蓝桥杯第七届国赛试题--“电压、频率采集设备”
题目要求
设计任务及要求
1. 频率信号测量
使用竞赛板 NE555 方波信号发生器产生用于频率测量功能测试的方波信号,信号频率范围为 500Hz ~ 20KHz,电位器 RB3 调节信号频率, 可使用“跳线帽” 将单片机P34 引脚与方波信号发生器输出引脚 NET_SIG 短接。
2. 电压信号测量
使用竞赛板上 RB2 电位器输出测试电压信号,信号输出范围为 0V-5V。
3. 实时时钟功能
读取 DS1302 实时时钟芯片,并通过数码管显示时间数据, 设备上电后初始时间配置为 23 时 59 分 55 秒。
4. 记录与输出功能
根据给定硬件的性能参数,设计合理的采样周期, 当电压低于电压下限 VL 或高于电压上限 VH时, 将事件类型和发生时间保存到 E2PROM 中。 设备中只需保存最近一次发生的电压波动情况, 数据存储格式可自行定义。
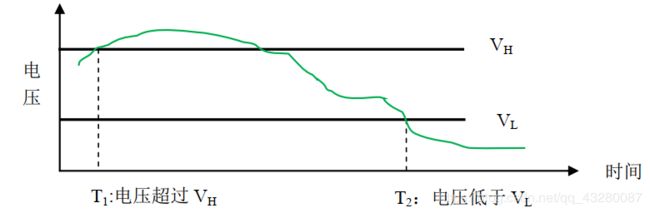
上图例, 电压连续变化过程中, 在 T1和 T2时刻会触发事件记录功能。
5. 显示与按键控制
5.1 4x4 矩阵键盘按键功能定义如图 2 所示:
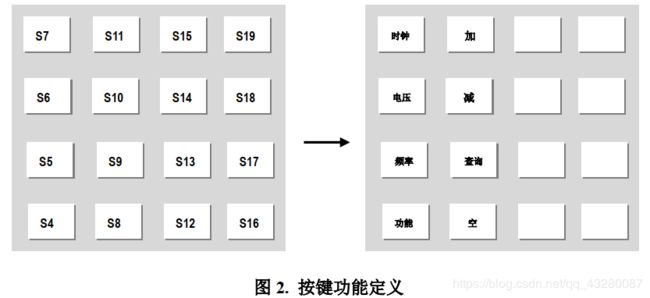
5.2 按键 S7 定义为“时钟”按键,按下后, 数码管显示当前时钟信息, 显示界面如图 3 所示:
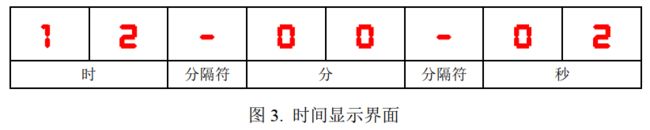
在时钟显示界面下, S4 功能按键为时钟调整按键, 按下 S4,循环切换选择时、分、秒, 对应的显示单元 1 秒间隔亮灭, 通过“加、减” 按键调整当前选择的时间单位,再次按下按键 S7 返回到时钟显示界面,完成时钟配置功能。

时钟调整状态下,“加、减”按键可令当前选择调整的时间增加或减少 1 个单位。
5.3 按键 S6 定义为“电压测量”按键,按下后,启动电压测量功能,数码管显示格式如图 4 所示:
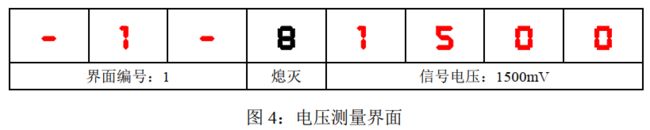
电压测量界面下, S4 功能按键为电压阈值调整按键,按下 S4,循环选择电压上限、下限,对应的显示单元 1 秒间隔亮灭,通过“加、减” 按键调整电压阈值, 再次按下按键 S6 返回到电压测量界面,完成电压阈值配置功能并将新的参数写入E2RPOM。

电压阈值调整状态下,“加、减”按键可令当前选择调整的阈值增加或减少 500mV。
5.4 按键 S5 定义为“频率测量”按键,按下后,启动频率测量功能,设备采集输入 P34 引脚的信号频率,数码管切换到“频率测量”显示界面,“频率测量”功能下,按键 S4 定义为“周期/频率”按键,可以进行频率和周期数据的切换显示,显示界面如图 6、 7 所示:


5.5 按键 S9 定义为“查询按键”,按下后,显示最近一次电压波动发生的时间和波动类型, 显示格式如图 8、 9 所示:

在事件查询界面下,功能按键 S4 可切换显示事件时间和事件类型,“00”表示低于下限事件,“01”表示超出上限事件。

6. 说明
6.1 最近一次电压波动发生时间和类型、电压上限 VH、电压下限 VL 保存在
E2PROM 中,设备重新上电后,能够从存储器中获取参数和数据。
6.2 建立一个准考证号命名的 txt 文档, 写出作品设定的单片机内部振荡器频率,保存在考生文件夹中。
程序代码
主函数
#include "stc15f2k60s2.h"
#include "key.h"
#include "display.h"
#include "ds1302.h"
#include "iic.h"
extern uchar set_time_display[8];
extern unsigned char code smg_tab[10];
extern uchar shi,fen,miao; //设置时间界面下,时分秒
extern uchar ask_shi,ask_fen,ask_miao; //查询界面下,事件发生时,时分秒
extern uchar kinds_of_things; //事件类型
extern uint ad_value; // A/D值
extern uchar mode_display; //显示模式
uchar key_value; //按键值
uchar S4_count_time; //时钟设置界面下S4按键次数计数
uchar S4_count_ad; //电压界面下S4按键次数计数
uchar S4_count_fre; //频率界面下S4按键次数计数
uchar S4_count_ack; //查询界面下S4按键次数计数
uchar test_eeprom; //测试eeprom标志,确保程序第一次下载时,是预设初始值
uchar hour,minute,second; //时分秒
uchar VH_temp,VL_temp;
uint VH_limit=2000,VL_limit=1000; //电压上、下限值
uint over_count1,over_count2; //超过电压极限值计数
bit set_time_flag; //设置时间标志
bit set_ad_flag; //设置A/D标志
bit set_fre_flag; //设置频率标志
bit blink_flag; //数码管闪烁标志
bit low_flag,high_flag; //低于电压下限、上限标志
void S4_set(); //S4功能按键函数
void smg_blink(); //数码管闪烁函数
