CNTK与深度强化学习笔记之一: 环境搭建和基本概念
如需转载,请指明出处。
前言
深度强化学习是人工智能当前的热点,CNTK也是微软力推的深度学习框架,2.x版本比之前有了长足的进步。目前国内将这两者融合起来的文章还不多。因此写作了这个学习笔记,希望能对大家有所帮助。
硬件,开发环境以及CNTK安装
CNTK可能是为数不多的在Windows平台同样支持CUDA和cuDNN加速的框架了。CNTK某些示例,虽然在CPU的环境下面也可以运行,但是速度实在是太慢了。因此推荐支持CUDA的Nvidia GPU,支持列表这里可以查到:CUDA GPUs。从列表中可以看到,如果想要买个游戏本做深度学习,GeForce GTX 1060是移动版本里面最便宜的支持CUDA的GPU。我正是使用了这个型号的游戏本。大概测试了一下CPU和GPU训练的性能差别,在用CNTK的ConvNet的示例训练MNIST时,使用GPU一个Epoch在2秒以内,使用“nvidia-smi -l 1”命令查看GPU的使用率,在95%以上。CPU(i7-7700HQ)需要大概50秒,使用率达到了100%。
开发环境需要在Ubuntu上面(推荐使用Ubuntu 14.04或者Ubuntu 16.04,本文使用的是Ubuntu 16.04),并且推荐使用Anaconda3的最新版本(本文使用的是Anaconda3-4.4.0,Python 3.6版本)。必须用Ubuntu的原因是,官方的DQN示例使用了gym。gym是由OpenAI开发的工具集,提供了强化学习中的环境(environment)接口,用来开发和对比强化学习算法。gym目前只支持Linux(只有有限的环境可以在Windows上面运行)。gym的安装配置官方文档也很清楚了:gym。
需要说明的是,Ubuntu 16.04默认的是开源版本的驱动,不支持GeForce GTX 1060,需要安装Nvidia的官方闭源驱动。我直接使用了Ubuntu的repo,命令"sudo apt-get install nvidia-375"就可以了。如果需要最新的驱动,也可以去Nvidia下载。用apt-get安装的另外一个好处是CUDA也会被一同安装。自己下载驱动的话需要安装CUDA。
CNTK官方文档给出了非常详细的安装过程,这里就不再重复。请参考CNTK的主页: CNTK。本文写作的时候,CNTK的版本是2.1(2017-07-31. CNTK 2.1)。
深度强化学习和DQN
目前我阅读到的,讲解深度强化学习最好的一篇文章来自Tambet Matiisen的DEMYSTIFYING DEEP REINFORCEMENT LEARNING。以下的内容基本上是对这篇文章的精简翻译(去掉少许内容并且加上我自己的理解)。
深度强化学习
2013年12月19日,DeepMind公司在Arxiv上发表了一篇论文:Playing Atari with Deep Reinforcement Learning。论文展示了他们如何使用强化学习,仅仅通过屏幕像素和分数作为奖赏,让电脑玩2600个雅达利的视频游戏。这个结果的意义在于,这些游戏和游戏要达到的目标都是不同的,并且是设计来挑战人类的。论文中提到的模型,不需要任何改变,就可以用来学习七个不同的游戏,并且在其中三个游戏中,模型的成绩比人类还好。这是迈向通用人工智能(强人工智能)的第一步:AI可以适应不同的环境,而不是限定于某个领域,例如玩象棋。发表了这个论文之后,DeepMind立刻就被Google收购了,并且一直引领了深度学习的研究。2015年2月,DeepMind又在自然杂志封面发表了论文Human-level control through deep reinforcement learning。在该论文中,DeepMind将同样的模型用到了49个游戏中,并且有半数取得了超人的成绩。
深度学习和强化学习的结合,无疑是近几年人工智能领域的热点。按照Yoshua Bengio的观点,目前的深度学习和所谓智能系统的表现,表明当前我们只做到了非常肤浅的部分,还远远没有触及智能的本源。我们必须去研究机器如何观察世界、理解世界,研究高层抽象,进行认知方面的探索。这个世界既包括真实世界,也可以是简单如视频游戏的虚拟环境。详见Andrew Ng对Bengio的访谈视频:Heroes of Deep Learning: Andrew Ng interviews Yoshua Bengio。后面我们也可以看到,用深度强化学习处理问题,更加的自然。
