图像语义分割-----SegNet学习笔记+tensorflow
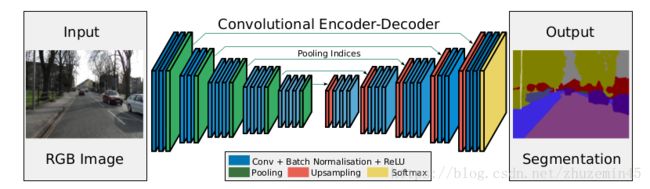
SegNet网络是一个像素级的语义分割模型,即会针对图像中的每一个像素,对每一个像素进行分类,去识别该像素属于的类别,整个网络分为4层下采样以及4层上采样,最后将一个[W, H, 3]的输入图像处理成[W, H, NUM_CLASSES]的向量,再通过softmax进行分类,转化为[W, H, 1]的张量,再对属于不同种类的像素分别涂上不同的颜色,从新变成[W, H, 3]的图像,但是其中的物体以不同的颜色进行了标记区分,这就是SegNet网络的功能:
代码地址:https://github.com/tkuanlun350/Tensorflow-SegNet
代码在model.py中完成了模型搭建,loss定义,以及训练方法,下面就分块记录其实现方式。
一、模型搭建
网络模型并不是很复杂,作者在搭建时将其分为了三个部分,由下向上依次是封装带L2正则化的变量定义,封装带bn层的卷积层与反卷积层定义,封装整个网络,下面也是分开来看:
1.1 变量声明封装
变量声明中又分为向量式变量与矩阵式变量,分别在Utils.py中定义如下:
# 很简单的直接初始化一个shape型向量
def _variable_on_cpu(name, shape, initializer):
with tf.device('/cpu:0'):
var = tf.get_variable(name, shape, initializer=initializer)
return var# 初始化一个带L2正则化的矩阵变量
def _variable_with_weight_decay(name, shape, initializer, wd):
# 先初始化一个shape型矩阵变量
var = _variable_on_cpu(
name,
shape,
initializer)
# 再根据权重,附加L2正则化并将其正则化loss加入总loss中
if wd is not None:
weight_decay = tf.multiply(tf.nn.l2_loss(var), wd, name='weight_loss')
tf.add_to_collection('losses', weight_decay)
return var1.2 卷积层与反卷积层封装
卷积层定义:
# 这里作者自己复现了卷积过程,对某一被卷积区域s,通过s*w + b来计算卷积结果
def conv_layer_with_bn(inputT, shape, train_phase, activation=True, name=None):
# 通过输出通道数目来确定b的维数
out_channel = shape[3]
# 初始化卷积核矩阵以及偏移变量
# 完成卷积计算
with tf.variable_scope(name) as scope:
kernel = _variable_with_weight_decay('ort_weights', shape=shape, initializer=orthogonal_initializer(), wd=None)
conv = tf.nn.conv2d(inputT, kernel, [1, 1, 1, 1], padding='SAME')
biases = _variable_on_cpu('biases', [out_channel], tf.constant_initializer(0.0))
bias = tf.nn.bias_add(conv, biases)
# 通过传入参数中是否使用激活函数标志位
# 输出bn层输出或者再通过一次relu激活函数
# bn层定义在下面介绍
if activation is True:
conv_out = tf.nn.relu(batch_norm_layer(bias, train_phase, scope.name))
else:
conv_out = batch_norm_layer(bias, train_phase, scope.name)
return conv_out# bn层在使用时需要确定是否在训练,因为bn层中本身有两个参数是需要训练的
# 非训练模式下,可以直接加载训练后的参数
def batch_norm_layer(inputT, is_training, scope):
return tf.cond(is_training,
lambda: tf.contrib.layers.batch_norm(inputT, is_training=True,
center=False, updates_collections=None, scope=scope+"_bn"),
lambda: tf.contrib.layers.batch_norm(inputT, is_training=False,
updates_collections=None, center=False, scope=scope+"_bn", reuse = True))反卷积定义:
def deconv_layer(inputT, f_shape, output_shape, stride=2, name=None):
strides = [1, stride, stride, 1]
with tf.variable_scope(name):
# 首先要用特殊的初始化方式来初始化卷积核,下面给出定义
weights = get_deconv_filter(f_shape)
# 进行反卷积操作,这里的反卷积定义可以自行查阅,大概就是先扩充再卷积
deconv = tf.nn.conv2d_transpose(inputT, weights, output_shape,
strides=strides, padding='SAME')
return deconvdef get_deconv_filter(f_shape):
# 此处所用的反卷积核都是2*2的核
# 其每个位置的参数的初始值由该参数的位置与矩阵尺寸确定,公式如下:
width = f_shape[0]