void add_set(); //“加” 函数
void sub_set(); //“减”函数
void eeprom_init(); //eeprom初始化函数
void voltage_ask(); //S9按键查询函数
void All_init()
{
P2=(P2&0X1F)|0XA0;
P0=0X00;
P2=P2&0X1F;
P2=(P2&0X1F)|0X80;
P0=0XFF;
P2=P2&0X1F;
}
void main()
{
All_init();
Timer0Init();
Timer1Init();
ds1302_init();
eeprom_init();
while(1)
{
time_display_init(); //时间显示函数
AD_dispaly_init(); //电压显示函数
fre_display_init(); //频率显示函数
smg_blink(); //数码管闪烁显示函数
set_ad_init(); //设置电压上下限显示函数
period_display_init(); //周期显示函数
voltage_ask(); //电压上下限处理函数
ask_display_init(); //S9按键查询显示函数
key_value=key_init();
switch(key_value)
{
case 7:
mode_display=0; //时钟显示
if(set_time_flag)
{
set_time_flag=0;
hour=(shi/10*16)+shi%10;
minute=(fen/10*16)+fen%10;
second=(miao/10*16)+miao%10;
Ds1302_Single_Byte_Write(ds1302_control_addr,0x00);
Ds1302_Single_Byte_Write(ds1302_sec_addr,second);
Ds1302_Single_Byte_Write(ds1302_min_addr,minute);
Ds1302_Single_Byte_Write(ds1302_hr_addr,hour);
Ds1302_Single_Byte_Write(ds1302_control_addr,0x80);
}
break;
case 6:
mode_display=1; //电压显示
if(set_ad_flag)
{
set_ad_flag=0;
VH_temp=VH_limit/100;
VL_temp=VL_limit/100;
Write_eeprom(0x01,VH_temp);
Delay10ms();
Write_eeprom(0x02,VL_temp);
Delay10ms();
Write_eeprom(0x00,100); //程序下载后,将选择的固定位设置为想要的数值
Delay10ms();
}
break;
case 5:
mode_display=2; //频率显示
if(set_fre_flag)
{
set_fre_flag=0;
}
break;
case 4:
if(mode_display==0)
{
set_time_flag=1;
}
if(mode_display==1)
{
set_ad_flag=1;
}
if(mode_display==2)
{
set_fre_flag=1;
}
S4_set();
break;
case 11:
add_set();
break;
case 10:
sub_set();
break;
case 9:
mode_display=6;
break;
}
}
}
void eeprom_init()
{
test_eeprom=Read_eeprom(0x00); //读取选择的固定位,看是不是想要的数值
if(test_eeprom==100) //是,正常读取电压上下限
{
VH_limit=Read_eeprom(0x01)*100;
Delay10ms();
VL_limit=Read_eeprom(0x02)*100;
Delay10ms();
}
else //不是,将电压上下限设置为初始值
{
VH_limit=2000;
VL_limit=1000;
}
kinds_of_things=Read_eeprom(0x10);
Delay10ms();
ask_shi=Read_eeprom(0x11);
Delay10ms();
ask_fen=Read_eeprom(0x12);
Delay10ms();
ask_miao=Read_eeprom(0x13);
Delay10ms();
}
void voltage_ask()
{
if(ad_value<=VL_limit) //低于电压下限
{
kinds_of_things=0;
over_count1++;
if(over_count1<10) //如果电压一直低于下限,确保记录的时间是事件发生时刻的时间
low_flag=1;
}
else
over_count1=0;
if(low_flag)
{
low_flag=0;
ask_shi=(hour/16)*10+hour%16;
ask_fen=(minute/16)*10+minute%16;
ask_miao=(second/16)*10+second%16;
}
if(ad_value>=VH_limit)
{
kinds_of_things=1;
over_count2++;
if(over_count2<10)
high_flag=1;
}