将深度学习和强化学习结合,有几个问题需要解决,后面的内容详细探讨这些问题:
- 强化学习的主要挑战:功劳分配问题(credit assignment problem),以及探索和开发困境(exploration-exploitation dilemma,也有翻译为探索和利用)。
- 如何用数学形式表示深度学习问题:MDP(马尔科夫决策过程,Markov Decision Process)。
- 如何形成长期策略:折扣的未来奖励(discounted future reward)。
- 如何估计和逼近未来奖励:Q-learning算法。
- 如何表示巨大的状态空间:深度神经网络。
- 如何稳定学习:经历重放技术(experience replay technique)。
强化学习
考虑Breakout这个打砖块游戏。假定我们要教一个神经网络玩这个游戏。网络的输入应该是屏幕图像,输出应该是三个动作:左,右和发射球。如下图:

我们可能想到的是,这个问题可以作为一个分类问题,每个游戏屏幕对应一个动作。但是这样我们就需要大量的训练样本。当然我们可以找高手来玩并且录制游戏,但是这样不是人类真正如何学习的。我们不需要别人上百万次的告诉我们,哪个屏幕应该如何应对。我们只需要偶尔有点反馈说我们做对了,然后我们自己就可以搞明白怎么玩了。
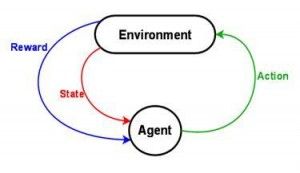
这就是强化学习要解决的问题。强化学习介于监督学习和非监督学习之间。监督学习需要每个训练数据都被标注,而非监督学习完全不需要标注。强化学习有稀疏的时延的标注,即奖励(Reward)。Agent从这些奖励中,学习如何与环境(Environment)互动。
这个概念是很直观的,但是在实践中有很多挑战。例如当我们击中了某个砖块并拿到了一个分数奖励,它通常跟刚刚拿到奖励之前的动作没有关系,所有需要的工作都已经完成了。这被称为功劳分配问题(credit assignment problem),例如,之前的哪些动作(actions)是获得奖励的原因,并且在多大程度上。
当使用某个策略得到了一些奖励,我们应该继续使用这个策略,还是应该尝试一些新的可能产生更好结果的策略?这被称为探索和开发困境(exploration-exploitation dilemma):我们应该继续开发并且最大化已知策略,还是应该探索可能的更好策略。
###马尔科夫决策过程(MDP)
如何表示一个强化学习问题,使得我们可以推演它呢?最通用的方法是MDP。假定有一个Agent,被至于一个环境中(例如Breakout游戏)。环境被至于一个确定的状态(挡板的位置,球的位置和方向,存在的砖块等等)。Agent在Environment中可以执行一些Action(例如移动挡板到左边或者右边)。这些Action可能产生Reward(例如分数增加)。Action使得Environment发生State迁移,Agent可以执行另外一个Action,如此往复。选择这些Action的规则被成为策略。Environment通常是随机的,意味着下一个State可能是随机的(例如,当我们损失了一个球,发射一个新的球,它会飞向一个随机的方向)。
State和Action的合集,加上从一个State转换到另一个State,以得到Reward的策略,构成了MDP。一段这个过程(例如一局游戏)组成了有限的State,Action和Reward的序列。
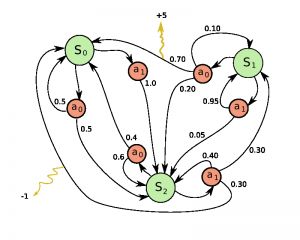
\\(s_0, a_0, r_1, s_1, a_1, r_2, s_2, …, s_{n-1}, a_{n-1}, r_n, s_n\\)
这里\\(s_i\\)代表State,\\(a_i\\)是Action,\\(r_{i+1}\\)是执行Action之后的Reward。这段序列结束于最终状态\\(s_n\\)(例如游戏结束屏幕)。马尔科夫决策过程依赖于马尔科夫假设,即下一个State \\(s_{i+1}\\)只依赖于当前State \\(s_i\\),与之前的State和Action无关。
折扣的未来奖励
为了能有好的长期结果,我们需要考虑的不仅仅是当前的Reward,并且还有将会得到的Reward。但是如何做到呢?