heigh = f_shape[0]
f = int(width/2.0)
c = (2 * f - 1 - f % 2) / (2.0 * f)
bilinear = np.zeros([f_shape[0], f_shape[1]])
for x in range(width):
for y in range(heigh):
value = (1 - abs(x / f - c)) * (1 - abs(y / f - c))
bilinear[x, y] = value
weights = np.zeros(f_shape)
# 由于此处的输入通道与输出通道数目一样,那么就只需要对每个卷积通道上的卷积核进行初始化
for i in range(f_shape[2]):
weights[:, :, i, i] = bilinear
# 利用计算得到的初始值来初始化反卷积核变量
init = tf.constant_initializer(value=weights,
dtype=tf.float32)
return tf.get_variable(name="up_filter", initializer=init,
shape=weights.shape)1.3 网络模型搭建
在这里首先要说明一下就是,在整个网络中,一共有八次卷积,4次最大池化以及4次反卷积,其中卷积都是在保持尺寸的模式下进行,而下采样与上采用全部通过池化和反卷积来实现。
def inference(images, labels, batch_size, phase_train):
# 从conv1到conv4 分别进行4次卷积,以及4次最大池化,得到[batch_num, W/16, H/16, 64]的特征图
# norm1
norm1 = tf.nn.lrn(images, depth_radius=5, bias=1.0, alpha=0.0001, beta=0.75,
name='norm1')
# conv1
conv1 = conv_layer_with_bn(norm1, [7, 7, images.get_shape().as_list()[3], 64], phase_train, name="conv1")
# pool1
pool1, pool1_indices = tf.nn.max_pool_with_argmax(conv1, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1],
padding='SAME', name='pool1')
# conv2
conv2 = conv_layer_with_bn(pool1, [7, 7, 64, 64], phase_train, name="conv2")
# pool2
pool2, pool2_indices = tf.nn.max_pool_with_argmax(conv2, ksize=[1, 2, 2, 1],
strides=[1, 2, 2, 1], padding='SAME', name='pool2')
# conv3
conv3 = conv_layer_with_bn(pool2, [7, 7, 64, 64], phase_train, name="conv3")
# pool3
pool3, pool3_indices = tf.nn.max_pool_with_argmax(conv3, ksize=[1, 2, 2, 1],
strides=[1, 2, 2, 1], padding='SAME', name='pool3')
# conv4
conv4 = conv_layer_with_bn(pool3, [7, 7, 64, 64], phase_train, name="conv4")
# pool4
pool4, pool4_indices = tf.nn.max_pool_with_argmax(conv4, ksize=[1, 2, 2, 1],
strides=[1, 2, 2, 1], padding='SAME', name='pool4')
""" End of encoder """
""" start upsample """
# upsample4
# 可选择的针对不同尺寸的输出通过池化操作进行归一化
# 然后通过upsample4到upsample1进行4次反卷积与卷积操作,得到[batch_num, W, H, 64]的输出
# upsample4 = upsample_with_pool_indices(pool4, pool4_indices, pool4.get_shape(), out_w=45, out_h=60, scale=2, name='upsample4')
upsample4 = deconv_layer(pool4, [2, 2, 64, 64], [batch_size, 45, 60, 64], 2, "up4")
# decode 4
conv_decode4 = conv_layer_with_bn(upsample4, [7, 7, 64, 64], phase_train, False, name="conv_decode4")
# upsample 3
upsample3= deconv_layer(conv_decode4, [2, 2, 64, 64], [batch_size, 90, 120, 64], 2, "up3")
# decode 3
conv_decode3 = conv_layer_with_bn(upsample3, [7, 7, 64, 64], phase_train, False, name="conv_decode3")
# upsample2
upsample2= deconv_layer(conv_decode3, [2, 2, 64, 64], [batch_size, 180, 240, 64], 2, "up2")
# decode 2
conv_decode2 = conv_layer_with_bn(upsample2, [7, 7, 64, 64], phase_train, False, name="conv_decode2")
