Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping ,2019
Laboratory for In-formation & Decision Systems (LIDS), Massachusetts Institute of Technology, Cambridge
Kimera was partially funded by the DCISTCollaborative Research Alliance,MIT Lincoln Laboratory
代码地址:https://github.com/MIT-SPARK/Kimera
RGB, 双目
论文总结和摘要:
Kimera是一个开源的C++实时语义SLAM系统,提供了:
-
视觉惯性状态估计(VIO模块)
-
全局一致的相机轨迹估计(姿态图优化器,PGO)
-
用于快速避障的低延时的局部网格地图(轻量级的3D网格重建模块)
-
全局语义标注的3D网格地图(稠密的3D语义重建模块)
作者在设计之初使用模块化的思想来设计的SLAM系统,因此Kimera可以单独分解为VIO系统或者完整的SLAM系统.
首先解释下Metric-semantic understanding的概念: 在估计场景的三维几何的同时预测目标和场景结构的语义标签.Kimera 集成了VIO,网格重建、语义理解等多个功能,适用于Metric-semantic understanding的任务
此外,Kimera以RGB 作为输入,运行在CPU上,因此其部署难度相对较小.
论文方法介绍:
Kimera提供了:
- 精确的状态估计(at IMU rate)
- 全局轨迹估计
- 多个环境mesh图(轻量局部mesh以及全局语义mesh)
Kimera使用多线程实现(4线程):
- 线程1: 运行Kimera-VIO前端, 输入Stereo图像和IMU数据, 输出跟踪特征和预集成的IMU测量值,以及IMU的状态估计.
- 线程2: 运行Kimera-VIO后端和Kimera-mesher, 分别输出优化后的状态估计, 以及低延迟的单帧和多帧的mesh图.
- 线程3: 运行Kimera-RPGO, 负责进行闭环检测, 去除噪声离群值, 预测全局一致的轨迹.如图2(a)
- 线程4: 运行Kimera-Semantics, 输入为稠密的stereo以及语义标签, 输出metric-semantic mesh
线程1,2能够得到图2(b)中的单帧网格(若有语义标签则得到图2©的结果),以及图2(d)中的多帧网格
线程3,4以较慢的速度运行, 主要为了支持一些低速的功能, 如导航和规划等.
模块介绍:
Kimera-VIO: Visual-Inertial Odometry Module (视觉惯性里程计模块)
VIO使用论文**《On-manifold preintegration theory for fast and accurate visual-inertial navigation》**中的方法,并扩展到了单目和双目图像数据上。VIO分为前端和后端:
-
VIO前端:
负责处理原始的传感器数据(IMU+vision)
- IMU前端:执行流形预积分(on-manifold preintegration,详见前述黑体论文),从原始IMU数据中获得两个连续关键帧之间相对状态的紧凑预积分测量。
- Vision前端:检测 Shi-Tomasi 角点, 使用Lukas-Kanade tracker进行帧间搜索,对双目数据进行匹配,然后几何验证。这里检测角点 、双目匹配以及几何验证都是在关键帧上运行,在中间帧只进行特征追踪。
-
VIO后端
负责融合经过处理的各种测量量,生成传感器的状态预测(位姿,速度,偏移等)
在每一关键帧,IMU数据和视觉数据会被整合到一个固定滞后的平滑器中, 该平滑器是一个"factor graph",使用 GTSAM 中的iSAM2即可得到。这里引用了很多论文的方法,最后得到了观测特征的3D坐标,去除了视差不足或离群的点,并使用GTSAM将超出平滑范围的状态边缘化。
