NMS非极大值抑制的原理与代码实现
打波广告勒,女朋友的淘宝店:https://item.taobao.com/item.htm?spm=a2oq0.12575281.0.0.25911deb2q0w5S&ft=t&id=591621534947 欢迎大家进店收藏关注观看哦,如需本文的资料及资源,也可以淘宝旺旺问我拿哦。
原理
对于Bounding Box的列表B及其对应的置信度S,采用下面的计算方式.选择具有最大score的检测框M,将其从B集合中移除并加入到最终的检测结果D中.通常将B中剩余检测框中与M的IoU大于阈值Nt的框从B中移除.重复这个过程,直到B为空。
实现步骤
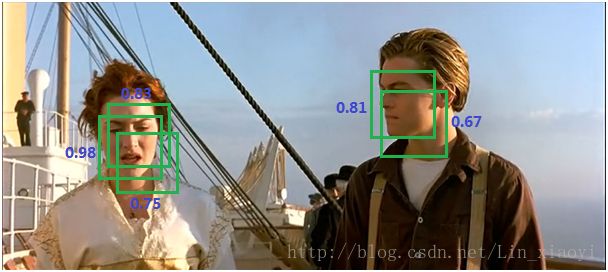
(1)将所有框的得分排序,选中最高分及其对应的框
(2)遍历其余的框,如果和当前最高分框的重叠面积(IOU)大于一定阈值,我们就将框删除。
(3)从未处理的框中继续选一个得分最高的,重复上述过程。
实现代码
MATLAB
%% NMS:non maximum suppression
function pick = nms(boxes,threshold,type)
% boxes: m x 5,表示有m个框,5列分别是[x1 y1 x2 y2 score]
% threshold: IOU阈值
% type:IOU阈值的定义类型
% 输入为空,则直接返回
if isempty(boxes)
pick = [];
return;
end
% 依次取出左上角和右下角坐标以及分类器得分(置信度)
x1 = boxes(:,1);
y1 = boxes(:,2);
x2 = boxes(:,3);
y2 = boxes(:,4);
s = boxes(:,5);
% 计算每一个框的面积
area = (x2-x1+1) .* (y2-y1+1);
%将得分升序排列
[vals, I] = sort(s);
%初始化
pick = s*0;
counter = 1;
% 循环直至所有框处理完成
while ~isempty(I)
last = length(I); %当前剩余框的数量
i = I(last);%选中最后一个,即得分最高的框
pick(counter) = i;
counter = counter + 1;
%计算相交面积
xx1 = max(x1(i), x1(I(1:last-1)));
yy1 = max(y1(i), y1(I(1:last-1)));
xx2 = min(x2(i), x2(I(1:last-1)));
yy2 = min(y2(i), y2(I(1:last-1)));
w = max(0.0, xx2-xx1+1);
h = max(0.0, yy2-yy1+1);
inter = w.*h;
%不同定义下的IOU
if strcmp(type,'Min')
%重叠面积与最小框面积的比值
o = inter ./ min(area(i),area(I(1:last-1)));
else
%交集/并集
o = inter ./ (area(i) + area(I(1:last-1)) - inter);
end
%保留所有重叠面积小于阈值的框,留作下次处理
I = I(find(o<=threshold));
end
pick = pick(1:(counter-1));
end
Python
import numpy as np
cimport numpy as np
cdef inline np.float32_t max(np.float32_t a, np.float32_t b):
return a if a >= b else b
cdef inline np.float32_t min(np.float32_t a, np.float32_t b):
return a if a <= b else b
def cpu_soft_nms(np.ndarray[float, ndim=2] boxes, float sigma=0.5, float Nt=0.3, float threshold=0.001, unsigned int method=0):
cdef unsigned int N = boxes.shape[0]
cdef float iw, ih, box_area
cdef float ua
cdef int pos = 0
cdef float maxscore = 0
cdef int maxpos = 0
cdef float x1,x2,y1,y2,tx1,tx2,ty1,ty2,ts,area,weight,ov
for i in range(N):
maxscore = boxes[i, 4]
maxpos = i
tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4]
pos = i + 1
# get max box
while pos < N:
if maxscore < boxes[pos, 4]:
maxscore = boxes[pos, 4]
maxpos = pos
pos = pos + 1
# add max box as a detection
boxes[i,0] = boxes[maxpos,0]
boxes[i,1] = boxes[maxpos,1]
boxes[i,2] = boxes[maxpos,2]
boxes[i,3] = boxes[maxpos,3]
boxes[i,4] = boxes[maxpos,4]
# swap ith box with position of max box
boxes[maxpos,0] = tx1
boxes[maxpos,1] = ty1
boxes[maxpos,2] = tx2
boxes[maxpos,3] = ty2
boxes[maxpos,4] = ts
tx1 = boxes[i,0]
ty1 = boxes[i,1]
tx2 = boxes[i,2]
ty2 = boxes[i,3]
ts = boxes[i,4]
pos = i + 1
# NMS iterations, note that N changes if detection boxes fall below threshold
while pos < N:
x1 = boxes[pos, 0]
y1 = boxes[pos, 1]
x2 = boxes[pos, 2]
y2 = boxes[pos, 3]
s = boxes[pos, 4]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
iw = (min(tx2, x2) - max(tx1, x1) + 1)
if iw > 0:
ih = (min(ty2, y2) - max(ty1, y1) + 1)
if ih > 0:
ua = float((tx2 - tx1 + 1) * (ty2 - ty1 + 1) + area - iw * ih)
ov = iw * ih / ua #iou between max box and detection box
if method == 1: # linear
if ov > Nt:
weight = 1 - ov
else:
weight = 1
elif method == 2: # gaussian
weight = np.exp(-(ov * ov)/sigma)
else: # original NMS
if ov > Nt:
weight = 0
else:
weight = 1
boxes[pos, 4] = weight*boxes[pos, 4]
# if box score falls below threshold, discard the box by swapping with last box
# update N
if boxes[pos, 4] < threshold:
boxes[pos,0] = boxes[N-1, 0]
boxes[pos,1] = boxes[N-1, 1]
boxes[pos,2] = boxes[N-1, 2]
boxes[pos,3] = boxes[N-1, 3]
boxes[pos,4] = boxes[N-1, 4]
N = N - 1
pos = pos - 1
pos = pos + 1
keep = [i for i in range(N)]
return keep
def cpu_nms(np.ndarray[np.float32_t, ndim=2] dets, np.float thresh):
cdef np.ndarray[np.float32_t, ndim=1] x1 = dets[:, 0]
cdef np.ndarray[np.float32_t, ndim=1] y1 = dets[:, 1]
cdef np.ndarray[np.float32_t, ndim=1] x2 = dets[:, 2]
cdef np.ndarray[np.float32_t, ndim=1] y2 = dets[:, 3]
cdef np.ndarray[np.float32_t, ndim=1] scores = dets[:, 4]
cdef np.ndarray[np.float32_t, ndim=1] areas = (x2 - x1 + 1) * (y2 - y1 + 1)
cdef np.ndarray[np.int_t, ndim=1] order = scores.argsort()[::-1]
cdef int ndets = dets.shape[0]
cdef np.ndarray[np.int_t, ndim=1] suppressed = \
np.zeros((ndets), dtype=np.int)
# nominal indices
cdef int _i, _j
# sorted indices
cdef int i, j
# temp variables for box i's (the box currently under consideration)
cdef np.float32_t ix1, iy1, ix2, iy2, iarea
# variables for computing overlap with box j (lower scoring box)
cdef np.float32_t xx1, yy1, xx2, yy2
cdef np.float32_t w, h
cdef np.float32_t inter, ovr
keep = []
for _i in range(ndets):
i = order[_i]
if suppressed[i] == 1:
continue
keep.append(i)
ix1 = x1[i]
iy1 = y1[i]
ix2 = x2[i]
iy2 = y2[i]
iarea = areas[i]
for _j in range(_i + 1, ndets):
j = order[_j]
if suppressed[j] == 1:
continue
xx1 = max(ix1, x1[j])
yy1 = max(iy1, y1[j])
xx2 = min(ix2, x2[j])
yy2 = min(iy2, y2[j])
w = max(0.0, xx2 - xx1 + 1)
h = max(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (iarea + areas[j] - inter)
if ovr >= thresh:
suppressed[j] = 1
return keep
参考博客:http://blog.csdn.net/shuzfan/article/details/52711706
http://www.cnblogs.com/makefile/p/nms.html