ROS下搭建仿真模拟环境,编程控制小车,按照给定赛道完成比赛
文章目录
- 一、下载包以及编译
- 1、下载源码包
- 2、编译
- 3、错误解决
- (1)、controllers相关
- (2)、driver_base相关
- (3)、ackermann_msgs相关
- (4)、Could not find a package configuration file provided by "OpenCV"
- (5)、findLine.cpp找不到头文件
- 二、启动仿真
- 1、运行小车模型
- 2、运行赛道
- 三、自己建立赛道
- 1、建立与保存地图
- 2、修改文件
- 四、通过自己建立的赛道进行gmapping建图
- 1、gmapping建图
- 2、保存地图
- 五、小车进行导航运动
- 1、通过WASD控制小车运动
- 2、小车导航运动
一、下载包以及编译
1、下载源码包
我是使用的别人github上开源出来的代码
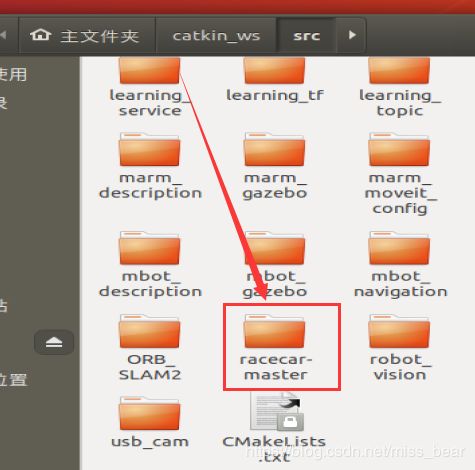
进入到你的ros工作空间下的src文件下,打开终端,下载源码包
git clone https://github.com/xmy0916/racecar.git
2、编译
进入到工作空间下
cd catkin_ws/
catkin_make
3、错误解决
这时候编译会遇到许多错误,依次解决吧
主要安装的版本需要与你自己的ubuntu版本相对应,我的ubuntu版本是18,下面装的都是melodic,16的话改成kinetic即可
(1)、controllers相关
sudo apt-get install ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-effort-controllers
sudo apt-get install ros-melodic-joint-state-controller
(2)、driver_base相关
sudo apt-get install ros-melodic-driver-base
(3)、ackermann_msgs相关
sudo apt-get install ros-melodic-ackermann-msgs
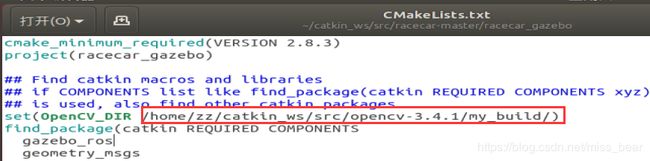
(4)、Could not find a package configuration file provided by “OpenCV”
通过执行下面代码得到opencv的路径
locate OpenCVConfig.cmake
应该会得到多条路径,选择结尾为OpenCVConfig.cmake的
执行
gedit ~/catkin_ws/src/racecar-master/racecar_gazebo/CMakeLists.txt
修改第七行为你的opencv路径
(5)、findLine.cpp找不到头文件

打开这个cpp文件,修改头文件
将
#include 替换成
#include 二、启动仿真
1、运行小车模型
roslaunch racecar_gazebo racecar.launch
这时回启动gazebo,在里面可以看到一个小车的模型

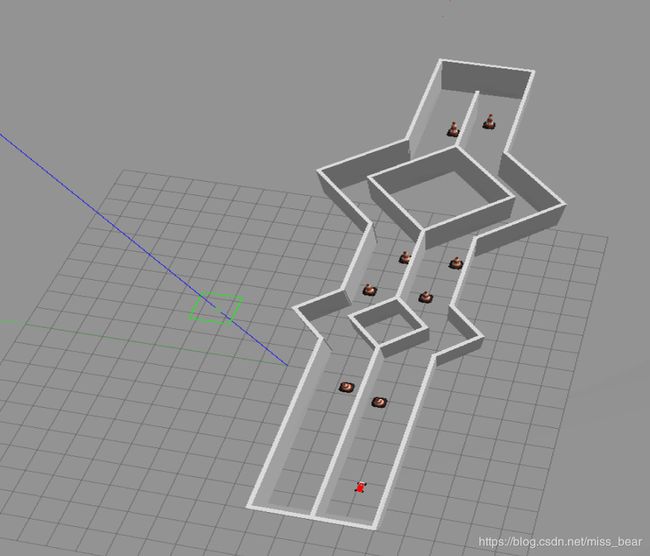
2、运行赛道
运行出来的地图是作者已经做好的,我们后续可以自己创建地图
roslaunch racecar_gazebo racecar_runway.launch
三、自己建立赛道
1、建立与保存地图
运行
gazebo