else
over_count2=0;
if(high_flag)
{
high_flag=0;
ask_shi=(hour/16)*10+hour%16;
ask_fen=(minute/16)*10+minute%16;
ask_miao=(second/16)*10+second%16;
}
Write_eeprom(0x10,kinds_of_things);
Delay10ms();
Write_eeprom(0x11,ask_shi);
Delay10ms();
Write_eeprom(0x12,ask_fen);
Delay10ms();
Write_eeprom(0x13,ask_miao);
Delay10ms();
}
void S4_set()
{
if(mode_display==0)
{
mode_display=3; //设置时间界面
}
if(mode_display==3)
{
S4_count_time++;
if(S4_count_time==4)
S4_count_time=1;
}
if(S4_count_time==1)
{
shi=(hour/16)*10+hour%16;
fen=(minute/16)*10+minute%16;
miao=(second/16)*10+second%16;
}
if(mode_display==1)
{
mode_display=4; //设置电压上下限界面
}
if(mode_display==4)
{
S4_count_ad++;
if(S4_count_ad==3)
S4_count_ad=1;
}
if(mode_display==2)
{
mode_display=5; //周期显示界面
}
if(mode_display==5)
{
S4_count_fre++;
if(S4_count_fre==3)
S4_count_fre=1;
if(S4_count_fre==2)
mode_display=2;
}
if(mode_display==6)
{
mode_display=7; //查询事件发生时间界面
}
if(mode_display==7)
{
S4_count_ack++;
if(S4_count_ack==3)
S4_count_ack=1;
if(S4_count_ack==2)
mode_display=6;
}
}
void add_set()
{
if(mode_display==3)
{
if(S4_count_time==1)
{
shi++;
if(shi==24)
shi=0;
}
if(S4_count_time==2)
{
fen++;
if(fen==60)
fen=0;
}
if(S4_count_time==3)
{
miao++;
if(miao==60)
miao=0;
}
}
if(mode_display==4)
{
if(S4_count_ad==1)
VH_limit+=500;
if(S4_count_ad==2)
VL_limit+=500;
}
}
void sub_set()
{
if(mode_display==3)
{
if(S4_count_time==1)
{
if(shi>0)
shi--;
}
if(S4_count_time==2)
{
if(fen>0)
fen--;
}
if(S4_count_time==3)
{
if(miao>0)
miao--;
}
}
if(mode_display==4)
{
if(S4_count_ad==1)
VH_limit-=500;
if(S4_count_ad==2)
VL_limit-=500;
}
}
void smg_blink()
{
if(mode_display==3)
{
set_time_display[2]=0x40;
set_time_display[5]=0x40;
if(blink_flag)
{
if(S4_count_time==1)
{
set_time_display[0]=smg_tab[shi/10];
set_time_display[1]=smg_tab[shi%10];
}
if(S4_count_time==2)
{
set_time_display[3]=smg_tab[fen/10];
set_time_display[4]=smg_tab[fen%10];
}
if(S4_count_time==3)
{
set_time_display[6]=smg_tab[miao/10];
set_time_display[7]=smg_tab[miao%10];
}
}
else
{
if(S4_count_time==1)
{
set_time_display[0]=0x00;
set_time_display[1]=0x00;
}
else
{
set_time_display[0]=smg_tab[shi/10];
set_time_display[1]=smg_tab[shi%10];
}
if(S4_count_time==2)
{
set_time_display[3]=0x00;
set_time_display[4]=0x00;
}
else
{
set_time_display[3]=smg_tab[fen/10];
set_time_display[4]=smg_tab[fen%10];
}
if(S4_count_time==3)
{
set_time_display[6]=0x00;
set_time_display[7]=0x00;
