模糊PID控制在自动光电整纬装置中的应用
模糊PID控制在自动光电整纬装置中的应用
摘要:针对纺织品在运行过程中的变形是非线性、时变的特点,提出一种新型自动整纬装置的设计方法。采用高性能的TMS320LF2407A芯片作为主处理单元,软件采用自适应模糊PID控制,着重介绍模糊PID控制器的设计方法。实践表明,该仪器能对薄型、中厚型纯棉或混纺织物及其染色织物的纬斜、纬弯进行自动检测,并实现自动整纬,整纬精度达到国家标准优等品要求。
关键词:光电整纬装置;模糊PID;DSP
0. 引言
整纬装置是纠正纺织品在染整过程中由于工艺因素产生的纬纱变形不可缺少的设备。纺织品染整工艺中,由于织物在运行过程中的变形是不确定的、非线性的、时变的,而且不同织物弹性、摩擦系数等性能不同,目前国内生产的整纬装置存在稳定性差、品种适应性差等缺点,整纬精度不能完全满足行业需求。现采用高性能的TMS320LF2407A芯片作为主处理单元,软件采用自适应模糊PlD控制,大大提高了整纬装置的整纬精度和稳定性,取得了良好的效果。
1. 系统总体设计及工作原理
新型自动光电整纬装置是集光、机、电一体化的技术含量较高的纺织仪器。该装置能对薄型、中厚型纯棉或混纺织物及其染色织物的纬斜、纬弯进行自动检测.经计算机处理,实现自动整纬。
1.1 系统结构
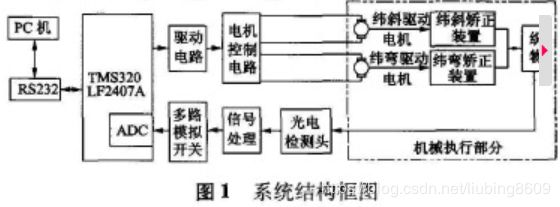
自动光电整纬装置由三大部分组成,系统结构框图如图l所示。图1中,以DSP为核心处理器的数据采集及处理部分主要包括DSP、输出驱动电路、电机控制电路、光电检测头(四只)、信号处理电路以及多路模拟开关等;以PC机处理显示部分主要由PC机构成,完成参数设定、实时显示织物运行状态等;机械执行部分主要由直流伺服电动机及矫正装置组成。
1.2 工作原理
光电检测头采用光电透射式检测方式,将织物纬纱的影像通过光学系统成像到集成光电池上。四只光电检测头内各有一只集成硅光电池,每只硅光电池集成13片长条形硅光电池,与水平成-6°~+6°排列。当纬纱像的斜度与某一光电池相等或相近时,光电池条输出信号幅度最大,其它各路电池输出信号较小,则输出信号最大者,其对应角度即为织物纬纱偏角大小。
当测速电机输出电压达到起始值(织物行进速度≥5 m/s)时,四只检测头的52路(13×4)硅光电池上的光信号经光电转换后得到电流信号,电流信号分别经过滤波、放大、整流等信号处理后,输出适合ADC处理的电压信号。这些信号在DSP发出的控制信号作用下,通过网个十六路模拟开关CD4067的输出脚经过一个射极跟随器后,依次分时送TMS320LF2407A自带的A/D转换器转换为数字信号。DSP按数值大小,先确定各检测头所反映的纬纱度数,一方面通过RS232通讯方式传给PC机显示,另一方面经“纬纱综合处理程序”得到纬纱变形信号,即纬斜、纬弯量值大小。由于光电检测头检测的是经过矫正装置矫正后的纬纱变形数值,因而所得数值即为偏差e。经过几个采集周期后,获得偏差变化率ec:以e和ec为输入量,经过TMS320LF2407A内模糊PID控制器运算,分别获得纬斜、纬弯的控制输出量。该量再经过驱动电路(74LS366、MCL413)、电机控制电路(多谐振荡器、可控硅驱动电路),分别驱动纬斜、纬弯直流电动机,带动纬斜、纬弯矫正装置实施矫正。由于织物的状态随时改变,所以矫正装置始终在做相应的转动,保证剩余纬纱偏差不大于2%。
2. 模糊PID控制器的设计
2.1 模糊PID控制结构图
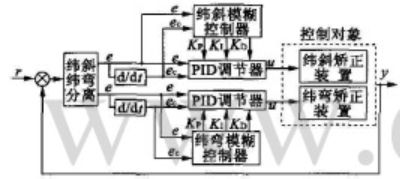
