SMI(MDC/MDIO)总线接口介绍
1. MDIO接口
SMI:串行管理接口(Serial Management Interface),也被称作MII管理接口(MII Management Interface),包括MDC和MDIO两条信号线。MDIO是一个PHY的管理接口,用来读/写PHY的寄存器,以控制PHY的行为或获取PHY的状态,MDC为MDIO提供时钟。
MDIO原本是为MII总线接口定义的,MII用于连接MAC和PHY,包含两种信号接口:
1. 一个数据接口用于MAC和PHY之间接收和发送以太网帧数据。
2. 一个PHY管理接口,即MDIO,用于读写每个PHY的控制寄存器和状态寄存器,以达到控制PHY行为和监控PHY状态的目的。
MDIO是双向的,只支持一个MAC连接最多32个PHY的连接方式,且MAC作为master,PHY作为slave。在写PHY寄存器的时候,由MAC驱动MDIO向PHY写入数据;在读PHY寄存器时,前半段由MAC驱动发送寄存器地址,后半段由PHY驱动回复寄存器的值。
MDC要求由MAC输出,是非周期性的,即不要求提供固定频率的时钟,对于PHY芯片则作为输入,以在上升沿触发MDIO的读写。MDC的时钟频率可以是DC-2.5MHz,即最小的时钟周期为400ns。
2. MDIO数据传输协议
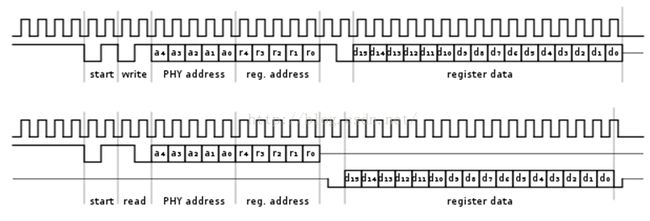
MDIO数据格式定义在IEEE 802.3以太网标准中,如下图所示(数据传输顺序为从左至右):
|
|
Preamble (32bits) |
Start (2bits) |
OP Code (2bits) |
PHYAD (5bits) |
REGAD (5bits) |
Turn Around (2bits) |
Data (16bits) |
Idle |
| Read |
1.......1 |
01 |
10 |
A4A3A2A1A0 |
R4R3R2R1R0 |
Z0 |
D15.......D0 |
Z* |
| Write |
1.......1 |
01 |
01 |
A4A3A2A1A0 |
R4R3R2R1R0 |
10 |
D15.......D0 |
Z* |
上图中*表示高阻态,这时MDIO的状态由一个外部的1.5KΩ电阻决定。
Preamble+Start:32bits的前导码以及2bit的开始位。
OP Code:2bits的操作码,10表示读,01表示写。
PHYAD:5bits的PHY地址,一般PHY地址从0开始顺序编号,例如6口switch中PHY地址为0-5。
REGAD:5bits的寄存器地址,即要读或写的寄存器。
Turn Around:2bits的TA,在读命令中,MDIO在此时由MAC驱动改为PHY驱动,并等待一个时钟周期准备发送数据。在写命令中,不需要MDIO方向发生变化,则只是等待两个时钟周期准备写入数据。
Data:16bits数据,在读命令中,PHY芯片将读到的对应PHYAD的REGAD寄存器的数据写到Data中,在写命令中,MAC将要写入对应PHYAD的REGAD寄存器的值写入Data中。
Idle:空闲状态,此时MDIO无源驱动,处高阻状态,但一般用上拉电阻使其处在高电平。
需要注意的是,为了保证PHY能准确采样,当MAC向MDIO写数据的时候,需要在MDC的上升沿之前就把数据写到MDIO上,要求等待10ns以上再发出一个MDC的上升沿。而为了保证MAC能准确采样,当PHY向MDIO写数据时,这个clock-to-data的delay时间范围可以是0-300ns(小于上面提到的400ns)。这个规定使接口的实现变得简单,但一定程度上限制了总线带宽。
IEEE 802.3还定义了扩展的SMI数据格式,包括read,write以及set address和readincrement,不过我们在此不做讨论。
PHY和MAC芯片通常都内置MDIO读写的实现,我们只需要按照硬件手册布线,按照软件手册来操作MDIO的读写即可,一般不需要自己实现MDIO的读写操作。
下面以获取和设置某个PHY的速率和双工模式为例,我们来看一下实际MDIO的波形。Register 0是PHYControl寄存器,可以设置PHY的速率和双工模式。
MDC的波形如下:
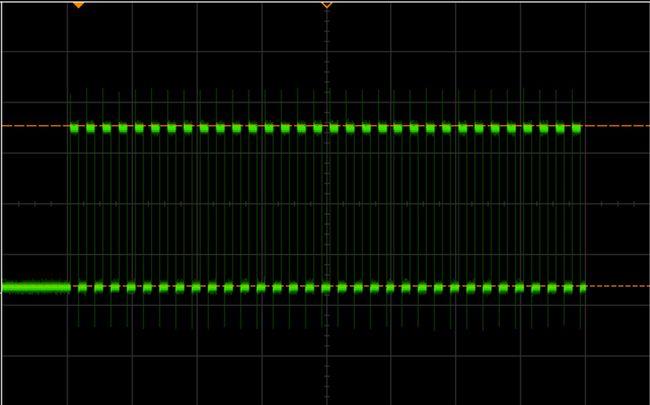
我在抓波形的时候没有将MDC和MDIO一起抓,所以看不出两者的关系,抱歉~
1. 读取PHY6的register 0:
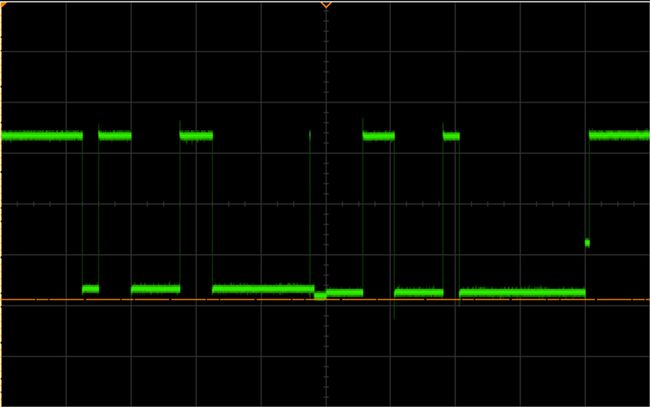
上面中MDIO上的数据为:

T表示Turn Around,可以看到在读数据的时候发生了两次TA:一次在MAC发送完REGAD后开始接收PHY的data之前,MDIO由MAC驱动改为PHY驱动;一次在PHY发送完data后,MDIO重新改为MAC驱动的时候。
2. 将PHY5设置为强制10M全双工,设置PHY5的register 0为0x0100:

上图中MDIO上的数据为:

写的时候一直都是MAC驱动MDIO,因此不存在MDIO源的改变。
3. 尝试用GPIO模拟MDC/MDIO
在某些芯片上可能没有提供MDC/MDIO接口,可以通过GPIO(General Purpose Input/Output)来模拟,GPIO可实现串行输入输出,且一般CPU上会提供很多GPIO接口供用户自定义使用。
每组SMI需要两个GPIO口分别来模拟MDC和MDIO,首先需要保证这两个GPIO口不作其他用途,且相应的复用模式设置为GPIO模式。
模拟MDC很简单,就是将相应GPIO设置为输出模式(由MAC提供时钟),在MDIO上发送和读取数据时提供时钟即可,对时钟频率没有太严格的要求,在前面已做了说明。具体来说,向GPIO写0即为低电平,向GPIO写1即为高电平,电平持续时间可通过usleep等待或执行数条空指令来实现。
模拟MDIO就是实现一套read/write时序,也通过向GPIO写0或写1实现,实现TA则为改变GPIO的输入/输出模式,而read的后半段即为从GPIO上读数据。
需要用到的GPIO寄存器为GPIO_DIR,GPIO_DATA和GPIO_IE:
GPIO_DIR:用于配置GPIO的方向为输入或输出,当GPIO为输入时,MAC可读取GPIO上的数据,当GPIO为输出时,MAC可向GPIO上写数据。
GPIO_DATA:当GPIO为输入时,GPIO_DATA即为GPIO上的数据,当GPIO为输出时,向GPIO_DATA写数据即写到了GPIO上。
GPIO_IE:GPIO作为输入时可作为中断源,在用GPIO模拟SMI时,要关闭相应GPIO线的中断。
这三个寄存器的详细用法要参考相应芯片的datasheet。
对于GPIO模拟SMI的具体软件实现,这里不再介绍,有了上述基础知识,应该很容易实现。 对于Linux系统,内核中提供了一个mdio-bitbang.c,里面实现了一套软件实现的MDIO/MDC接口时序可供参考。