# upsample1
upsample1= deconv_layer(conv_decode2, [2, 2, 64, 64], [batch_size, 360, 480, 64], 2, "up1")
# decode4
conv_decode1 = conv_layer_with_bn(upsample1, [7, 7, 64, 64], phase_train, False, name="conv_decode1")
""" end of Decode """
""" Start Classify """
# 通过最后一次卷积操作,得到[batch_num, W, H, NUM_CLASSES]的输出结果作为预测值
with tf.variable_scope('conv_classifier') as scope:
# 初始化卷积变量并进行卷积
kernel = _variable_with_weight_decay('weights',
shape=[1, 1, 64, NUM_CLASSES],
initializer=msra_initializer(1, 64),
wd=0.0005)
conv = tf.nn.conv2d(conv_decode1, kernel, [1, 1, 1, 1], padding='SAME')
biases = _variable_on_cpu('biases', [NUM_CLASSES], tf.constant_initializer(0.0))
conv_classifier = tf.nn.bias_add(conv, biases, name=scope.name)
# 即为预测值,通过后续的softmax既可以对每一个像素进行分类
logit = conv_classifier
# 通过计算logit与labels间的交叉熵来得到loss,当然这里的loss也综合了bn层loss以及L2正则化loss
loss = cal_loss(conv_classifier, labels)
return loss, logit二、loss定义
这里可以这样理解segnet:针对一副图片,假如其有100个像素,那么segnet的功能就是对这幅图片的100个像素,进行100次分类,由于类别信息以one-hot的形式给出,所以loss就是预测值与真值间的交叉熵。
def cal_loss(logits, labels):
# 考虑到大目标占的像素多,其交叉熵和也较大,因此对应不同物体设定不同的权重
# 其中面积大的目标权重小,而小物体的权重则要大一些
loss_weight = np.array([
0.2595,
0.1826,
4.5640,
0.1417,
0.9051,
0.3826,
9.6446,
1.8418,
0.6823,
6.2478,
7.3614,
1.0974]) # class 0~11
labels = tf.cast(labels, tf.int32)
# return loss(logits, labels)
# 通过weigted_loss计算交叉熵以及统计总loss,下面给出其定义
return weighted_loss(logits, labels, num_classes=NUM_CLASSES, head=loss_weight)def weighted_loss(logits, labels, num_classes, head=None):
""" median-frequency re-weighting """
with tf.name_scope('loss'):
# 首先把logits整理成[batch_num*W*H, num_classes]格式,分别后续计算
logits = tf.reshape(logits, (-1, num_classes))
# epsilon的作用就是防止0的出现,因为log0是无穷,肯定不可以让他出现
epsilon = tf.constant(value=1e-10)
# 对预测值都加上epsilon来防止0的出现
logits = logits + epsilon
# consturct one-hot label array
# 下面的两步将类别标签也整理成[batch_num*W*H, num_classes]格式
label_flat = tf.reshape(labels, (-1, 1))
# should be [batch ,num_classes]
labels = tf.reshape(tf.one_hot(label_flat, depth=num_classes), (-1, num_classes))
# 对预测值进行softmax
softmax = tf.nn.softmax(logits)
# 下面的两步就是一个带权重的交叉熵计算
cross_entropy = -tf.reduce_sum(tf.multiply(labels * tf.log(softmax + epsilon), head), axis=[1])
cross_entropy_mean = tf.reduce_mean(cross_entropy, name='cross_entropy')
# 将预测loss加入总的loss
tf.add_to_collection('losses', cross_entropy_mean)
# 提取全部loss,这里就包含了L2正则化loss以及bn层loss
loss = tf.add_n(tf.get_collection('losses'), name='total_loss')
return loss三、训练方法
首先来看一下优化器的定义
def train(total_loss, global_step):
total_sample = 274
num_batches_per_epoch = 274/1
""" fix lr """
lr = INITIAL_LEARNING_RATE
loss_averages_op = _add_loss_summaries(total_loss)