模糊PID控制器结构如图2所示。.纬纱信息输入量经过纬纱综合处理程序,将纬斜、纬弯偏差分离。本装置实际需要设计纬斜、纬弯两个模糊PID控制器。为了克服模糊推理时实时计算量大的缺点,图2中纬斜模糊控制器、纬弯模糊控制器已将一系列模糊控制规则离线转化为相应查询表,利用纬斜、纬弯偏差和偏差变化率对参数KP、KI、KD三个参数进行在线调整,经增量式PID控制算式计算获得控制量u,控制矫正装置对织物实施矫正。两个模糊PID控制器设计方法相同,下面仅以纬斜模糊PID控制器为例加以说明。
2.2 变量的模糊化
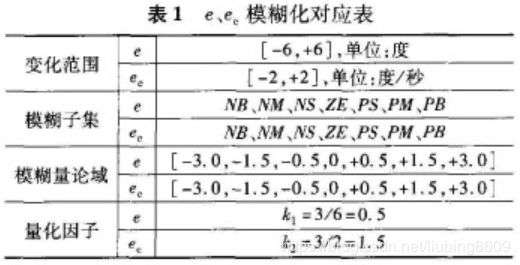
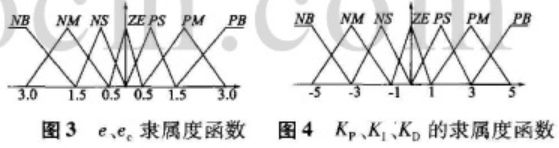
把输入变量值e和ec经过模糊化处理而变化成模糊量论域上的值,将输入数据转换化成合适的语言值,这种过程称为“模糊化”。这里就是把e、ec分别乘以量化比例因子k1、k2。e、ec的实际变化范围、模糊子集、量化因子等如表1所示。e、ec模糊语言值取 “负大”(NB)、“负中”(NM)、“负小” (NS)、“零” (ZE)、“正小” (PS)、“正中” (PM)、“正大”(PB)共七个值,隶属函数采用三角形,如图3所示。
同样,对输出变量KP、KI、KD模糊语言值取NB、NM、NS、ZE、PS、PM、PB共七个值,模糊量论域:[-5,-3,-1,0,+1,+3,+5],其隶属函数采用三角形,如图4所示。根据以往数据经验,KP量化到(10,30)内,K1量化到(0,7)内,KD量化到(0,4)内。
2.3 模糊规则及模糊推理
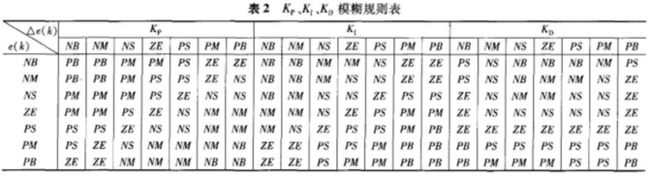
模糊控制规则主要基于操作人员长期积累的经验,针对KP、KI、KD三个参数分别整定的模糊控制表如表2所示。
2.4 清晰化计算
通过模糊推理得到的是模糊量,而对于实际的控制则必须为清晰量,网此需要将模糊量转化为清晰量,这就是清晰化计算所要完成的任务。清晰化计算的方法有最大隶属度法、中位数法和加权平均法。本设计采用加权平均法,这种方法取μc(z)的加权平均值为z的清晰值,即:
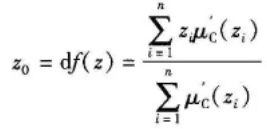
据此,可算出不同e、ec组合时KP0、KI0、KD0清晰量的实时查询表,经过尺度变换后得到实际控制量KP、KI、KD,再用常规PID公式计算,即可获得纬斜、纬弯装置的实际控制量。
3. 测试结果
为评定自动光电整纬装置的整纬效果,现场从PC机显示屏观测,每隔5 s纪录一次各光电检测头纬斜数据,连续检测18次,如表3所示。
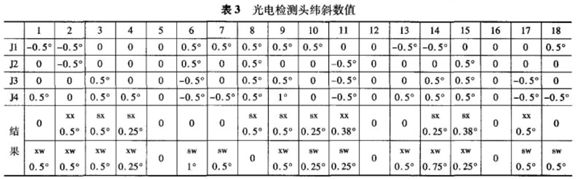
按国家标准《机织物与针织物纬斜和弓纬试验方法》及《棉印染布》技术要求规定,一般织物的花斜或纬斜不大于4%,条格织物花斜或纬斜不大于3%即为优等品,电脑光电整纬装置企业标准也是现在市场上普遍认可的标准,花斜或纬斜不大于2%即纬斜量和纬弯量中最大者不大于1.15°。
从表3的18次检测结果来看,18次检测均合格,即合格率为100%。并且,纬斜不大于1.5%的概率为94.4%;纬斜不大于1%的概率为88.89%,远远高于国家标准要求。采用传统控制方式时,整纬装置只能保证平均85.1%时间内纬斜小于2%;91.48%时间内小于3%。采用模糊PID控制方式后,产品整纬精度得到了明显提高。
4. 结语
由于织物纬纱变形是不确定的、非线性的、时变的,对于不同织物常规PID控制器的参数往往整定不良、性能欠佳。将模糊算法和PID控制相结合,设计了基于工业级PC机和高性能TMS320LF2407A芯片为硬件基础,软件采用模糊HD控制的自动光电整纬装置,适用织物品种广,整纬精度达到国家标准优等品要求,具有良好的应用前景。
【转载】http://www.docin.com/p-302000991.html