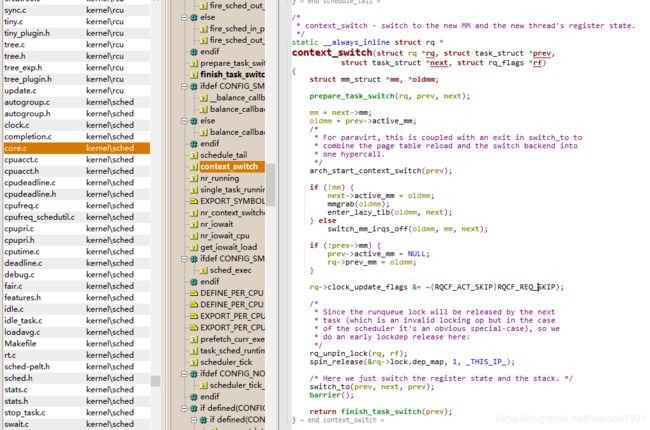
首先是内存空间的切换
见 context_switch 的实现 中函数
涉及内存管理的内容比较多,在后续内存管理介绍
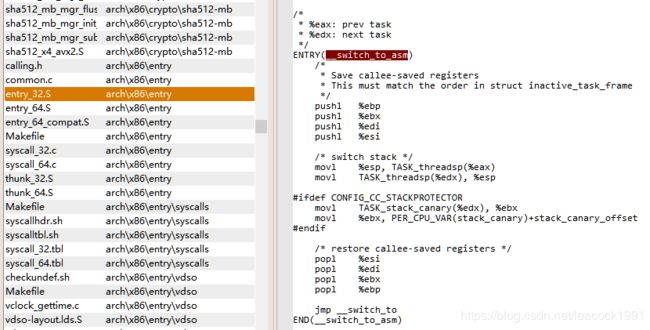
接着 switch_to 这就是寄存器和栈的切换
它调用到了 __switch_to_asm,是一段汇编代码,主要用于栈的切换
32 位操作系统
切换的是栈顶指针 esp
\arch\x86\entry\entry_32.S
/*
* %eax: prev task
* %edx: next task
*/
ENTRY(__switch_to_asm)
/*
* Save callee-saved registers
* This must match the order in struct inactive_task_frame
*/
pushl %ebp
pushl %ebx
pushl %edi
pushl %esi
/* switch stack */
movl %esp, TASK_threadsp(%eax)
movl TASK_threadsp(%edx), %esp
#ifdef CONFIG_CC_STACKPROTECTOR
movl TASK_stack_canary(%edx), %ebx
movl %ebx, PER_CPU_VAR(stack_canary)+stack_canary_offset
#endif
/* restore callee-saved registers */
popl %esi
popl %edi
popl %ebx
popl %ebp
jmp __switch_to
END(__switch_to_asm)
64 位操作系统
切换的是栈顶指针 rsp
\arch\x86\entry\entry_64.S
/*
* %rdi: prev task
* %rsi: next task
*/
ENTRY(__switch_to_asm)
/*
* Save callee-saved registers
* This must match the order in inactive_task_frame
*/
pushq %rbp
pushq %rbx
pushq %r12
pushq %r13
pushq %r14
pushq %r15
/* switch stack */
movq %rsp, TASK_threadsp(%rdi)
movq TASK_threadsp(%rsi), %rsp
#ifdef CONFIG_CC_STACKPROTECTOR
movq TASK_stack_canary(%rsi), %rbx
movq %rbx, PER_CPU_VAR(irq_stack_union)+stack_canary_offset
#endif
/* restore callee-saved registers */
popq %r15
popq %r14