# Compute gradients.
# 在计算梯度应用梯度前,先做一步loss收集,这里仅供记录用
with tf.control_dependencies([loss_averages_op]):
# 调用确定学习率lr的adam优化器
opt = tf.train.AdamOptimizer(lr)
# 根据当前loss计算优化梯度
grads = opt.compute_gradients(total_loss)
# 将优化梯度应用至各个变量上,注意apply_gradients也是自带使global_step自动加一的功能
apply_gradient_op = opt.apply_gradients(grads, global_step=global_step)
# Add histograms for trainable variables.
for var in tf.trainable_variables():
tf.summary.histogram(var.op.name, var)
# Add histograms for gradients.
for grad, var in grads:
if grad is not None:
tf.summary.histogram(var.op.name + '/gradients', grad)
# Track the moving averages of all trainable variables.
variable_averages = tf.train.ExponentialMovingAverage(
MOVING_AVERAGE_DECAY, global_step)
variables_averages_op = variable_averages.apply(tf.trainable_variables())
# 这里看到运行train_op之前就会先计算loss梯度并优化和计算滑动平均
# 所以针对一次训练,传入样本和标签后,run一次train_op就是训练了一步
with tf.control_dependencies([apply_gradient_op, variables_averages_op]):
train_op = tf.no_op(name='train')
return train_op然后看一下样本是如何加载的,这里大概说一下,样本由三部分组成,一个txt和两个文件夹,txt中每一行按顺序放的是原图和类别图地址,另外两个文件夹中就是放的对应的图片,类别图就是每一个像素的值,都是原图中对应位置像素的类别代号(比如自行车是10,那类别图对应原图直行车的地方就全是像素10)
样本的加载函数都在Inputs.py中得到实现,代码很简单易懂,就是读txt中每行的两个路径,再分别读出来其图片,作为images和labels,再通过使用tf.train.batch()函数来生成每一个batch,这里就不在累述。
直接看training函数:
def training(FLAGS, is_finetune=False):
# 下面的都是一些设置系数,其中几个地址就是样本集的存放地址,可以看情况来更改
max_steps = FLAGS.max_steps
batch_size = FLAGS.batch_size
train_dir = FLAGS.log_dir # /tmp3/first350/TensorFlow/Logs
image_dir = FLAGS.image_dir # /tmp3/first350/SegNet-Tutorial/CamVid/train.txt
val_dir = FLAGS.val_dir # /tmp3/first350/SegNet-Tutorial/CamVid/val.txt
finetune_ckpt = FLAGS.finetune
image_w = FLAGS.image_w
image_h = FLAGS.image_h
image_c = FLAGS.image_c
# should be changed if your model stored by different convention
startstep = 0 if not is_finetune else int(FLAGS.finetune.split('-')[-1])
# 先成对读取样本与标签的地址
# 其中val开头的是测试集
image_filenames, label_filenames = get_filename_list(image_dir)
val_image_filenames, val_label_filenames = get_filename_list(val_dir)
with tf.Graph().as_default():
# 在计算图中,设定几个占位符,这也是整个网络需要的输入
train_data_node = tf.placeholder( tf.float32, shape=[batch_size, image_h, image_w, image_c])
train_labels_node = tf.placeholder(tf.int64, shape=[batch_size, image_h, image_w, 1])
phase_train = tf.placeholder(tf.bool, name='phase_train')
global_step = tf.Variable(0, trainable=False)
# 获得一个batch的样本
images, labels = CamVidInputs(image_filenames, label_filenames, batch_size)
val_images, val_labels = CamVidInputs(val_image_filenames, val_label_filenames, batch_size)
# 构建loss与预测值计算节点,并将loss传入train函数构建训练节点train_op
loss, eval_prediction = inference(train_data_node, train_labels_node, batch_size, phase_train)
train_op = train(loss, global_step)
# 根据是否是finetune来加载预训练参数
saver = tf.train.Saver(tf.global_variables())
summary_op = tf.summary.merge_all()
with tf.Session() as sess:
if (is_finetune == True):
saver.restore(sess, finetune_ckpt )
else:
init = tf.global_variables_initializer()
sess.run(init)
# 这里还运用了多线程进行训练,设立了线程池
coord = tf.train.Coordinator()
threads = tf.train.start_queue_runners(sess=sess, coord=coord)
# Summery placeholders
summary_writer = tf.summary.FileWriter(train_dir, sess.graph)
average_pl = tf.placeholder(tf.float32)
acc_pl = tf.placeholder(tf.float32)
iu_pl = tf.placeholder(tf.float32)
average_summary = tf.summary.scalar("test_average_loss", average_pl)
acc_summary = tf.summary.scalar("test_accuracy", acc_pl)
iu_summary = tf.summary.scalar("Mean_IU", iu_pl)
# 在这里正式开始训练,可以看到,加载一个batch的样本然后传入,run训练节点train_op即为一次训练
for step in range(startstep, startstep + max_steps):
print(step)
image_batch ,label_batch = sess.run([images, labels])
feed_dict = {
train_data_node: image_batch,
train_labels_node: label_batch,
phase_train: True
}
start_time = time.time()
_, loss_value = sess.run([train_op, loss], feed_dict=feed_dict)
duration = time.time() - start_time
assert not np.isnan(loss_value), 'Model diverged with loss = NaN'
# 每10步打印一次loss以及在训练集上的准确度
if step % 10 == 0:
num_examples_per_step = batch_size
examples_per_sec = num_examples_per_step / duration
sec_per_batch = float(duration)
format_str = ('%s: step %d, loss = %.2f (%.1f examples/sec; %.3f '
'sec/batch)')
print (format_str % (datetime.now(), step, loss_value,
examples_per_sec, sec_per_batch))
# eval current training batch pre-class accuracy
pred = sess.run(eval_prediction, feed_dict=feed_dict)
per_class_acc(pred, label_batch)
# 每100步打印loss及在测试集上的准确度
if step % 100 == 0:
print("start validating.....")