}
else
{
set_time_display[6]=smg_tab[miao/10];
set_time_display[7]=smg_tab[miao%10];
}
}
}
}
显示模块
#include "display.h"
#include "ds1302.h"
#include "iic.h"
unsigned char code smg_tab[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned char smg_wei[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
uchar time_display[8];
uchar AD_display[8];
uchar fre_display[8];
uchar set_time_display[8];
uchar set_ad_display[8];
uchar period_display[8];
uchar ask_display[8];
uchar ask_time_display[8];
extern uchar hour,minute,second; //时分秒
extern uint VH_limit,VL_limit;
uchar shi,fen,miao;
uchar ask_shi,ask_fen,ask_miao;
uchar kinds_of_things;
uint ad_value; //A/D值
uint frequence; //频率
uint period; //周期
uchar mode_display; //显示模式
bit flag500ms;
extern bit blink_flag;
void time_display_init()
{
hour=Ds1302_Single_Byte_Read(ds1302_hr_addr);
minute=Ds1302_Single_Byte_Read(ds1302_min_addr);
second=Ds1302_Single_Byte_Read(ds1302_sec_addr);
time_display[0]=smg_tab[hour/16];
time_display[1]=smg_tab[hour%16];
time_display[2]=0x40;
time_display[3]=smg_tab[minute/16];
time_display[4]=smg_tab[minute%16];
time_display[5]=0x40;
time_display[6]=smg_tab[second/16];
time_display[7]=smg_tab[second%16];
}
void AD_dispaly_init()
{
ad_value=(read_pcf8591(0x03)*19.61f);
Delay10ms();
AD_display[0]=0x40;
AD_display[1]=smg_tab[1];
AD_display[2]=0x40;
AD_display[3]=0x00;
AD_display[4]=smg_tab[ad_value/1000];
AD_display[5]=smg_tab[ad_value/100%10];
AD_display[6]=smg_tab[ad_value/10%10];
AD_display[7]=smg_tab[ad_value%10];
}
void set_ad_init()
{
set_ad_display[0]=smg_tab[VH_limit/1000];
set_ad_display[1]=smg_tab[VH_limit/100%10];
set_ad_display[2]=smg_tab[VH_limit/10%10];
set_ad_display[3]=smg_tab[VH_limit%10];
set_ad_display[4]=smg_tab[VL_limit/1000];
set_ad_display[5]=smg_tab[VL_limit/100%10];
set_ad_display[6]=smg_tab[VL_limit/10%10];
set_ad_display[7]=smg_tab[VL_limit%10];
}
void frequence_get()
{
if(flag500ms)
{
flag500ms=0;
TR0=0; //关闭定时器0计数
frequence=TH0*256+TL0; //统计500ms内脉冲数
frequence=frequence*2; //乘以2就是1s内脉冲数,就是频率
TH0=TL0=0;
TR0=1;
}
}
void fre_display_init()
{
frequence_get();
fre_display[0]=0x40;
fre_display[1]=smg_tab[2];
fre_display[2]=0x40;
fre_display[3]=smg_tab[frequence/10000];
fre_display[4]=smg_tab[frequence/1000%10];
fre_display[5]=smg_tab[frequence/100%10];
fre_display[6]=smg_tab[frequence/10%10];
fre_display[7]=smg_tab[frequence%10];
}
void period_display_init()