popq %r13
popq %r12
popq %rbx
popq %rbp
jmp __switch_to
END(__switch_to_asm)
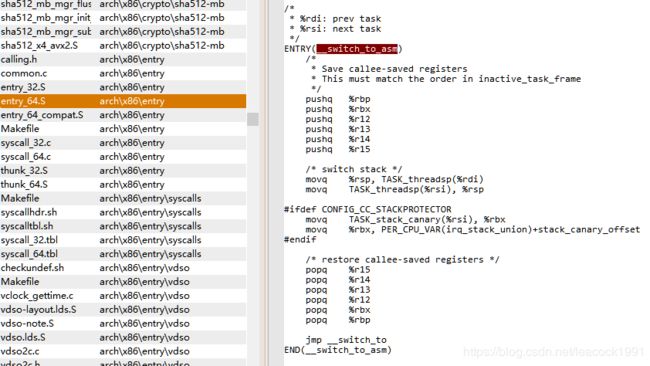
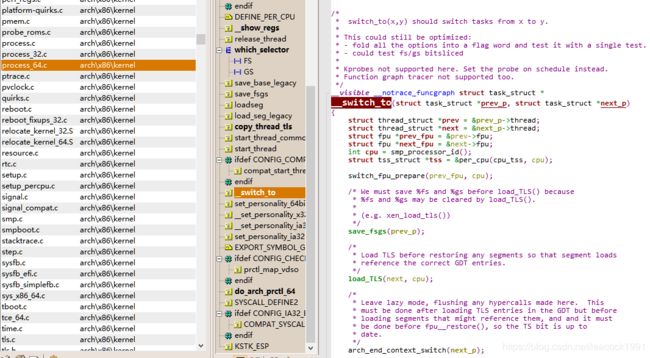
最终,都返回了 __switch_to 这个函数
__switch_to 这个函数源码位置
- 32位在 arch/x86/kernel/process_32.c
- 64位在 arch/x86/kernel/process_64.c
对于 32 位和 64 位操作系统虽然有不同的实现,但里面做的事情是差不多的,以64 位操作系统为例
arch/x86/kernel/process_64.c
__visible __notrace_funcgraph struct task_struct *
__switch_to(struct task_struct *prev_p, struct task_struct *next_p)
{
struct thread_struct *prev = &prev_p->thread;
struct thread_struct *next = &next_p->thread;
......
int cpu = smp_processor_id();
struct tss_struct *tss = &per_cpu(cpu_tss, cpu);
......
load_TLS(next, cpu);
......
this_cpu_write(current_task, next_p);
/* Reload esp0 and ss1. This changes current_thread_info(). */
load_sp0(tss, next);
......
return prev_p;
}
Per CPU 的结构体 tss
在 x86 体系结构中,提供了一种以硬件的方式进行进程切换的模式,对于每个进程,x86 希望在内存里面维护一个 TSS(Task State Segment,任务状态段)结构。这里面有所有的寄存器。
寄存器 TR(Task Register,任务寄存器)
一个特殊的寄存器 TR(Task Register,任务寄存器)指向某个进程的 TSS,更改 TR 的值,将会触发硬件保存 CPU 所有寄存器的值到当前进程的 TSS 中,然后从新进程的 TSS 中读出所有寄存器值,加载到 CPU 对应的寄存器中。
32 位的 TSS 结构
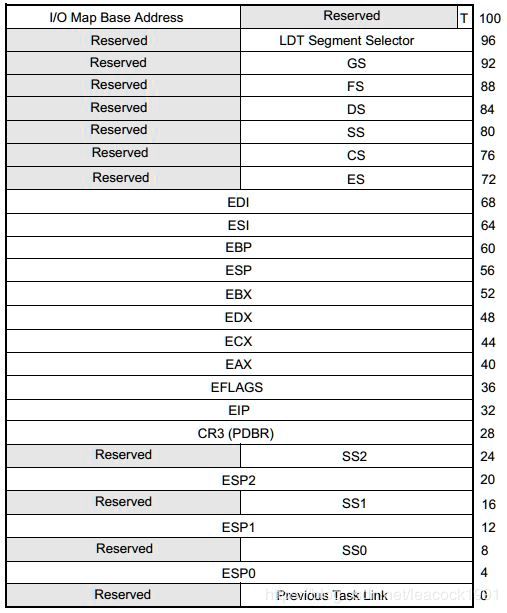
图片来自 Intel® 64 and IA-32 Architectures Software Developer’s Manual Combined Volumes
做进程切换的时候,没必要每个寄存器都切换,如果这样每个进程一个 TSS,需要全量保存,全量切换,动作太大了,所以没有必要全部切换
Linux 操作系统是如何切换的呢?
