ROS在rviz中实时显示轨迹(nav_msgs/Path消息的使用)
如何在rviz中如何实时显示轨迹呢?
本文分析nav_msgs/Path结构,实现在rviz中画出圆形轨迹
1.实现在rviz中画出圆形轨迹
1.1分析nav_msgs/Path.msg结构
nav_msgs/Path.msg总的结构
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/PoseStamped[] poses
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
以下为分解的结构:
std_msgs/Header header
geometry_msgs/PoseStamped[] poses
将以上结构展开如下:
std_msgs/Header结构
uint32 seq
time stamp
string frame_id
geometry_msgs/PoseStamped[]结构
std_msgs/Header header
geometry_msgs/Pose pose
geometry_msgs/Pose pose结构
# This represents an orientation in free space in quaternion form.
float64 x
float64 y
float64 z
float64 w
1.2实现画出圆形轨迹
(1)新建工程
mkdir -p catkin_ws/src
cd src
catkin_create_pkg showpath roscpp sensor_msgs std_msgs nav_msgs tf
cd ..
catkin_make
(2)编辑主函数showpath.cpp
#include (3)编辑CMakeLists.txt
在最后加入
add_executable(showpath src/showpath.cpp)
target_link_libraries(showpath ${catkin_LIBRARIES})
(4)编译和运行
编译
cd ~/catkin_ws/
catkin_make
运行
source ./devel/setup.bash
rosrun showpath showpath
查看/trajectory 信息
rostopic echo /trajector
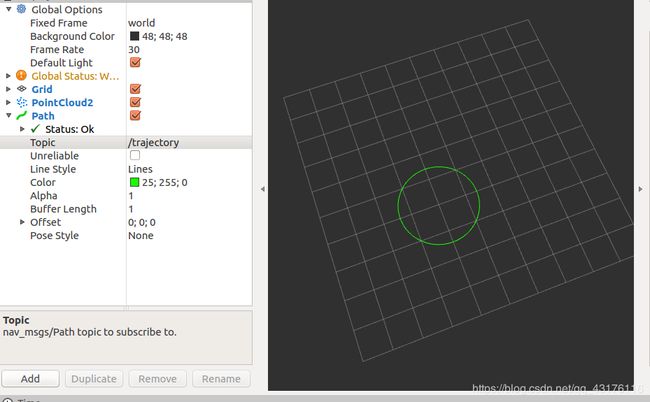
2.rviz实验结果
运行
rosrun rviz rviz
在globel option的Fixed Fram输入odom
左边点击add
选中path
在path的topic选项中选
/trajectory
 改下代码(将X方向的初始速度分量设为0):
改下代码(将X方向的初始速度分量设为0):
double x = 0.0;
double y = 0.0; //初始的xy起点
double th = 0.0; //初始的角度
double vx = 0; //初始的x轴向速度
double vy = 0.1; //初始的y轴向速度
double vth = 0.1;//初始的角速度