{
period=1000000/frequence;
period_display[0]=0x40;
period_display[1]=smg_tab[2];
period_display[2]=0x40;
period_display[3]=smg_tab[period/10000];
period_display[4]=smg_tab[period/1000%10];
period_display[5]=smg_tab[period/100%10];
period_display[6]=smg_tab[period/10%10];
period_display[7]=smg_tab[period%10];
}
void ask_display_init()
{
ask_display[0]=0x00;
ask_display[1]=0x00;
ask_display[2]=0x00;
ask_display[3]=0x00;
ask_display[4]=0x00;
ask_display[5]=0x00;
ask_display[6]=smg_tab[0];
ask_display[7]=smg_tab[kinds_of_things];
ask_time_display[0]=smg_tab[ask_shi/10];
ask_time_display[1]=smg_tab[ask_shi%10];
ask_time_display[2]=0x40;
ask_time_display[3]=smg_tab[ask_fen/10];
ask_time_display[4]=smg_tab[ask_fen%10];
ask_time_display[5]=0x40;
ask_time_display[6]=smg_tab[ask_miao/10];
ask_time_display[7]=smg_tab[ask_miao%10];
}
void Timer1Init(void) //1毫秒@11.0592MHz
{
AUXR |= 0x40; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0xCD; //设置定时初值
TH1 = 0xD4; //设置定时初值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1=1;
EA=1;
}
void Timer0Init(void) //1毫秒@11.0592MHz
{
AUXR &= 0x7f; //定时器时钟1T模式
TMOD = 0x04; //设置定时器模式
TL0 = 0X00; //设置定时初值
TH0 = 0X00; //设置定时初值
TR0 = 1; //定时器0开始计时
ET0=1;
}
void timer1() interrupt 3
{
uchar i;
uchar smg_count;
uint ms500_count;
smg_count++;
ms500_count++;
if(smg_count==3)
{
smg_count=0;
P2=(P2&0X1F)|0XC0;
P0=smg_wei[i];
P2=P2&0X1F;
if(mode_display==0) //时间显示界面
{
P2=(P2&0X1F)|0Xe0;
P0=~time_display[i];
P2=P2&0X1F;
}
if(mode_display==1) //电压显示界面
{
P2=(P2&0X1F)|0Xe0;
P0=~AD_display[i];
P2=P2&0X1F;
}
if(mode_display==2) //频率显示界面
{
P2=(P2&0X1F)|0Xe0;
P0=~fre_display[i];
P2=P2&0X1F;
}
if(mode_display==3) //设置时间界面
{
P2=(P2&0X1F)|0Xe0;
P0=~set_time_display[i];
P2=P2&0X1F;
}
if(mode_display==4) //设置电压上下限界面
{
P2=(P2&0X1F)|0Xe0;
P0=~set_ad_display[i];
P2=P2&0X1F;
}
if(mode_display==5) //周期显示界面
{
P2=(P2&0X1F)|0Xe0;
P0=~period_display[i];
P2=P2&0X1F;
}
if(mode_display==6) //查询界面
{
P2=(P2&0X1F)|0Xe0;
P0=~ask_display[i];
P2=P2&0X1F;
}
if(mode_display==7) //查询事件发生时间界面
{
P2=(P2&0X1F)|0Xe0;
P0=~ask_time_display[i];
P2=P2&0X1F;
}
i++;
if(i==8)
i=0;
}
if(ms500_count==500)
{
ms500_count=0;
flag500ms=1;
blink_flag=~blink_flag;
}
}
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 108;
j = 145;
do
{
while (--j);
} while (--i);
}
按键模块
#include "key.h"
unsigned char key_init()
{
static unsigned char key_state=0;
unsigned char key1,key2;