系统初始化会调用 cpu_init(init/main.c中start_kernel(void)函数 系统初始化->trap_init ->cpu_init),这里面会给每一个 CPU 关联一个 TSS,然后将 TR 指向这个 TSS,然后在操作系统的运行过程中,TR 就不切换了,永远指向这个 TSS。TSS 用数据结构 tss_struct 表示,在 x86_hw_tss (/arch/x86/include/asm/processor.h)中可以看到和上图相应的结构
cpu_init函数实现
\arch\x86\kernel\cpu\common.c
void cpu_init(void)
{
int cpu = smp_processor_id();
struct task_struct *curr = current;
struct tss_struct *t = &per_cpu(cpu_tss, cpu);
......
load_sp0(t, thread);
set_tss_desc(cpu, t);
load_TR_desc();
......
}

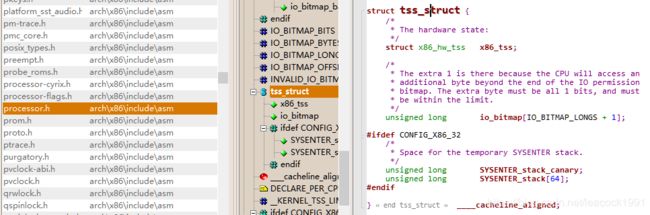
数据结构 tss_struct
\arch\x86\include\asm\processor.h
struct tss_struct {
/*
* The hardware state:
*/
struct x86_hw_tss x86_tss;
/*
* The extra 1 is there because the CPU will access an
* additional byte beyond the end of the IO permission
* bitmap. The extra byte must be all 1 bits, and must
* be within the limit.
*/
unsigned long io_bitmap[IO_BITMAP_LONGS + 1];
#ifdef CONFIG_X86_32
/*
* Space for the temporary SYSENTER stack.
*/
unsigned long SYSENTER_stack_canary;
unsigned long SYSENTER_stack[64];
#endif
} ____cacheline_aligned;
在 Linux 中,真的参与进程切换的寄存器很少,主要的就是栈顶寄存器,于是,在 task_struct 里面,还有一个成员变量 thread。这里面保留了要切换进程的时候需要修改的寄存器。
/* CPU-specific state of this task: */
struct thread_struct thread;

thread_struct 结构体
\arch\x86\include\asm\processor.h
struct thread_struct {
/* Cached TLS descriptors: */
struct desc_struct tls_array[GDT_ENTRY_TLS_ENTRIES];
unsigned long sp0;
unsigned long sp;
#ifdef CONFIG_X86_32
unsigned long sysenter_cs;
#else
unsigned short es;
unsigned short ds;
unsigned short fsindex;
unsigned short gsindex;
#endif
u32 status; /* thread synchronous flags */
#ifdef CONFIG_X86_64
unsigned long fsbase;
unsigned long gsbase;
......
