实例分割论文:PolarMask: Single Shot Instance Segmentation with Polar Representation及其Pytorch实现
PolarMask: Single Shot Instance Segmentation with Polar Representation
PDF: https://arxiv.org/pdf/1909.13226.pdf
PyTorch: https://github.com/xieenze/PolarMask
PyTorch: https://github.com/shanglianlm0525/PyTorch-Networks

创新点:
1 把二阶段的’‘先检测再分割’'实例分割检测框架(如MaskRCNN), 转换为一阶段框架,同时与目标检测相比计算量没有明显增加.
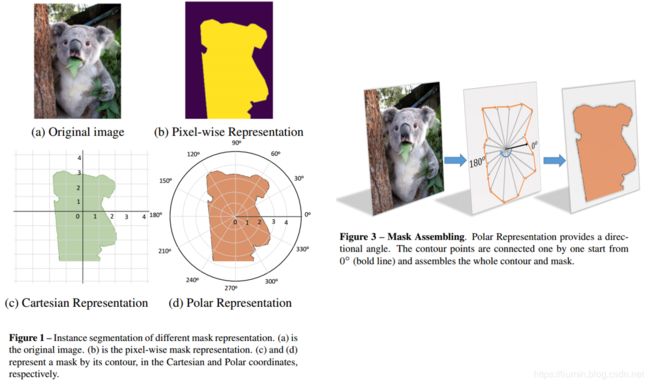
2 提出基于极坐标系建模轮廓的实例分割方式,将目标检测的4根射线散发到36根射线.
- 与像素级建模相比,极坐标系建模轮廓使问题简单化,且计算量更小;
- 与直角坐标系建模轮廓相比,极坐标系建模轮廓可以利用固定角度先验信息,进一步简化问题;
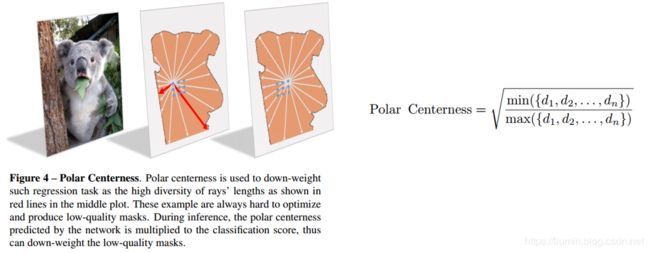
3 提出了一种新的Polar Centerness用来选取高质量的正样本
4 提出了Polar IoU Loss近似计算出predict mask和gt mask的iou,通过Iou Loss 更好的优化mask的回归,实验表明Polar IoU Loss比Smooth L1loss更高效.

PyTorch代码:
import torch
import torch.nn as nn
import torchvision
def Conv3x3ReLU(in_channels,out_channels):
return nn.Sequential(
nn.Conv2d(in_channels=in_channels,out_channels=out_channels,kernel_size=3,stride=1,padding=1),
nn.ReLU6(inplace=True)
)
def locLayer(in_channels,out_channels):
return nn.Sequential(
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=3, stride=1, padding=1),
)
def conf_centernessLayer(in_channels,out_channels):
return nn.Sequential(
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
Conv3x3ReLU(in_channels=in_channels, out_channels=in_channels),
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=3, stride=1, padding=1),
)
class PolarMask(nn.Module):
def __init__(self, num_classes=21):
super(PolarMask, self).__init__()
self.num_classes = num_classes
resnet = torchvision.models.resnet50()
layers = list(resnet.children())
self.layer1 = nn.Sequential(*layers[:5])
self.layer2 = nn.Sequential(*layers[5])
self.layer3 = nn.Sequential(*layers[6])
self.layer4 = nn.Sequential(*layers[7])
self.lateral5 = nn.Conv2d(in_channels=2048, out_channels=256, kernel_size=1)
self.lateral4 = nn.Conv2d(in_channels=1024, out_channels=256, kernel_size=1)
self.lateral3 = nn.Conv2d(in_channels=512, out_channels=256, kernel_size=1)
self.upsample4 = nn.ConvTranspose2d(in_channels=256, out_channels=256, kernel_size=4, stride=2, padding=1)
self.upsample3 = nn.ConvTranspose2d(in_channels=256, out_channels=256, kernel_size=4, stride=2, padding=1)
self.downsample6 = nn.Conv2d(in_channels=256, out_channels=256, kernel_size=3, stride=2, padding=1)
self.downsample5 = nn.Conv2d(in_channels=256, out_channels=256, kernel_size=3, stride=2, padding=1)
self.loc_layer3 = locLayer(in_channels=256,out_channels=36)
self.conf_centerness_layer3 = conf_centernessLayer(in_channels=256,out_channels=self.num_classes)
self.loc_layer4 = locLayer(in_channels=256, out_channels=36)
self.conf_centerness_layer4 = conf_centernessLayer(in_channels=256, out_channels=self.num_classes)
self.loc_layer5 = locLayer(in_channels=256, out_channels=36)
self.conf_centerness_layer5 = conf_centernessLayer(in_channels=256, out_channels=self.num_classes)
self.loc_layer6 = locLayer(in_channels=256, out_channels=36)
self.conf_centerness_layer6 = conf_centernessLayer(in_channels=256, out_channels=self.num_classes)
self.loc_layer7 = locLayer(in_channels=256, out_channels=36)
self.conf_centerness_layer7 = conf_centernessLayer(in_channels=256, out_channels=self.num_classes)
self.init_params()
def init_params(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
x = self.layer1(x)
c3 =x = self.layer2(x)
c4 =x = self.layer3(x)
c5 = x = self.layer4(x)
p5 = self.lateral5(c5)
p4 = self.upsample4(p5) + self.lateral4(c4)
p3 = self.upsample3(p4) + self.lateral3(c3)
p6 = self.downsample5(p5)
p7 = self.downsample6(p6)
loc3 = self.loc_layer3(p3)
conf_centerness3 = self.conf_centerness_layer3(p3)
conf3, centerness3 = conf_centerness3.split([self.num_classes, 1], dim=1)
loc4 = self.loc_layer4(p4)
conf_centerness4 = self.conf_centerness_layer4(p4)
conf4, centerness4 = conf_centerness4.split([self.num_classes, 1], dim=1)
loc5 = self.loc_layer5(p5)
conf_centerness5 = self.conf_centerness_layer5(p5)
conf5, centerness5 = conf_centerness5.split([self.num_classes, 1], dim=1)
loc6 = self.loc_layer6(p6)
conf_centerness6 = self.conf_centerness_layer6(p6)
conf6, centerness6 = conf_centerness6.split([self.num_classes, 1], dim=1)
loc7 = self.loc_layer7(p7)
conf_centerness7 = self.conf_centerness_layer7(p7)
conf7, centerness7 = conf_centerness7.split([self.num_classes, 1], dim=1)
locs = torch.cat([loc3.permute(0, 2, 3, 1).contiguous().view(loc3.size(0), -1),
loc4.permute(0, 2, 3, 1).contiguous().view(loc4.size(0), -1),
loc5.permute(0, 2, 3, 1).contiguous().view(loc5.size(0), -1),
loc6.permute(0, 2, 3, 1).contiguous().view(loc6.size(0), -1),
loc7.permute(0, 2, 3, 1).contiguous().view(loc7.size(0), -1)],dim=1)
confs = torch.cat([conf3.permute(0, 2, 3, 1).contiguous().view(conf3.size(0), -1),
conf4.permute(0, 2, 3, 1).contiguous().view(conf4.size(0), -1),
conf5.permute(0, 2, 3, 1).contiguous().view(conf5.size(0), -1),
conf6.permute(0, 2, 3, 1).contiguous().view(conf6.size(0), -1),
conf7.permute(0, 2, 3, 1).contiguous().view(conf7.size(0), -1),], dim=1)
centernesses = torch.cat([centerness3.permute(0, 2, 3, 1).contiguous().view(centerness3.size(0), -1),
centerness4.permute(0, 2, 3, 1).contiguous().view(centerness4.size(0), -1),
centerness5.permute(0, 2, 3, 1).contiguous().view(centerness5.size(0), -1),
centerness6.permute(0, 2, 3, 1).contiguous().view(centerness6.size(0), -1),
centerness7.permute(0, 2, 3, 1).contiguous().view(centerness7.size(0), -1), ], dim=1)
out = (locs, confs, centernesses)
return out
if __name__ == '__main__':
model = PolarMask()
print(model)
input = torch.randn(1, 3, 800, 1024)
out = model(input)
print(out[0].shape)
print(out[1].shape)
print(out[2].shape)