total_val_loss = 0.0
hist = np.zeros((NUM_CLASSES, NUM_CLASSES))
for test_step in range(int(TEST_ITER)):
val_images_batch, val_labels_batch = sess.run([val_images, val_labels])
_val_loss, _val_pred = sess.run([loss, eval_prediction], feed_dict={
train_data_node: val_images_batch,
train_labels_node: val_labels_batch,
phase_train: True
})
total_val_loss += _val_loss
hist += get_hist(_val_pred, val_labels_batch)
print("val loss: ", total_val_loss / TEST_ITER)
acc_total = np.diag(hist).sum() / hist.sum()
iu = np.diag(hist) / (hist.sum(1) + hist.sum(0) - np.diag(hist))
test_summary_str = sess.run(average_summary, feed_dict={average_pl: total_val_loss / TEST_ITER})
acc_summary_str = sess.run(acc_summary, feed_dict={acc_pl: acc_total})
iu_summary_str = sess.run(iu_summary, feed_dict={iu_pl: np.nanmean(iu)})
print_hist_summery(hist)
print(" end validating.... ")
summary_str = sess.run(summary_op, feed_dict=feed_dict)
summary_writer.add_summary(summary_str, step)
summary_writer.add_summary(test_summary_str, step)
summary_writer.add_summary(acc_summary_str, step)
summary_writer.add_summary(iu_summary_str, step)
# Save the model checkpoint periodically.
# 每1000步存储一次参数
if step % 1000 == 0 or (step + 1) == max_steps:
checkpoint_path = os.path.join(train_dir, 'model.ckpt')
saver.save(sess, checkpoint_path, global_step=step)
coord.request_stop()
coord.join(threads)总体整个segnet还是很好玩的一个网络,生成的图片也很好看,但是不知道是不是这个代码的作者在写writeImage这个函数的时候是不是把顺序写错了,导致检测后的涂色和官网不一样,这里放一下该函数:
# 根据预测的类别代号,涂色,但是这里好像顺序错了,比如Car在这里是第10个,那么其代号就是9,但是官网的结果好像其代号不应该是9
def writeImage(image, filename):
""" store label data to colored image """
Sky = [128,128,128]
Building = [128,0,0]
Pole = [192,192,128]
Road_marking = [255,69,0]
Road = [128,64,128]
Pavement = [60,40,222]
Tree = [128,128,0]
SignSymbol = [192,128,128]
Fence = [64,64,128]
Car = [64,0,128]
Pedestrian = [64,64,0]
Bicyclist = [0,128,192]
Unlabelled = [0,0,0]
r = image.copy()
g = image.copy()
b = image.copy()
label_colours = np.array([Sky, Building, Pole, Road_marking, Road, Pavement, Tree, SignSymbol, Fence, Car, Pedestrian, Bicyclist, Unlabelled])
# 根据每个像素的类别,涂不同的颜色
for l in range(0,12):
r[image==l] = label_colours[l,0]
g[image==l] = label_colours[l,1]
b[image==l] = label_colours[l,2]
rgb = np.zeros((image.shape[0], image.shape[1], 3))
rgb[:,:,0] = r/1.0
rgb[:,:,1] = g/1.0
rgb[:,:,2] = b/1.0
im = Image.fromarray(np.uint8(rgb))
im.save(filename)下面是测试图像,我按实际情况改了改颜色,而且自己训练的参数效果还是有缺陷:
