Patch Match Stereo文献+代码
Patch Match Stereo文献+代码
- 1. Patch Match
- 1.1 初始化
- 1.2 传播
- 1.3 搜索
- 2. Patch Match Stereo
- 2.1 pipeline
- 2.2 Initialization
- 2.2.1 初始化weight
- 2.2.2 计算灰度的导数gradient
- 2.2.3 平面初始化
- 2.2.4 评估cost
- 2.3 Process
- 2.3.1 spatial propagation
- 2.3.2 plane refinement
- 2.3.3 view propagation
- 2.4 post process
- 2.5 temporal propagation
- 2.6 实验
原文来自:PatchMatch Stereo - Stereo Matching with Slanted Support Windows
代码来自:github
1. Patch Match
patch match主要有下面三个步骤。在这里只简单描述一下他们的大概步骤。以备下面在patch match stereo中对比理解。
1.1 初始化
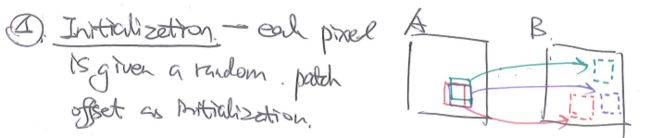
对每一个像素点随机初始化一个reference中的对应的patch。
1.2 传播

这里考虑到的因素是:相邻像素点对应的patch也应该是临近的。并以此来优化像素点的对应patch的位置。
1.3 搜索

最后再进行细致的搜索。
2. Patch Match Stereo
patch match可以解决很多问题,比如图像的补全拉升等等。而这里我们研究patch match stereo,主要解决的是双目估计深度的问题。

它本质是对图片中的每一个像素点(p)都在reference帧中寻找一个对应的平面(f),以最小化cost函数(下图中的m)。

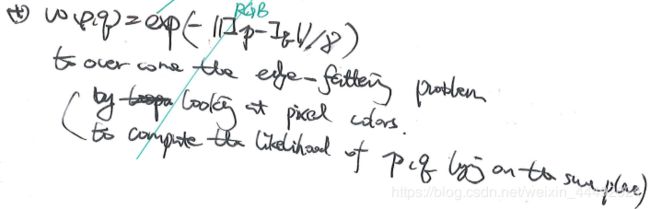
上面展示的是点p和对应的平面f的cost funciton。具体说明见原文。rho和w的定义见下面的说明。
w是平面中每一个点对应的weight。rho对应的像素点之间的相似性计算。
由点的x和y坐标(图像中的col和row)可以计算它落在平面上的话对应的disparity(disparity实际是左右两图的delta x,实际上像素点深度值越大,delta x越大,所以disparity也可以反应出深度,所以下面的方程实际计算z的值)。

2.1 pipeline
结合代码,整个patch match stereo有三个部分:初始化(set),主线处理(process),和后处理优化(postProcess)。
void PatchMatch::operator()(const cv::Mat3b &img1, const cv::Mat3b &img2, int iterations, bool reverse)
{
this->set(img1, img2);
this->process(iterations, reverse);
this->postProcess();
}
2.2 Initialization
2.2.1 初始化weight
每一个像素点(rows * cols个像素点)对应的一个patch的每一个元素(WINDOW_SIZE * WINDOW_SIZE 个元素)都有一个weight。所以weight的size为{rows, cols, WINDOW_SIZE, WINDOW_SIZE}。
// pixels neighbours weights
std::cerr<<"Precomputing pixels weight...\n";
int wmat_sizes[] = {rows, cols, WINDOW_SIZE, WINDOW_SIZE};
this->weigs[0] = cv::Mat(4, wmat_sizes, CV_32F);
this->weigs[1] = cv::Mat(4, wmat_sizes, CV_32F);
precompute_pixels_weights(img1, this->weigs[0], WINDOW_SIZE);
precompute_pixels_weights(img2, this->weigs[1], WINDOW_SIZE);
在precompute_pixels_weights中,每一个weight由下面的函数计算。
weights.at(cv::Vec {cy, cx, y -cy +half, x -cx +half})
= weight(frame(cy, cx), frame(y, x), this->gamma);
上面代码中的weight函数如下定义(由参数gamma限制的像素颜色差的指数,正如原文):
inline float weight(const cv::Vec3f &p, const cv::Vec3f &q, float gamma=10.0f)
{
return std::exp(-cv::norm(p-q, cv::NORM_L1) / gamma);
}
但是其中颜色的差距不应该直接由RGBchannel的差距来看,因为他们反应的并不是视觉上的色差,我认为最好可以使用色差LAB来计量更好。
2.2.2 计算灰度的导数gradient
// greyscale images gradient
std::cerr<<"Evaluating images gradient...\n";
this->grads[0] = cv::Mat2f(rows, cols);
this->grads[1] = cv::Mat2f(rows, cols);
compute_greyscale_gradient(img1, this->grads[0]);
compute_greyscale_gradient(img2, this->grads[1]);
在这个github的实现中,作者使用opencv提供的sobel方法来提取灰度的差分。
cv::cvtColor(frame, gray, cv::COLOR_BGR2GRAY);
cv::Sobel(gray, x_grad, CV_32F, 1, 0, 3, scale, delta, cv::BORDER_DEFAULT);
cv::Sobel(gray, y_grad, CV_32F, 0, 1, 3, scale, delta, cv::BORDER_DEFAULT);
x_grad = x_grad / 8.f;
y_grad = y_grad / 8.f;
2.2.3 平面初始化
// pixels' planes random inizialization
std::cerr<<"Precomputing random planes...\n";
this->planes[0] = Matrix2D(rows, cols);
this->planes[1] = Matrix2D(rows, cols);
this->initialize_random_planes(this->planes[0], MAX_DISPARITY);
this->initialize_random_planes(this->planes[1], MAX_DISPARITY);
论文描述的初始化方式是:

先随机选取一个disparity z的值,随机选取normal的方向。然后使用一个点和和一个方向初始化这个平面。通过如下的代码部分实现。
float z = random_generator.uniform(.0f, max_d); // random disparity
cv::Vec3f point(x, y, z);
float nx = ((float)std::rand() - RAND_HALF) / RAND_HALF;
float ny = ((float)std::rand() - RAND_HALF) / RAND_HALF;
float nz = ((float)std::rand() - RAND_HALF) / RAND_HALF;
cv::Vec3f normal(nx,ny,nz);
cv::normalize(normal, normal);
planes(y, x) = Plane(point, normal);
从点和normal初始化Plane的实现如下:
Plane::Plane(cv::Vec3f point, cv::Vec3f normal) : point(point), normal(normal)
{
float a = -normal[0] / normal[2];
float b = -normal[1] / normal[2];
float c = cv::sum(normal.mul(point))[0] / normal[2];
coeff = cv::Vec3f(a, b, c);
}
2.2.4 评估cost
// initial planes costs evaluation
std::cerr<<"Evaluating initial planes cost...\n";
this->costs[0] = cv::Mat1f(rows, cols);
this->costs[1] = cv::Mat1f(rows, cols);
this->evaluate_planes_cost(0);
this->evaluate_planes_cost(1);
// left and right disparity maps
this->disps[0] = cv::Mat1f(rows, cols);
this->disps[1] = cv::Mat1f(rows, cols);
evaluate_planes_cost中对每个像素点进行如下计算
costs[cpv](y, x) = plane_match_cost(planes[cpv](y,x), x, y, WINDOW_SIZE, cpv);
plane_match_cost则是按照文章的说明进行下面的计算(即:w*rho)
cost += w * dissimilarity(f1(y, x), mcolo, g1(y, x), mgrad);
其中dissimilarity(rho)在原文中有如下表达式:

代码中的实现如下:
float PatchMatch::dissimilarity(const cv::Vec3f &pp, const cv::Vec3f &qq, const cv::Vec2f &pg, const cv::Vec2f &qg)
{
float cost_c = cv::norm(pp - qq, cv::NORM_L1);
float cost_g = cv::norm(pg - qg, cv::NORM_L1);
cost_c = std::min(cost_c, this->tau_c);
cost_g = std::min(cost_g, this->tau_g);
return (1 - this->alpha) * cost_c + this->alpha * cost_g;
}
2.3 Process
在这个函数中对每个像素点调用了process_pixel函数。
void PatchMatch::process_pixel(int x, int y, int cpv, int iter)
{
// spatial propagation
spatial_propagation(x, y, cpv, iter);
// plane refinement
plane_refinement(x, y, cpv, MAX_DISPARITY/2, 1.0f, 0.1f);
// view propagation
view_propagation(x, y, cpv);
}
2.3.1 spatial propagation
这里的原则是临近点会有相似的对应平面(这对应了第一章patch match的第二部分 propagation)。

// 对offset范围内的点进行循环, 每一个offset对应了一个平面
for(auto it = offsets.begin(); it < offsets.end(); ++it)
{
std::pair ofs = *it;
// 得到offset对应的nx ny
int ny = y + ofs.first;
int nx = x + ofs.second;
if(!inside(nx, ny, 0, 0, cols, rows))
continue;
// 得到offset对应的nx ny所对应的平面
Plane p_neigb = planes[cpv](ny, nx);
// 计算当前点和这个新平面的cost
float new_cost = plane_match_cost(p_neigb, x, y, WINDOW_SIZE, cpv);
// 比较新旧两个cost,判断是否要更新当前点对应的平面
if(new_cost < old_cost)
{
old_plane = p_neigb;
old_cost = new_cost;
}
}
2.3.2 plane refinement
这里针对每一个像素点对应的平面,再进一步优化这个平面的参数,以进一步优化cost。这里其实是一个进一步优化的过程。
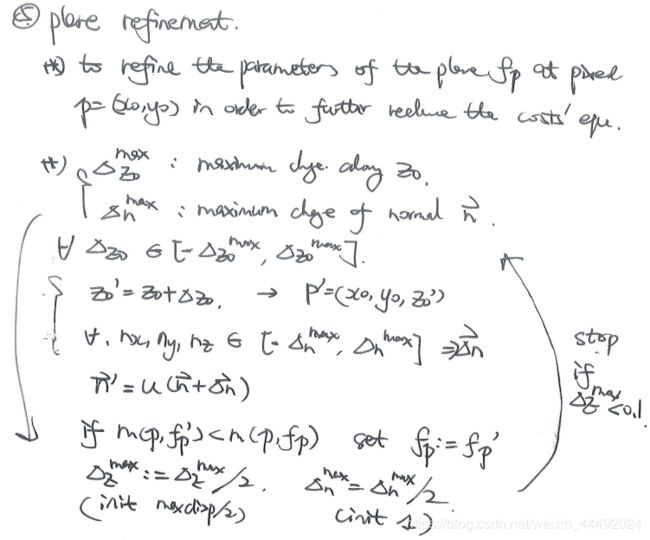
// 停止条件是 delta z max小于阈值
while(max_dz >= end_dz)
{
// Searching a random plane starting from the actual one
std::random_device rd;
std::mt19937 gen(rd());
// 分别计算随机的delta z和delta n
std::uniform_real_distribution<> rand_z(-max_dz, +max_dz);
std::uniform_real_distribution<> rand_n(-max_dn, +max_dn);
// 根据delta z计算新的平面点
float z = old_plane[0] * x + old_plane[1] * y + old_plane[2];
float delta_z = rand_z(gen);
cv::Vec3f new_point(x, y, z + delta_z);
// 根据delta n计算新的平面normal
cv::Vec3f n = old_plane.getNormal();
cv::Vec3f delta_n(rand_n(gen), rand_n(gen), rand_n(gen));
cv::Vec3f new_normal = n + delta_n;
cv::normalize(new_normal, new_normal);
// test the new plane
// 评估这个新平面的cost
Plane new_plane(new_point, new_normal);
float new_cost = plane_match_cost(new_plane, x, y, WINDOW_SIZE, cpv);
// 判断是否要更新对应平面
if(new_cost < old_cost)
{
old_plane = new_plane;
old_cost = new_cost;
}
// 缩小delta z max和delta n max的范围
max_dz /= 2.0f;
max_dn /= 2.0f;
}
2.3.3 view propagation
这里考虑的是左右两图(stereo两图)相同位置的点对应的面应该不会有太大偏差(因为双目的距离不会太远)。

// current plane 当前对应平面
Plane view_plane = planes[cpv](y, x);
// computing matching point in other view
// reparameterized corresopndent plane in other view
// 得到在对应reference帧中的对应点位置 并且找到对应的平面
int mx, my;
Plane new_plane = view_plane.viewTransform(x, y, sign, mx, my);
if(!inside(mx, my, 0, 0, views[0].cols, views[0].rows))
return;
// check if this reparameterized plane is better in the other view
// 评估当前点和reference中对应点的对应平面的cost
float& old_cost = costs[1-cpv](my, mx);
float new_cost = plane_match_cost(new_plane, mx, my, WINDOW_SIZE, 1-cpv);
// 判断是否需要更新
if(new_cost < old_cost)
{
planes[1-cpv](my, mx) = new_plane;
old_cost = new_cost;
}
2.4 post process

void PatchMatch::postProcess()
{
std::cerr<<"Executing post-processing...\n";
// checking pixels-plane disparity validity
cv::Mat1b lft_validity(rows, cols, (unsigned char)false);
cv::Mat1b rgt_validity(rows, cols, (unsigned char)false);
// cv::Mat1b ld(rows, cols);
// cv::Mat1b rd(rows, cols);
for(int y=0; y < rows; ++y)
{
for(int x=0; x < cols; ++x)
{
int x_rgt_match = std::max(0.f, std::min((float)cols, x - disps[0](y, x)));
lft_validity(y, x) = (std::abs(disps[0](y, x) - disps[1](y, x_rgt_match)) <= 1);
int x_lft_match = std::max(0.f, std::min((float)rows, x + disps[1](y, x)));
rgt_validity(y, x) = (std::abs(disps[1](y, x) - disps[0](y, x_lft_match)) <= 1);
}
}
// cv::imwrite("l_inv.png", 255*lft_validity);
// cv::imwrite("r_inv.png", 255*rgt_validity);
// fill-in holes related to invalid pixels
#pragma omp parallel for
for(int y=0; y < rows; y++)
{
for (int x=0; x < cols; x++)
{
if (!lft_validity(y, x))
fill_invalid_pixels(y, x, planes[0], lft_validity);
if (!rgt_validity(y, x))
fill_invalid_pixels(y, x, planes[1], rgt_validity);
}
}
this->planes_to_disparity(this->planes[0], this->disps[0]);
this->planes_to_disparity(this->planes[1], this->disps[1]);
// cv::normalize(disps[0], ld, 0, 255, cv::NORM_MINMAX);
// cv::normalize(disps[1], rd, 0, 255, cv::NORM_MINMAX);
// cv::imwrite("ld2.png", ld);
// cv::imwrite("rd2.png", rd);
// applying weighted median filter to left and right view respectively
for(int x=0; x2.5 temporal propagation
原文还提供了针对连续帧的处理方法:连续两帧相同位置的点对应的平面应该是类似的(连续帧的运动不会太剧烈,类似stereo两帧的特性)。

2.6 实验
这里给大家一个反例,首先两张图的实际disparity太大了,已经超出了设置的window size,而且两图的运动并不是完全的x方向上的平移,实际disparity有y轴分量。这两方面共同作用,所以导致算法失效了。