基于ROS gmapping slam 建立地图时遇到的问题
基于ROS gmapping slam 建立地图时遇到的问题
- 遇到问题:
- 解决过程1
- 再遇问题
- 解决过程2
- 下面看 /tf_static 到底是个啥东西啊
遇到问题:
在 turtlebot3 的gazebo 仿真环境下
通过rosbag 保存tf 和scan 的信息,然后通过回放rosbag 里的内容
再通过 gmapping slam_gmapping 进行地图建立
建图过程中出现如下问题
[ WARN] [1584192934.752228918]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
![]()
解决过程1
意思是从odom 后面的信息都被丢弃了。 为什么丢弃,因为 tf 不对 。
$ rosrun rqt_tf_tree rqt_tf_tree
显示tf tree

额,到odom后面没有tf信息了。 urdf根本就没有发布啊。
看 turtlebot3 的launch文件 , 这里没有将 urdf 的 tf 信息发布
<!-- start robot state publisher -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
再运行仿真程序时 ,出来了理想的 tf tree
再遇问题
然后保存rosbag,再建图一次,还是报错。
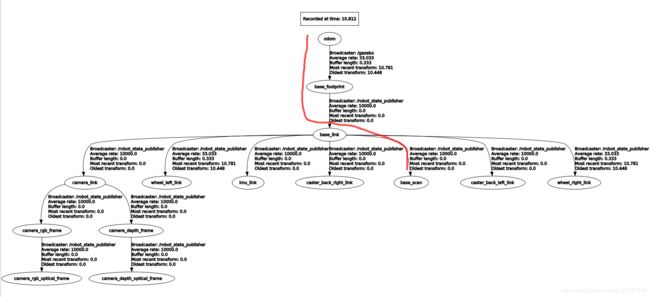
查看rosbag回放数据的tf tree。
就是在rosbag 回放数据的过程中,执行 指令
$ rosrun rqt_tf_tree rqt_tf_tree

额, base_footprint 和 base_link 为什么是断得.
并且其它传感器去哪了
解决过程2
现在得问题是 在gazebo运行时 tf 是对得 ,在 rosbag回放时tf 是错得
下面把 数据全部保存
rosbag record -O data_all.bag -a
然后看回放rosbag里的tf tree
是对的。
说明少订阅了什么内容,
查看所有topic

把 /tf_static 加上 ,中间试过了 加 /tf_staic 是不行的
rosbag 里面的 tf tree 终于对了
下面看 /tf_static 到底是个啥东西啊
ROS 的 tf 功能包有一个升级版本 tf2
这个 tf_static 就是 tf2 中多的功能
具体可以看官网的解释
tf2 Migration WIKI

这里的英文解释很模糊,实际上 tf_static 简单理解 就是 发布的一个锁存功能的tf。
锁存功能 就是订阅者可以订阅 发布者发布的最新的一次topic,而不是发布者发布了才能订阅。
tf::TransformListener 会订阅 /tf 和 /tf_static。
answers.ros.org 上有人解释说 :
Transforms on the /tf_static topic are assumed to never change and be valid for all timestamps.
tf_static 是假设不会改变的的坐标变换关系(例如fixed型的joint),可以被随时使用(就是锁存)。
假如一个坐标变换是固定的那么可以发布一次,之后随时就可以使用了。 当然如果固定的关系变了,那么可以再发一次。
这个是 tf2 相对于 tf 升级的一个功能。
根据上面的调试过程推断:
在 urdf 中的 joint ,假如是 fixed 的joint ,则会往发布 /tf_static 上发布
continue类型的joint 则会往 /tf 上发布
所以 base_footprint 和base_link是fixed 的关系,没有订阅 /tf_static 是断开的 ,轮子的link和base_link是continued ,订阅/tf就 可以连上
当订阅了 /tf_static 这个之后 , 激光、相机、IMU这种固定连接的就有了