unsigned char key_value=0;
unsigned char key_press;
P30=0; P31=0; P32=0; P33=0; P34=1; P35=1; P42=1; P44=1;
if(P34==0) key1=0xe0;
if(P35==0) key1=0xd0;
if(P42==0) key1=0xb0;
if(P44==0) key1=0x70;
if((P34==1)&&(P35==1)&&(P42==1)&&(P44==1))
key1=0xf0;
P30=1; P31=1; P32=1; P33=1; P34=0; P35=0; P42=0; P44=0;
if(P30==0) key2=0x0e;
if(P31==0) key2=0x0d;
if(P32==0) key2=0x0b;
if(P33==0) key2=0x07;
if((P30==1)&&(P31==1)&&(P32==1)&&(P33==1))
key2=0x0f;
key_press=key1|key2;
switch(key_state)
{
case 0:
if(key_press!=0xff)
key_state=1;
break;
case 1:
if(key_press!=0xff)
{
if(key_press==0x7e) key_value=7;
if(key_press==0x7d) key_value=6;
if(key_press==0x7b) key_value=5;
if(key_press==0x77) key_value=4;
if(key_press==0xBe) key_value=11;
if(key_press==0xBd) key_value=10;
if(key_press==0xBb) key_value=9;
if(key_press==0xB7) key_value=8;
if(key_press==0xDe) key_value=15;
if(key_press==0xDd) key_value=14;
if(key_press==0xDb) key_value=13;
if(key_press==0xD7) key_value=12;
if(key_press==0xEe) key_value=19;
if(key_press==0xEd) key_value=18;
if(key_press==0xEb) key_value=17;
if(key_press==0xE7) key_value=16;
key_state=2;
}
else
key_state=0;
break;
case 2:
if(key_press==0xff)
key_state=0;
break;
}
return key_value;
}
EEPROM模块
/*
程序说明: IIC总线驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台(12MHz)
日 期: 2011-8-9
*/
#include "iic.h"
//总线启动条件
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
somenop;
SDA = 0;
somenop;
SCL = 0;
}
//总线停止条件
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
somenop;
SDA = 1;
}
/*IIC总线协议规定,每传送一个字节数据后,都要有一个应答信号,以确定数据传送是否被对方收到,
应答信号由接收设备产生,在SCL为高电平期间,接收设备将SDA拉为低电平表示数据传输正确,即产生了应答。*/
//应答位控制
void IIC_Ack(unsigned char ackbit) //当ackbit为1时,表示单片机对从设备发送来数据的应答
//当ackbit为0时,表示主机接收了最后一个字节,因此不再应答,结束通信
{
if(ackbit)
{
SDA = 0;
}
else
{
SDA = 1;
}
somenop;
SCL = 1;
somenop;
SCL = 0;
SDA = 1;
somenop;
}
//等待应答
bit IIC_WaitAck(void)
{
SDA = 1;
somenop;
SCL = 1;
somenop;
if(SDA) //在SCL为高电平期间,因为接收设备未将SDA拉低,所以默认未接收到应答,结束IIC通信
{
SCL = 0;
IIC_Stop();
return 0;
}
else //接收到应答,返回1,继续下一个数据字节的传输
{
SCL = 0;
return 1;
}
}
//通过I2C总线发送数据
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0;i<8;i++)
{
if(byt&0x80)
{
SDA = 1;
}
else
{
SDA = 0;
}
somenop;
SCL = 1;
byt <<= 1;
somenop;
SCL = 0;
}
}
//从I2C总线上接收数据
unsigned char IIC_RecByte(void)
{
unsigned char da;
unsigned char i;
for(i=0;i<8;i++)
{
SCL = 1;
somenop;
da <<= 1;
if(SDA)
da |= 0x01;
SCL = 0;
somenop;