将建立好的地图保存
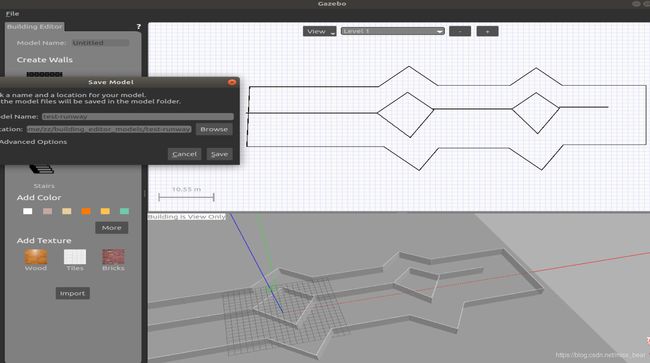
关闭gazebo,随后在重新启动一次,选择前面保存好的模型

注意坐标点落在模型中的位置
在地图中加入障碍物

保存地图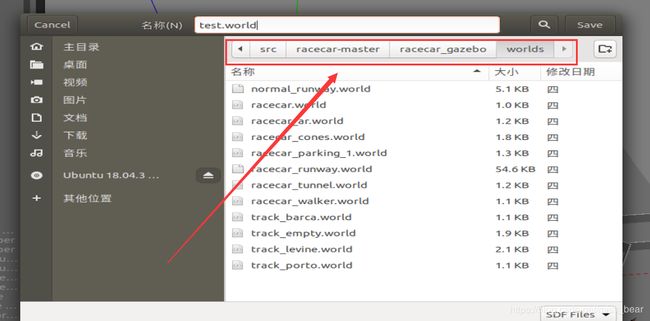
2、修改文件
将地图名字改为你保存好的地图名

再次运行赛道,就可以看到已经是你自己建立的赛道了

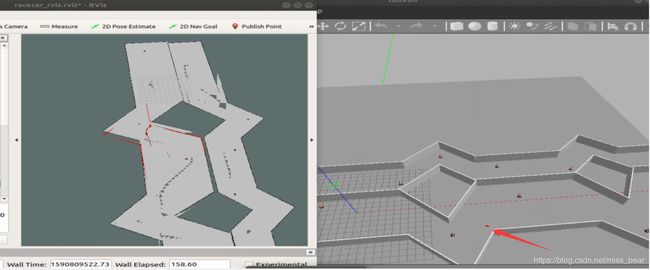
四、通过自己建立的赛道进行gmapping建图
1、gmapping建图
运行
roslaunch racecar_gazebo slam_gmapping.launch
roslaunch racecar_gazebo racecar_runway_navigation.launch

通过WASD控制小车运动,来建图,不过小车运行比较慢,完整建立花费时间比较长


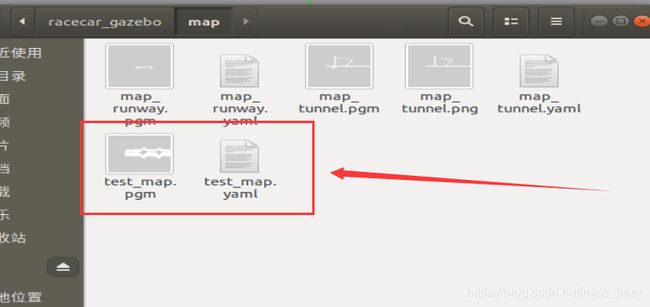
2、保存地图
rosrun map_server map_saver -f test_map
这两个文件会保存在你的主目录下,如/home/xx/下,需要将这两个文件文件复制到map文件下
五、小车进行导航运动
1、通过WASD控制小车运动
修改文件

启动导航和环境地图,启动rviz
roslaunch racecar_gazebo racecar_rviz.launch
roslaunch racecar_gazebo racecar_runway_navigation.launch
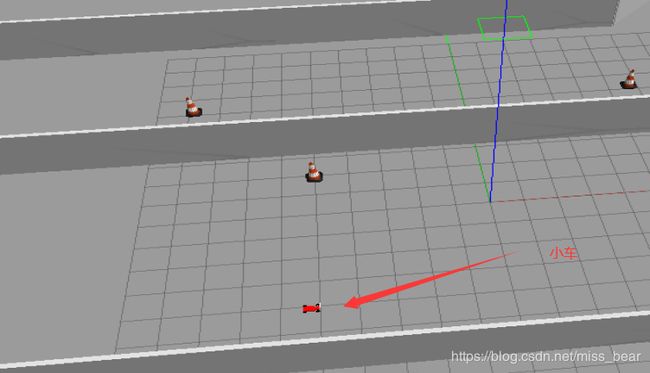

控制小车运行过后
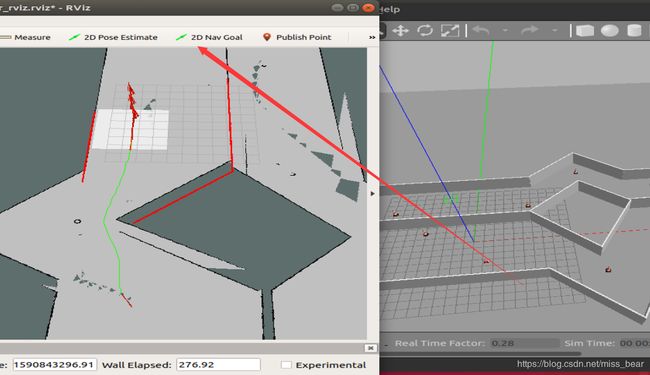
2、小车导航运动
安装
sudo apt-get install ros-melodic-teb-local-planner
启动导航和环境地图,启动rviz
roslaunch racecar_gazebo racecar_rviz.launch
roslaunch racecar_gazebo racecar_runway_navigation.launch
在启动py文件
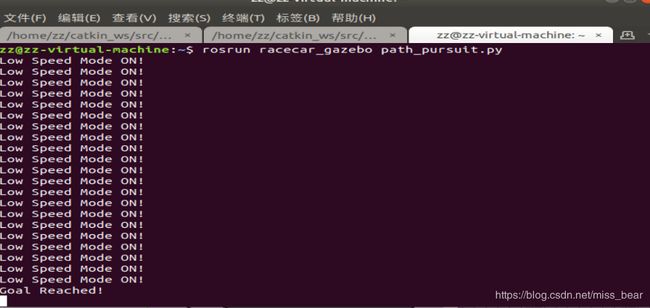
rosrun racecar_gazebo path_pursuit.py
接着在rviz中选择2D Nav Goal给小车发布运动位置小车即可运动(但是运动速度堪忧!!慢的不行。再想想怎么提速吧!!)



到达目的后终端会显示信息
参考链接
个人博客链接