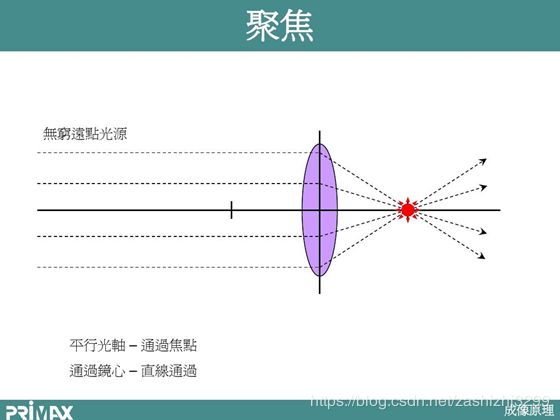
摄像机成像原理(模型)
一般摄像机简化为小孔成像的理想模型(线性模型),因为摄像机镜头(视场角)很小,相当于被拍摄物体通过小孔投影到感光元件CCD/CMOS上。
对于加了各种镜头的摄像机,镜头不是平面(凸镜凹镜),小孔成像的像发生畸变,属于非线性模型,需要额外矫正。
通过标定可求出摄像机各种内外参数,也包括镜头畸变。
1、理想线性摄像机小孔成像示意图

如图,小孔成像,可实施实验。能否看到倒立的像,取决于物体和孔的距离,以及感光板与孔的距离,按图中公式计算。
其中f是焦距。

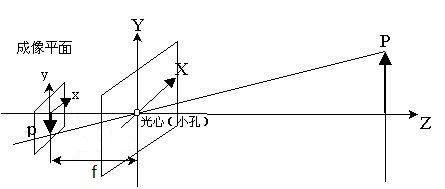
上2个图,为成像模型实际情况,像p与物体P分别位于小孔两侧,且是倒立成像,不利于观看。
2、坐标系转换
坐标转换就是,通过坐标系参数矩阵变换,该用实际物体坐标表示图片像素点,参数矩阵就是摄像机的内参。
下图,将倒立的像p颠倒并平移到小孔o的另一边,跟实际物体在一边成比例,且为正向,方便画图。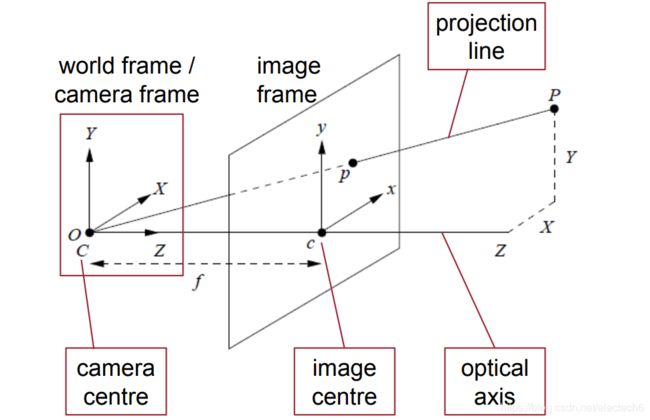
①世界坐标系:是客观三维世界的绝对坐标系,也称客观坐标系。物体实际坐标,用(Xw, Yw, Zw)表示其坐标值。
②相机坐标系(光心坐标系):以相机的光心(小孔圆心)为坐标原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,相机的光轴为Z 轴,用(Xc, Yc, Zc)表示其坐标值。
③图像坐标系:以CCD 图像平面的中心为坐标原点,X轴和Y 轴分别平行于图像平面的两条垂直边,用( x , y )表示其坐标值。图像坐标系是用物理单位(例如毫米)表示像素在图像中的位置。
④像素坐标系:以 CCD 图像平面的左上角顶点为原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴,用(u , v )表示其坐标值。数码相机采集的图像首先是形成标准电信号的形式,然后再通过模数转换变换为数字图像。每幅图像的存储形式是M × N的数组,M 行 N 列的图像中的每一个元素的数值代表的是图像点的灰度。这样的每个元素叫像素,像素坐标系就是以像素为单位的图像坐标系。
如下图,是2个坐标系,像素坐标系uv和图像坐标系xyimg。
注意到两个坐标系y轴不在一条线上,是因为一般图像坐标从左上角开始标识,而不是从图像中间标识。
具体到各类书籍文章和摄像机说明书,可能转换公式不完全一致,但原理都一样。

2、非线性摄像机模型
参考文献:
1、从零开始一起学习SLAM | 相机成像模型 - electech6的博客 - CSDN博客 https://blog.csdn.net/electech6/article/details/83617892
2、SLAM入门之视觉里程计(2):相机模型(内参数,外参数) - Brook_icv - 博客园 https://www.cnblogs.com/wangguchangqing/p/8126333.html
3、