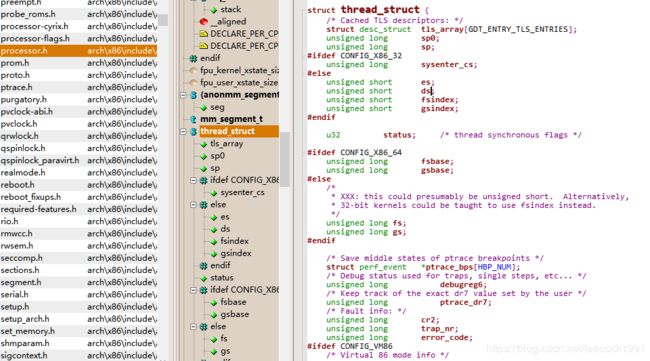
所谓的进程切换,就是将某个进程的 thread_struct 里面的寄存器的值,写入到 CPU 的 TR 指向的 tss_struct,对于 CPU 来讲,这就算是完成了切换。
指令指针的保存与恢复
盘点进程切换中的用户栈和内核栈以及相关指针
从进程 A 切换到进程 B
用户栈
在切换内存空间的时候,用户栈已切换。每个进程的用户栈都是独立的,都在内存空间里面
内核栈
在 __switch_to 里面切换了,也就是将 current_task 指向当前的 task_struct。里面的 void *stack 指针,指向的就是当前的内核栈。
内核栈的栈顶指针
在 __switch_to_asm 里面已经切换了栈顶指针,并且将栈顶指针在 __switch_to 加载到了 TSS 里面。
用户栈的栈顶指针
如果当前在内核里面的话,它是在内核栈顶部的 pt_regs 结构里面,当从内核返回用户态运行的时候,pt_regs 里面有所有当时在用户态的时候运行的上下文信息得以恢复
指令指针寄存器
指令指针寄存器指向下一条指令
进程的调度都最终会调用到 __schedule 函数,假设进程 A 在用户态是要写一个文件
写文件需要通过系统调用到达内核态,在这个切换的过程中,用户态的指令指针寄存器是保存在 pt_regs 里面的
到了内核态,一步一步执行中发现写文件需要等待,于是就调用 __schedule 函数进行主动调度,这个时候,进程 A 在内核态的指令指针是指向 __schedule 了,A 进程的内核栈会保存这个 __schedule 的调用,而且知道这是从 btrfs_wait_for_no_snapshoting_writes 这个函数里面进去的
__schedule 里面经过层层调用,到达了 context_switch 的最后三行指令
\kernel\sched\core.c
/* Here we just switch the register state and the stack. */
switch_to(prev, next, prev);
barrier();
return finish_task_switch(prev);

barrier 语句是一个编译器指令,用于保证 switch_to 和 finish_task_switch的执行顺序,不会因为编译阶段优化而改变
当进程 A 在内核里面执行 switch_to 的时候,内核态的指令指针也是指向这一行的
但是在switch_to 里面,将寄存器和栈都切换到成了进程 B 的,唯一没有变的就是指令指针寄存器。
当 switch_to 返回的时候,指令指针寄存器指向了下一条语句 finish_task_switch
但这个时候的 finish_task_switch 已经不是进程 A 的 finish_task_switch 了,而是进程 B 的 finish_task_switch 了。
进程的调度都最终会调用到 __schedule 函数,那么之前B 进程被别人切换走的时候,也是调用 __schedule,也是调用到 switch_to,B 进程之前的下一个指令也是 finish_task_switch,这次切换回来指令指针指到这里是没有错的。
从 finish_task_switch 完毕后,返回 __schedule 的调用了,返回到哪里呢?按照函数返回的原理,当然是从内核栈里面去找,由于这时内核栈已切换为B进程的内核栈,所以就不是返回A进程的 btrfs_wait_for_no_snapshoting_writes ,而是B进程之前被切换的那一时刻内核栈中的函数
假设,B 就是最前面例子里面调用 tap_do_read 读网卡的进程
之前调用 __schedule 的时候,是从 tap_do_read 这个函数调用进去的。那么B 进程的内核栈里面放的是 tap_do_read,于是,从A进程 __schedule 返回之后,是接着 tap_do_read 运行。最后B进程内核执行完毕返回用户态,同样恢复B进程的 pt_regs,恢复B进程用户态的指令指针寄存器,从B进程用户态接着运行。

参考资料:
趣谈Linux操作系统(极客时间)链接:
http://gk.link/a/10iXZ
欢迎大家来一起交流学习