将自己训练的MASK-RCNN模型用于摄像头实时检测
之前已经训练出自己的MASK-RCNN模型,并在单张图片上经行了测试,那么如何在摄像头中实时检测呢,今天就实现这个功能。其实方法很简单,主要就是获取摄像头的frame,然后对这个frame进行检测就行了。
import cv2
import numpy as np
from mrcnn.config import Config
class MouseConfig(Config):
"""Configuration for training on the toy dataset.
Derives from the base Config class and overrides some values.
"""
# Give the configuration a recognizable name
NAME = "mouse"
# We use a GPU with 12GB memory, which can fit two images.
# Adjust down if you use a smaller GPU.
IMAGES_PER_GPU = 1
# Number of classes (including background)
NUM_CLASSES = 1 + 1 # Background + balloon
# Number of training steps per epoch
STEPS_PER_EPOCH = 100
# Skip detections with < 90% confidence
DETECTION_MIN_CONFIDENCE = 0.9
def random_colors(N):
np.random.seed(1)
colors = [tuple(255 * np.random.rand(3)) for _ in range(N)]
return colors
def apply_mask(image, mask, color, alpha=0.5):
for n, c in enumerate(color):
image[:, :, n] = np.where(
mask == 1,
image[:, :, n] * (1 - alpha) + alpha * c,
image[:, :, n]
)
return image
def display_instances(image, boxes, masks, ids, names, scores):
n_instances = boxes.shape[0]
if not n_instances:
print('No instances to display')
else:
assert boxes.shape[0] == masks.shape[-1] == ids.shape[0]
colors = random_colors(n_instances)
height, width = image.shape[:2]
for i, color in enumerate(colors):
if not np.any(boxes[i]):
continue
y1, x1, y2, x2 = boxes[i]
mask = masks[:, :, i]
image = apply_mask(image, mask, color)
image = cv2.rectangle(image, (x1, y1), (x2, y2), color, 2)
label = names[ids[i]]
score = scores[i] if scores is not None else None
caption = '{}{:.2f}'.format(label, score) if score else label
image = cv2.putText(
image, caption, (x1, y1), cv2.FONT_HERSHEY_COMPLEX, 0.7, color, 2
)
return image
if __name__ == '__main__':
import os
import sys
import random
import utils
ROOT_DIR = os.path.abspath("../")
sys.path.append(ROOT_DIR)
from mrcnn import utils
import mrcnn.model as modellib
sys.path.append(os.path.join(ROOT_DIR, "samples/coco/")) # To find local version
MODEL_DIR = os.path.join(ROOT_DIR, "logs")
COCO_MODEL_PATH = os.path.join(ROOT_DIR, "mask_rcnn_mouse_0030.h5")
print('COCO_MODEL_PATH: ',COCO_MODEL_PATH)
if not os.path.exists(COCO_MODEL_PATH):
print('cannot find coco_model')
class InferenceConfig(MouseConfig):
GPU_COUNT = 1
IMAGES_PER_GPU = 1
config = InferenceConfig()
config.display()
model = modellib.MaskRCNN(
mode="inference", model_dir=MODEL_DIR, config=config
)
# Load weights trained on MS-COCO
model.load_weights(COCO_MODEL_PATH, by_name=True)
class_names = ['BG', 'mouse', 'person', 'bicycle', 'car', 'motorcycle', 'airplane',
'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird',
'cat', 'dog', 'horse', 'sheep', 'cow', 'elephant', 'bear',
'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie',
'suitcase', 'frisbee', 'skis', 'snowboard', 'sports ball',
'kite', 'baseball bat', 'baseball glove', 'skateboard',
'surfboard', 'tennis racket', 'bottle', 'wine glass', 'cup',
'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza',
'donut', 'cake', 'chair', 'couch', 'potted plant', 'bed',
'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote',
'keyboard', 'cell phone', 'microwave', 'oven', 'toaster',
'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors',
'teddy bear', 'hair drier', 'toothbrush']
capture = cv2.VideoCapture(1)
# capture.set(cv2.CAP_PROP_FRAME_WIDTH, 1920)
# capture.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080)
while True:
ret, frame = capture.read()
results = model.detect([frame], verbose=0)
r = results[0]
frame = display_instances(
frame, r['rois'], r['masks'], r['class_ids'],
class_names, r['scores']
)
cv2.imshow('camera1', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
capture.release()
cv2.destroyAllWindows()
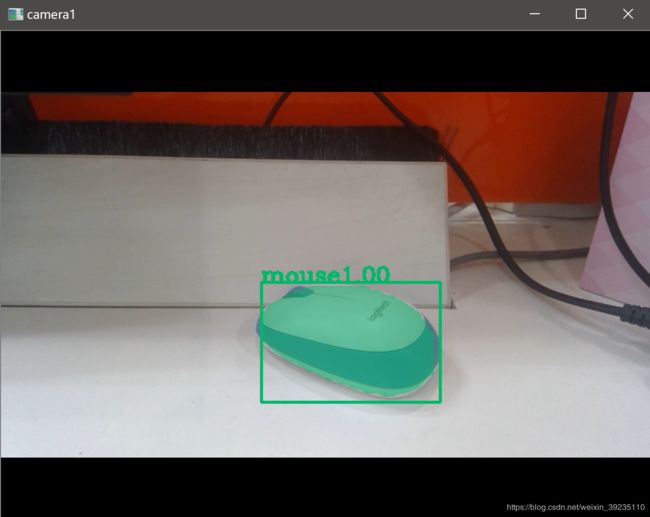
摄像头实时显示的结果如下:
参考:https://blog.csdn.net/eereere/article/details/80178595