在一个马尔科夫过程中,我们可以很容易的计算一段序列的全部Reward:
\\(R=r_1+r_2+r_3+…+r_n\\)
同理,\\(t\\)之后所以的Reward,可以表示为:
\\(R_t=r_t+r_{t+1}+r_{t+2}+…+r_n\\)
但是因为环境是随机的,我们永远也没有办法保证,即使我们执行了相同的Action序列,我们还可以得到相同的Reward。序列进行的越远,分歧可能会越大。因此,通常都会使用折扣的未来奖励:
\\(R_t=r_t+\gamma r_{t+1}+\gamma^2 r_{t+2}…+\gamma^{n-t} r_n\\)
这里\\(\gamma\\)是折扣系数,取值在0和1之间:越远的Reward,我们越少考虑。容易看出,\\(t\\)之后的折扣的未来奖励,可以用\\(t_{+1}\\)表示:
\\(R_t=r_t+\gamma (r_{t+1}+\gamma (r_{t+2}+…))=r_t+\gamma R_{t+1}\\)
如果设置\\(\gamma=0\\),那么我们的策略是短视的,只依赖于当前的Reward。如果想平衡当前和将来Reward,一般设置\\(\gamma=0.9\\)。如果我们的环境是确定的,同样的Action序列总是得到相同的Reward,那么可以设置\\(\gamma=1\\)。
Agent的一个好的策略,是总去选择折扣的未来奖励最大的Action。
Q-learning算法
Q-learning算法中,定义了一个函数\\(Q(s,a)\\),表示在状态\\(s\\),采取动作\\(a\\)之后的折扣的未来奖励,然后在此基础上继续优化。
\\(Q(s_t,a_t)=max_{\pi} R_{t+1}\\)
对于\\(Q(s,a)\\),应该这样理解:在状态\\(s\\)采取动作\\(a\\)之后,游戏结束时能拿到的最好分数。它被称为\\(Q\\)函数(Q-function),因为它表示了在某个State下面,某个Action的质量。这听起来有点令人费解。我们知道当前的State和Action,但是不知道下面的State和Action,如何才能估计游戏结束时候的分数?我们确实不能。但是理论上,我们可以假定有这样一个函数。
那么这个函数应该是什么样子呢?假定在状态\\(s\\),要决定是采取动作\\(a\\)还是\\(b\\),我们想选择一个动作,使得游戏结束时候的分数最高。当使用Q-function时,答案就很简单:取Q-value最大的动作:
\\(\pi(s) =argmax_a Q(s,a)\\)
这里\\(\pi(s) \\)代表策略,即我们在每个State,选择Action的规则。
但是我们如何得到Q-function?让我们先看一下一个状态转移的情况:\\(
\\(Q(s,a)=r + \gamma max_{a’}Q(s’,a’)\\)
这个方程被称为贝尔曼方程:当前State和Action的最大的未来奖励,等于现在的奖励加上下一个状态的最大未来奖励。
Q-learning主要的思想是,我们可以用贝尔曼方程,迭代逼近Q-function。最简单的实现是把Q-function函数实现为一个表格(Q-table),State是行,Action是列。那么Q-learning算法的伪代码如下:
initialize Q[numstates,numactions] arbitrarily
observe initial state s
repeat
select and carry out an action a
observe reward r and new state s'
Q[s,a] = Q[s,a] + α(r + γmaxa' Q[s',a'] - Q[s,a])
s = s'
until terminated
即从初始状态\\(s\\)开始,从Q-table中遍历所以的行动\\(a\\),查看\\(a\\)对应的新状态\\(s’\\),用新状态\\(s’\\)最大的奖励\\(r\\),更新当前\\(Q[s,a]\\)。\\(α\\)是学习率。当学效率为1时,上面伪代码的等式,就完全和贝尔曼方程一样了。\\(maxa’ Q[s’,a’]\\)在初始阶段只是一个估计值,可能完全是错误的,但是随着迭代的进行,这个估计值会越来越精确。已经被证明,当迭代足够多次以后,\\(Q\\)函数会收敛,并且得到真实的值(Q-value)。
Deep Q Network(DQN)
上面的模型中,打砖块游戏的环境State,是由挡板的位置,球的位置和方向,还有每个砖块的位置定义的。但是这种直观的定义是游戏相关的(记得前面说过DeepMind只需要一个模型就可以玩49个游戏吗?)。那么我们能不能给出更加通用的,适合所有游戏的模型哪?一个明显的选择是用屏幕像素:隐含了所有的游戏状态,除了球的速度和方向,但是用两个连贯的屏幕就可以解决。
如果我们使用DeepMind论文中相同的预处理方法,截取四个最新的屏幕图像,将大小调整为84x84,并且转换成256级灰度,那么我们有\\(256^{84 \times 84 \times 4} \approx 10{67970}\\)个状态。相当于上面的Q-table有\\(10{67970}\\)行。这个数目实在是太大了,并且某些状态可能永远也不能被访问到。因此这个方法不可行。
