【文献阅读】Asymmetric Non-local Neural Networks for Semantic Segmentation
原文链接:https://arxiv.org/abs/1908.07678
代码:https://github.com/MendelXu/ANN.git
Non-local 是一种特别有用的语义分割技术,但也因其难以进行计算和占用GPU内存而受到批评。本文提出了Asymmetric Non-local Neural Network,其中有两个突出的组成部分:Asymmetric Pyramid Non-local Block(APNB) 和 Asymmetric Fusion Non-local Block(AFNB)。APNB利用金字塔采样模块,在不牺牲性能的前提下,极大地减少了计算和内存消耗;AFNB是由APNB演化而来的,在充分考虑了长期相关性的前提下,融合了不同层次的特征,从而大大提高了性能。
核心思路是:
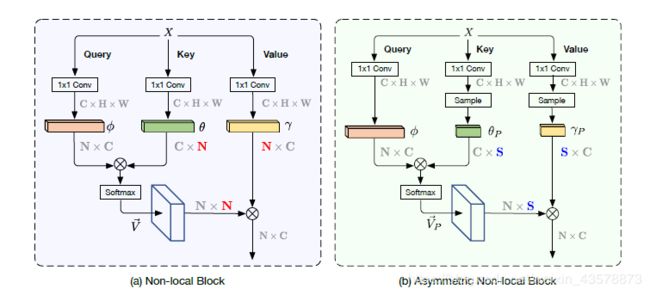
只要query分支和key分支的输出保持相同的大小,Non-local的输出大小就保持不变。考虑到这一点,如果只从key分支和value分支中选取几个有代表性的点作为样本,就有可能在不牺牲性能的情况下显著降低时间复杂度。如下图所示,其中, S ≪ N S \ll N S≪N。
Asymmetric Non-local Neural Network
提出了APNB和AFNB,其中APNB旨在减少Non-local的计算开销,AFNB提高了Non-local的学习能力,从而提高了分割性能。
重识Non-local

考虑输入特征图 X ∈ R C × H × W X \in \mathbb{R}^{C \times H \times W} X∈RC×H×W,三个 1 × 1 1 \times 1 1×1卷积 W ϕ W_{\phi} Wϕ、 W θ W_{\theta} Wθ和 W γ W_{\gamma} Wγ用来将 X X X变换到不同的嵌入式空间 ϕ ∈ R C ′ × H × W \phi \in \mathbb{R}^{C' \times H \times W} ϕ∈RC′×H×W、 θ ∈ R C ′ × H × W \theta \in \mathbb{R}^{C' \times H \times W} θ∈RC′×H×W、 γ ∈ R C ′ × H × W \gamma \in \mathbb{R}^{C' \times H \times W} γ∈RC′×H×W
ϕ = W ϕ ( X ) , θ = W θ ( X ) , γ = W γ ( X ) \phi = W_{\phi}(X), \space \theta = W_{\theta}(X), \space \gamma = W_{\gamma}(X) ϕ=Wϕ(X), θ=Wθ(X), γ=Wγ(X)
接着将他们三个 f l a t t e n flatten flatten为 C ′ × N C' \times N C′×N, N N N为空间中总像素数, N = H × W N = H \times W N=H×W。相似度矩阵 V ∈ R N × N V \in \mathbb{R}^{N \times N} V∈RN×N可由矩阵乘法计算