Kimera-RPGO: Robust Pose Graph Optimization Module
负责检测闭环、计算关键帧位姿。
-
闭环检测:基于DBoW2 ,并使用词袋模型快速检测闭环。对每一个可能的闭环进行单目和双目验证, 剔除一些离群闭环,将剩余的闭环交由PGO solver 解决。
-
鲁棒的PGO(pose graph optimizer):
该模块在GTSAM(《Factor graphs and GTSAM: A hands-on introduction》)中实现,并使用 增量一致测量集最大化方法(Incremental Consistent Measurement Set Maximization,PCM,《Pairwise consistent measurement set maximization for robust multi-robot map merging》)来剔除异常值。
实际中分别存储里程数边缘(由Kimera-VIO产生)和闭环(由闭环检测产生);每次执行PGO时,首先使用修改后的PCM选择最大的一组一致闭环, 然后在姿势图上执行GTSAM,包括里程计和一致的循环闭合。
Kimera-Mesher: 3D Mesh Reconstruction
该mesher模块可以快速生成两个3D mesh: 逐帧的mesh, 以及多帧的mesh
-
逐帧mesh:根据VIO前端生成的当前帧的2D特征, 执行二维的Delaunay 三角测量, 然后将其反投影得到三维mesh. 该mesh被用于低延迟的避障任务, 作者为此设计了根据2D label对mesh进行纹理处理的功能.(“Delaunay三角测量” 见论文《Incremental visual-inertial 3D mesh generation with structural regularities》)
-
多帧mesh:
融合了逐帧mesh的最终mesh,并对平面进行了规整。mesh网格是以一个顶点位置列表和一个描述三角形面的三个顶点ID列表来编码的。论文中根据列表来将逐帧mesh融合到多帧mesh中。
Kimera-Semantics: Metric-Semantic Segmentation
采用了《“Voxblox: Incremental 3d euclidean signed distance fields for on-board mav planning》中介绍的捆绑式光线投射(bundled raycasting)技术,实现了:建立精确的全局三维网格(覆盖整个轨迹)以及语义标注mesh。
-
全局mesh:
首先使用dense stereo 方法(semi-global matching,《Stereo processing by semiglobal matching andmutual information》)从双目数据中得到三维点云。
然后在每一关键帧上使用bundled raycasting方法得到TSFD,从中使用marching cube算法提取mesh
-
语义标注:
使用现成的像素级二维语义分割工具(深度神经网络,或经典的条件随机场方法),可以得到二维语义标签,然后将标签附加到dense stereo图生成的每个三维点上。
在光线投射(bundled raycasting)时还投射了语义标签,对于光线投射中的每束光线,根据束中观察到的标签的频率建立一个标签概率向量。然后,仅在TSDF截断距离(即接近表面)内传播该信息,以节省计算时间,最后使用贝叶斯更新更新每个体素的标签概率。
在这个语义光线投射之后,每个体素都有一个标签概率向量,从中选择概率最大的标签。
最后利用marching cubes算法提取语义mesh,该mesh比Kimera-mesher生成的多帧mesh更加精确,但速度更慢。(> 1.0s)