}
return da;
}
unsigned char read_pcf8591(unsigned char addr)
{
unsigned char temp;
ET1=0;
ET0=0;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_Ack(0);
IIC_Stop();
ET1=1;
ET0=1;
return temp;
}
void Write_eeprom(unsigned char addr,unsigned char dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
unsigned char Read_eeprom(unsigned char addr)
{
unsigned char temp;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(addr);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_Ack(0);
IIC_Stop();
return temp;
}
DS1302模块
#include "ds1302.h"
/********************************************************************/
/*单字节写入一字节数据*/
void Write_Ds1302_Byte(unsigned char dat)
{
unsigned char i;
SCK = 0;
for (i=0;i<8;i++)
{
if (dat & 0x01) // 等价于if((addr & 0x01) ==1)
{
SDA_SET; //#define SDA_SET SDA=1 /*电平置高*/
}
else
{
SDA_CLR; //#define SDA_CLR SDA=0 /*电平置低*/
}
SCK_SET;
SCK_CLR;
dat = dat >> 1;
}
}
/********************************************************************/
/*单字节读出一字节数据*/
unsigned char Read_Ds1302_Byte(void)
{
unsigned char i, dat=0;
for (i=0;i<8;i++)
{
dat = dat >> 1;
if (SDA_R) //等价于if(SDA_R==1) #define SDA_R SDA /*电平读取*/
{
dat |= 0x80;
}
else
{
dat &= 0x7F;
}
SCK_SET;
SCK_CLR;
}
return dat;
}
/********************************************************************/
/*向DS1302 单字节写入一字节数据*/
void Ds1302_Single_Byte_Write(unsigned char addr, unsigned char dat)
{
RST_CLR; /*RST脚置低,实现DS1302的初始化*/
SCK_CLR; /*SCK脚置低,实现DS1302的初始化*/
RST_SET; /*启动DS1302总线,RST=1电平置高 */
addr = addr & 0xFE;
Write_Ds1302_Byte(addr); /*写入目标地址:addr,保证是写操作,写之前将最低位置零*/
Write_Ds1302_Byte(dat); /*写入数据:dat*/
RST_CLR; /*停止DS1302总线*/
}
/********************************************************************/
/*从DS1302单字节读出一字节数据*/
unsigned char Ds1302_Single_Byte_Read(unsigned char addr)
{
unsigned char temp;
RST_CLR; /*RST脚置低,实现DS1302的初始化*/
SCK_CLR; /*SCK脚置低,实现DS1302的初始化*/
RST_SET; /*启动DS1302总线,RST=1电平置高 */
addr = addr | 0x01;
Write_Ds1302_Byte(addr); /*写入目标地址:addr,保证是读操作,写之前将最低位置高*/
temp=Read_Ds1302_Byte(); /*从DS1302中读出一个字节的数据*/
RST_CLR; /*停止DS1302总线*/
SDA_CLR;
return temp;
}
void ds1302_init()
{
Ds1302_Single_Byte_Write(ds1302_control_addr,0x00);
Ds1302_Single_Byte_Write(ds1302_sec_addr,0x55);
Ds1302_Single_Byte_Write(ds1302_min_addr,0x59);
Ds1302_Single_Byte_Write(ds1302_hr_addr,0x23);
Ds1302_Single_Byte_Write(ds1302_control_addr,0x80);
}
以上就是代码全部内容,觉得有用的话,留个关注和赞再走吧~
附上工程包:蓝桥杯第七届国赛试题