V = ϕ T × θ V = \phi^T \times \theta V=ϕT×θ
接着,将 V V V进行归一化
V ⃗ = f ( V ) \vec{V}=f(V) V=f(V)
f f f有三种形式,分别为 s o f t m a x softmax softmax、 r e s c a l i n g rescaling rescaling和 n o n e none none,这里选择用 s o f t m a x softmax softmax。对于 γ \gamma γ中的每个位置,都可以计算输出为
O = V ⃗ × γ T O=\vec{V} \times \gamma^T O=V×γT
其中, O ∈ R N × C ′ O \in \mathbb{R}^{N \times C'} O∈RN×C′。通过参考Non-local的设计,最终的输出为
Y = W o ( O T ) + X o r Y = c a t ( W o ( O T ) , X ) Y = W_o(O^T) + X \space or \space Y = cat(W_o(O^T),X) Y=Wo(OT)+X or Y=cat(Wo(OT),X)
其中, W o W_o Wo使用 1 × 1 1 \times 1 1×1卷积,作为一个加权参数来调整Non-local的重要性,并且将通道维度从 C ′ C' C′还原为 C C C。
Asymmetric Pyramid Nonlocal Block(APNB)
动机和分析
Non-local在两个矩阵相乘的时间复杂度为 O ( C ′ N 2 ) = O ( C ′ H 2 W 2 ) O(C'N^2)=O(C'H^2W^2) O(C′N2)=O(C′H2W2)。在语义分割任务中,网络的输出通常有较大的分辨率来保持细节的语义信息, N N N通常很大。
一个更直接的 p i p e l i n e pipeline pipeline如下:
R N × C ′ × R C ′ × N → R N × N × R N × C ′ → R N × C ′ \mathbb{R}^{N \times C'} \times \mathbb{R}^{C' \times N}\rightarrow \mathbb{R}^{N \times N} \times \mathbb{R}^{N \times C'} \rightarrow \mathbb{R}^{N \times C'} RN×C′×RC′×N→RN×N×RN×C′→RN×C′
通过将 N N N变为 S S S( S ≪ N S \ll N S≪N),输出尺寸保持不变
R N × C ′ × R C ′ × S → R N × S × R S × C ′ → R N × C ′ \mathbb{R}^{N \times C'} \times \mathbb{R}^{C' \times S}\rightarrow \mathbb{R}^{N \times S} \times \mathbb{R}^{S \times C'} \rightarrow \mathbb{R}^{N \times C'} RN×C′×RC′×S→RN×S×RS×C′→RN×C′