Debugging Tools:
Kimera提供了一套开源的评估工具,用于VIO、SLAM和度量语义重建的调试、可视化和基准测试。此外,还提供了Jupyter notebook用于可视化中间VIO统计数据(例如,特征轨迹的质量、IMU预集成错误),以及使用Open3D自动评估3D重建的质量。
实验结果和分析:
A. Pose Estimation Performance 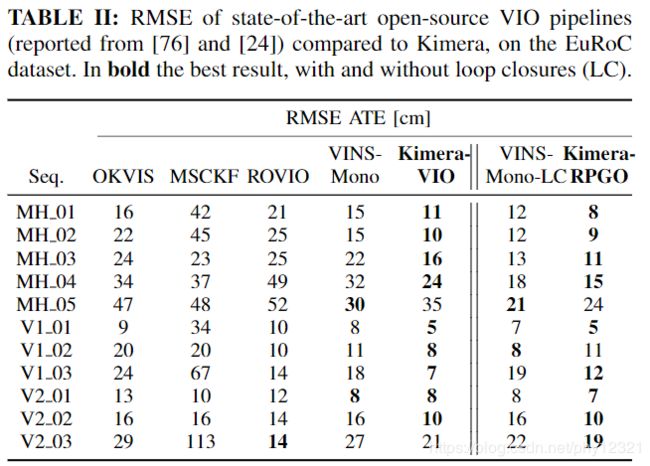
结论:SOTA 的状态估计性能,以及对于闭环参数的tuning非常不敏感,更加鲁棒
为了 验证RPGO模块对参数的不敏感性,作者另外设计了一个对比实验,分别使用PCM来拒绝异常值和不使用PCM两组,计算这两组在不同的闭环阈值 α \alpha α下的误差:
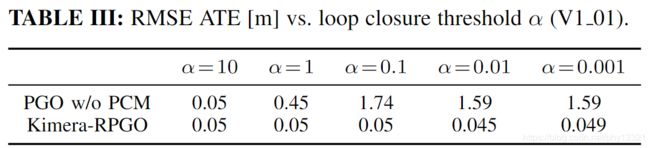
可见RPGO模块对于不同的闭环阈值几乎没有收到影响。
B. Geometric Reconstruction
两个着色图直观的表示了kimera-semantics模块重建的mesh的精确性和完备性
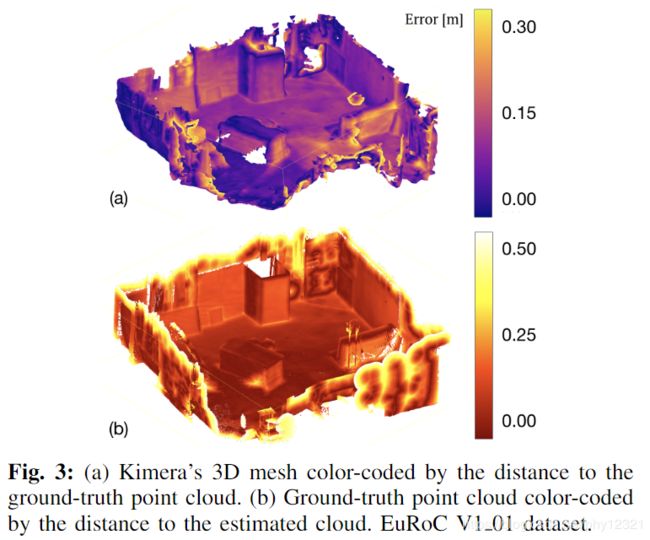
作者还评估了Kimera-mesher重建的多帧mesh和Kimera-semantics重建的global mesh之间的精确性差别:

注意,虽然Kimera-mesher精度低,但是计算所需的时间要少两个数量级
C. Semantic Reconstruction
Kimera-semantics模块用到了bundled raycasting,pose estimate(from Kimera-VIO), depth maps
为次作者设计了三个对比实验:
- 使用pose和depth maps 的真值,评估bundled raycasting的性能损失
- 使用depth maps的真值,评估bundled raycasting 和pose (from Kimera-VIO)的性能损失
- 使用bundled raycasting,pose estimate(from Kimera-VIO), dense stereo,即完整的Kimera系统。
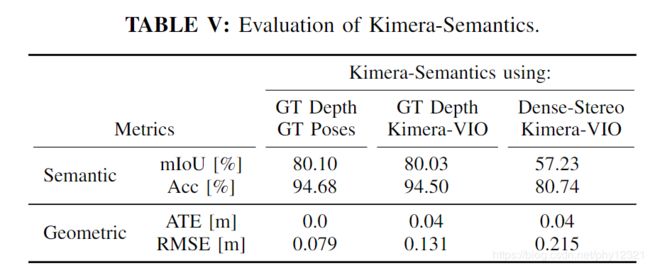
结论:
-
bundled raycasting 导致了语义和几何重建的很小的性能下降
-
Kimera VIO导致了性能损失,但是很小,因为VIO有一个小的漂移
-
最大的性能下降是由于dense stereo的使用,稠密立体[62]很难解决在模拟场景中很常见的无纹理区域的深度,例如墙壁。

混淆矩阵中的大值出现在墙/架和地板/墙之间,这正是密集立体效果最差的地方;没有纹理的墙壁很难重建,而且靠近架子和地板,导致几何和语义错误增加。
D. Timing 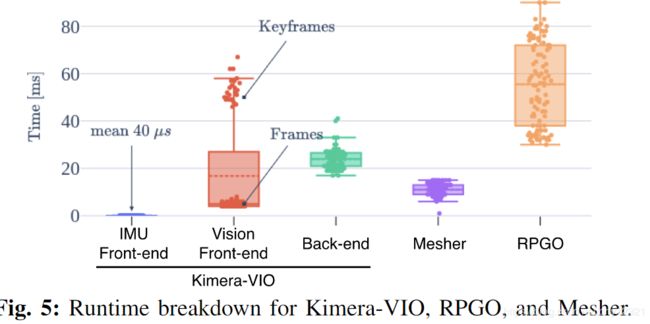
视觉前端模块显示为双侧分布,因为对于每一帧,只执行特征跟踪(平均4.5ms),而在关键帧速率下,执行特征检测、立体匹配和几何验证(平均45ms)。Kimera Mesher能够在5 ms内生成每帧3D网格,而构建多帧网格平均需要15 ms。Kimera VIO后端在不到40 ms的时间内解决了因子图优化问题。Kimera-RPGO和Kimera-semantics运行在较慢的线程上,因为它们的输出不需要用于时间关键的操作(例如控制、避障)。Kimera RPGO在EuRoC上的实验平均耗时55ms,但其运行时间通常取决于姿势图的大小。最后,Kimera semantics(为了清晰起见,图中未显示)使用平均1.28秒更新每个关键帧处的全局度量语义网格,融合720×480密集深度图像,作为我们的模拟器生成的图像。此外,使用快速光线投射方法,Kimera-semantics可以在100 ms内运行,无需语义注释。