这里就需要用到深度学习了。神经网络(NN)特别适合结构化数据的特征提取
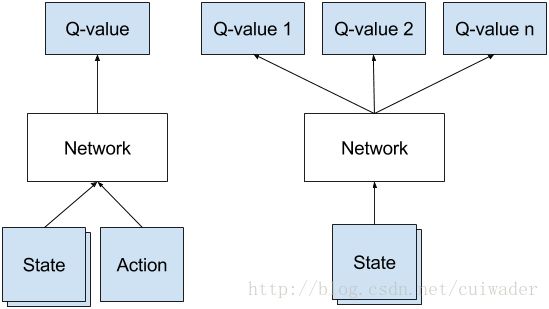
。我们可以用NN来表示Q-function,将state(四个游戏屏幕)和action作为输入,输出为相应的Q-value。我们也可以将一个游戏屏幕作为输入,输出为每个可能action的Q-value。后面这种方法更有优势,因为如果我们想更新Q-value,或者选择Q-value最大的action,我们只需要对网络前向传播一次,所有action的Q-value就都有了。下图是两种方法的区别:
DeepMind使用的网络结构如下:

这是一个包含了3个卷积层和两个连接层的CNN,不过没有池化层。这个也很好理解,因为池化层提供了平移不变性(translation invariance):网络对对象在图像中的位置不敏感。但是对于游戏来说,小球的位置对于我们决定reward是至关重要的!我们不能丢弃这个信息!
网络的输入是84x84灰度的游戏屏幕,输出是每个可能状态的Q-value,可以是实数。这是一个回归任务,可以用简单的平方误差损失作优化。
经历重放
现在我们可以在每个状态下面,使用CNN,逼近Q-function,并用Q-learning估算每个state的未来reward。但是实际上,用非线性函数去逼近Q-value不是很稳定。使Q-value收敛,有很多技巧,并且还需要很长的时间(在一个GPU上面,可能需要一周)。
一个最重要的技巧是经历重放。在玩游戏的过程中,所有经历过的\\(
探索和开发困境
Q-learning解决了功劳分配问题:倒流时光反向传播reward,直到到达真正引起reward的决策点(通过折扣的未来奖励)。现在来看看怎么解决探索和开发困境。
首先,Q-table或者Q-network是随机初始化的,随后初始的预测也是随机的。如果我们选择了最高的Q-value,那么这个选择也是随机的,相当于Agent在进行探索。当Q-function收敛的时候,它会返回稳定的Q-value,探索随之减少。所以我们可以认为,探索是Q-learning算法的一部分。但是这个探索是贪婪的:探索停止于找到的第一个可用策略。
ε-greedy exploration可以简单有效的修正这个问题。ε是随机选择一个Action的概率,否则用贪婪的办法选择Q-value最高的Action。即按照一定概率,选择随机的Action。
深度Q-learning算法
前面给出了基于Q-table的Q-learning算法的伪代码,现在看看带经历重放的深度Q-learning的算法:
initialize replay memory D
initialize action-value function Q with random weights
observe initial state s
repeat
select an action a
with probability ε select a random action
otherwise select a = argmaxa’Q(s,a’)
carry out action a
observe reward r and new state s’
store experience in replay memory D
sample random transitions from replay memory D
calculate target for each minibatch transition
if ss’ is terminal state then tt = rr
otherwise tt = rr + γmaxa’Q(ss’, aa’)
train the Q network using (tt - Q(ss, aa))^2 as loss
s = s'
until terminated
从伪代码可以看到,经历重放就是从重放内存中,随机采样,用采样的State的Q-value去训练网络。
除了这个算法,DeepMind还使用了很多其它的技巧,超出了本文的介绍范围。这个算法最神奇之处在于,它确实学习了。想想看,Q-function是随机初始化的。它一开始的输出都是垃圾,没有任何意义。我们把这个垃圾(下一个State的最大Q-value)作为网络的目标,偶尔加入一点Reward。听起来很愚蠢,它怎么能学到点有意义的东西呢?实际上,它学到了。
和最早的版本相比,Q-learning已经有了很大的发展,包括 Double Q-learning, Prioritized Experience Replay, Dueling Network Architecture和 extension to continuous action space等。不过请注意,深度Q-learning已经被Google申请了专利。
公式看的头晕,还是看看代码吧:CNTK与深度强化学习笔记之二: Cart Pole游戏示例