将 N N N变为更小的 S S S相当于从图中采样几个有代表性的点,而不是考虑空间中所有的点,从而将计算量大大减少。
方法

在 θ \theta θ和 γ \gamma γ后,通过添加采样模块 P θ P_\theta Pθ和 P γ P_\gamma Pγ,来采样一些稀疏的锚点,得到 θ P ∈ R C ′ × S \theta_P \in \mathbb{R}^{C' \times S} θP∈RC′×S和 γ P ∈ R C ′ × S \gamma_P \in \mathbb{R}^{C' \times S} γP∈RC′×S,其中 S S S为采样锚点的个数。数学公式为
θ P = P θ ( θ ) , γ P = P γ ( γ ) \theta_P = P_{\theta}(\theta),\space \gamma_P = P_{\gamma}(\gamma) θP=Pθ(θ), γP=Pγ(γ)
ϕ \phi ϕ与锚点 θ P \theta_P θP间的相似度矩阵 V P V_P VP如下
V P = ϕ T × θ P V_P=\phi^T \times \theta_P VP=ϕT×θP
其中, V P V_P VP是一个不对称的矩阵,大小为 N × S N \times S N×S。接下来与Non-local一样进行归一化,得到 V P ⃗ \vec{V_P} VP。 a t t e n t i o n attention attention输出为
O P = V P ⃗ × γ P T O_P=\vec{V_P} \times \gamma_P^T OP=VP×γPT
最终的输出 Y P Y_P YP为
Y P = c a t ( W o ( O P T ) , X ) Y_P = cat(W_o(O_P^T),X) YP=cat(Wo(OPT),X)
时间复杂度仅为 O ( C ′ N S ) O(C'NS) O(C′NS),比标准Non-local中的 O ( C ′ N 2 ) O(C'N^2) O(C′N2)小很多。
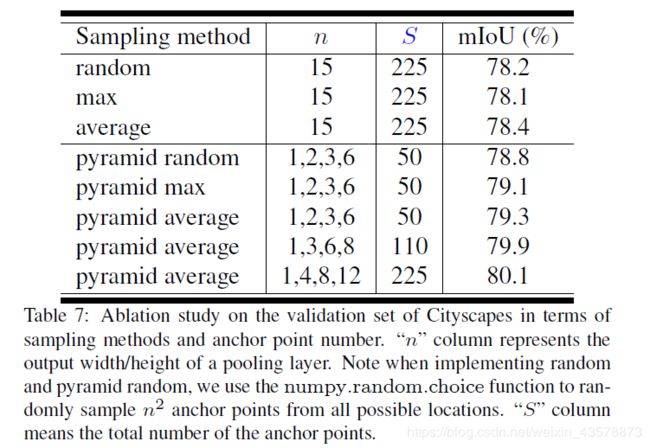
前面的工作表明,全局和多尺度对语义分割很有帮助,因此,在Non-local块中嵌入金字塔池化来增强全局表示。
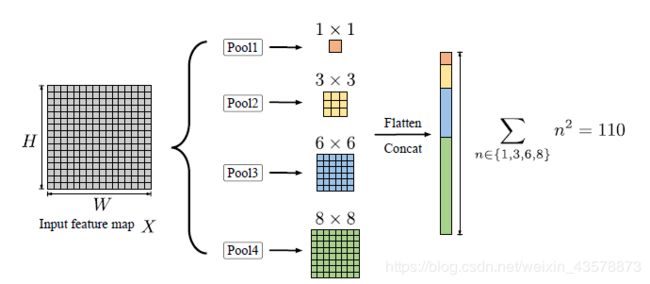
这四个池化结果被平铺并连接起来,作为被采样的点。设置 n ⊆ { 1 , 3 , 6 , 8 } n \subseteq \{1,3,6,8\} n⊆{1,3,6,8},则锚点的总量为
S = 110 = ∑ n ⊆ { 1 , 3 , 6 , 8 } n 2 S = 110 = \sum_{n \subseteq \{1,3,6,8\}}n^2 S=110=n⊆{1,3,6,8}∑n2
Asymmetric Fusion Nonlocal Block(AFNB)
不同层级的特征融合对语义分割有帮助,将特征融合加入到Non-local中,得到Fusion Non-local Block。
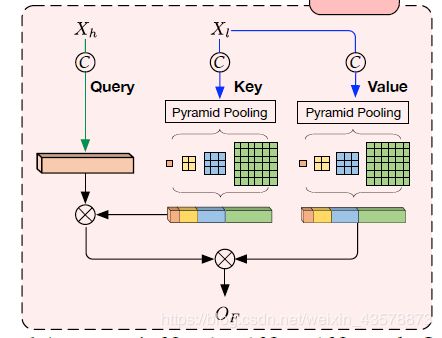
标准的Non-local只有一个输入源,而FNB有两个输入源:一个高级特征图 X h ∈ R C h × N h X_h\in \mathbb{R}^{C_h \times N_h} Xh∈RCh×Nh和一个低级特征图 X l ∈ R C l × N l X_l \in \mathbb{R}^{C_l \times N_l} Xl∈RCl×Nl。同样的, 1 × 1 1 \times 1 1×1卷积 W ϕ h W_{\phi}^h Wϕh、 W θ l W_{\theta}^l Wθl和 W γ l W_{\gamma}^l Wγl被用来将 X h X_h Xh和 X l X_l Xl变换到嵌入式空间 ϕ h ∈ R C ′ × N h \phi_h \in \mathbb{R}^{C' \times N_h} ϕh∈RC′×Nh、 θ l ∈ R C ′ × N l \theta_l \in \mathbb{R}^{C' \times N_l} θl∈RC′×Nl和 γ l ∈ R C ′ × N l \gamma_l \in \mathbb{R}^{C' \times N_l} γl∈RC′×Nl
ϕ h = W ϕ h ( X h ) , θ l = W θ l ( X l ) , γ l = W γ l ( X l ) \phi_h=W_{\phi}^h(X_h),\space \theta_l=W_{\theta}^l(X_l),\space \gamma_l=W_{\gamma}^l(X_l) ϕh=Wϕh(Xh), θl=Wθl(Xl), γl=Wγl(Xl)
ϕ h \phi_h ϕh和 θ l \theta_l θl间的相似度矩阵 V F ∈ R N h × N l V_F \in \mathbb{R}^{N_h \times N_l} VF∈RNh×Nl为
V F = ϕ h T × θ l V_F=\phi_h^T \times \theta_l VF=ϕhT×θl
同样的,将 V F V_F VF进行归一化得到 V F ⃗ ∈ R N h × N l \vec{V_F} \in \mathbb{R}^{N_h \times N_l} VF∈RNh×Nl。同理输出为
O F = V F ⃗ × γ l T O_F=\vec{V_F} \times \gamma_l^T OF=VF×γlT
Y P = c a t ( W o ( O P T ) , X ) Y_P = cat(W_o(O_P^T),X) YP=cat(Wo(OPT),X)
网络结构

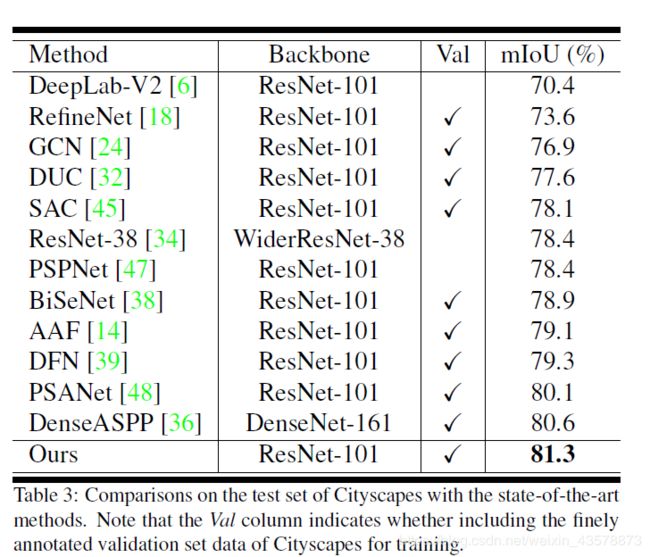
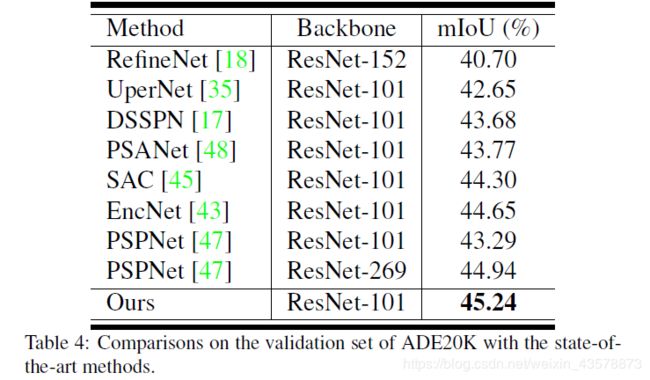
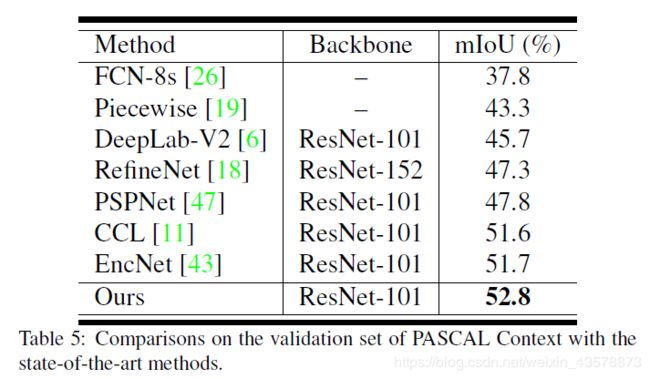
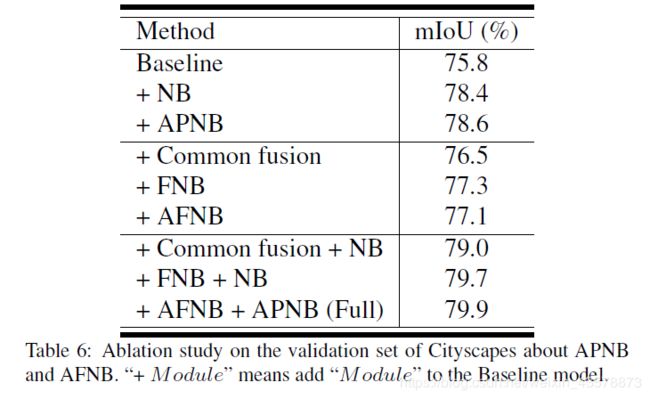
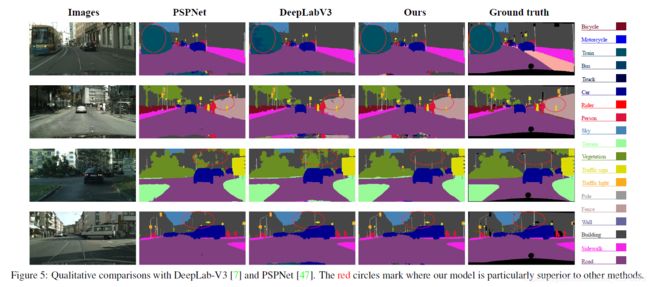
实验结果