算法理解-粒子群算法(一个计算例子)
沿用上一篇中遗传算法的求解例子,其中代码参考游皓麟的R语言预测实战(这是一本好书):
求解函数
通过下面函数的求解,对粒子群算法进行学习:
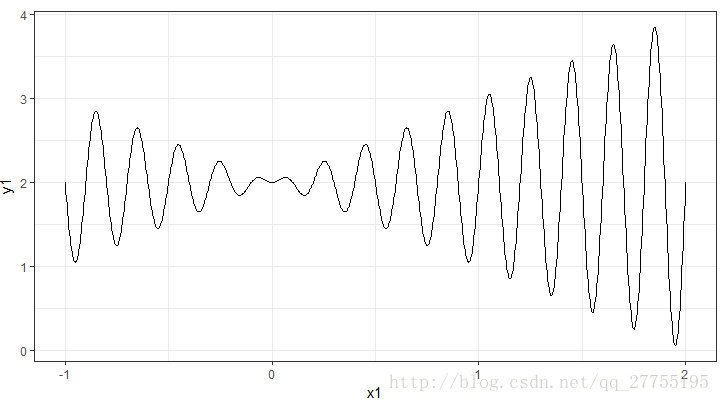
f(x)=x∗sin(10∗π∗x)+2x∈[−1,2]
其函数图像为:
求解流程与概念
原理
鸟(粒子)根据自身经验(自己经过的最高点)、以及所有鸟经验(所有粒子中的最高点)进行探索,每次飞的时间是1(迭代1次),速度是 v ,这一次飞过的路程 s=v∗1 (x的变化量),假如有奖励就过去,没有就停留在原地,再结合自身经验以及别人的经验思考,下一秒我要怎么飞比较好。
由于每次飞行时间是固定的,因此 位移=速度 ,所以只需要考虑该如何结合其他信息来确定下一秒我飞行的速度。其思考过程用数学公式进行表达则为:
vkid=w∗vk−1id (自身速度惯性)+c1∗r1∗(pbestid−xk−1id) (自身的历史经验)+c2∗r2∗(gbestd−xk−1id) (全部人的历史经验)
还是因为飞行的时间是固定为1的,下一秒我的位置则为:
xkid=xk−1id+vk−1id
从公式中可以看出,速度的更替由3个部分组成惯性,自身经验以及群体经验。在公式中下标 i 表示第 i 个粒子,下标 d 表示第 d 个维度,上标 k 表示当前时刻。则 vkid 表示当前时刻,第i个粒子,第d个维度的速度。其他参数含义:
| 参数 | 含义 |
|---|---|
| v | 速度 |
| w | 为惯性权重,用于记录当前自身的速度,通常为非负数,调节解空间的搜索范围,为0时则失去自身速度的记忆 |
| c1 | 表示加速度,调节学习的最大步长,当 c1 为0则不考虑自身经验,会导致丧失群体多样性,就是每个点都向当前最高点移动。 |
| c2 | 表示加速度,调节学习的最大步长、解的搜索空间,当 c2 为0则不考虑其他人的经验,没有信息共享,会导致收敛变慢。 |
| pbest | 自身历史经验中的适应度最高的位置信息 |
| gbest | 所有粒子历史经验中适应度最高的位置信息 |
算法流程
1.调节参数以及生成初始粒子群
# 1. 定义求解函数
sloveFun <- function(x){
x*sin(10*pi * x) + 2
}
#2. 初始化粒子群
limitX <- c(-1, 2) # x限制范围
vmax <- 0.15 * (limitX[2] - limitX[1]) # 速度变化范围为x定义域的15%
particleNum <- 20 # 粒子个数
pbest <- NULL
gbest <- NULL
gbestAdd <- NULL
w <- 1 # 设置惯性权重
c1 <- c2 <- 2 # 设置加速度常数
iters <- 10000 # 设置最大迭代次数
alpha <- 0.0002 # 设置最佳适应度值的增值阈值
#-- 在给定定义域内,随机生成位置矩阵
xMat <- matrix(c(x = runif(particleNum, limitX[1], limitX[2])), dimnames = list(NULL, c("x")))
# x
# [1,] 1.0536155
# [2,] -0.9237345
# [3,] -0.1517228
# [4,] -0.6818320
# [5,] 1.7338915
#-- 在给定定义域内,随机生成速度矩阵
vMat <- matrix(c(x = runif(particleNum, -vmax, vmax)), dimnames = list(NULL, c("x")))
# x
# [1,] -0.43600456
# [2,] 0.17513843
# [3,] -0.03273836
# [4,] -0.24263868
# [5,] -0.010396822.计算适应度并初始化pbest\gbest
#3. 计算种群中所有粒子适应度
adjusts <- apply(xMat, 1, sloveFun)
#[1] 3.0468264 1.3732987 1.8484994 2.3683774 0.4834344
#4. 更新迭代pbest\gbest,同时更新所有粒子的位置与速度
pbest <- cbind(xMat, adjusts)
# x adjusts
# [1,] 1.0536155 3.0468264
# [2,] -0.9237345 1.3732987
# [3,] -0.1517228 1.8484994
# [4,] -0.6818320 2.3683774
# [5,] 1.7338915 0.4834344
idxAdjusts <- ncol(pbest)
gbest <- pbest[which.max(pbest[, idxAdjusts]),]
# x adjusts
# 1.439921 3.3683393.迭代更新
for (i in 1:iters){
#4.1 更新pbest
# ---如果当前位置比之前的位置更适应则替换之前信息
mapply(function(no, adj){
if(adj > pbest[no, idxAdjusts]){
pbest[no, ] <<- c(xMat[no, ], adj)
}
}, 1:length(adjusts), adjusts)
#4.2 更新gbest
if (max(pbest[, idxAdjusts]) > gbest[idxAdjusts]) {
gbestAdd <- max(pbest[, idxAdjusts]) - gbest[idxAdjusts]
gbest <- pbest[which.max(pbest[, idxAdjusts]), ]
print("--更新gbest")
print(gbestAdd)
}
#4.3 更新所有粒子的位置与速度
xMatOld <- xMat
xMat <- xMat + vMat
vMat <- w*vMat + # 惯性
c1 * runif(1, 0, 1) * (pbest[, 1:(idxAdjusts - 1), drop=F] - xMatOld) + # 自身经验,向自身最优值靠近
c2 * runif(1, 0, 1) * (matrix(rep(gbest[1:(idxAdjusts - 1)], particleNum), ncol = idxAdjusts - 1 , byrow = T)-xMatOld) # 最优值信息共享
#4.4 超界修正
#---如果vMat有值超过边界值,则设定为边界值
vMat[which(vMat < (-vmax))] <- (-vmax)
vMat[which(vMat > (vmax))] <- (vmax)
#---如果xMat有值超过边界值,则设为边界值
xMat[which(xMat < (limitX[1]))] <- (limitX[1])
xMat[which(xMat > (limitX[2]))] <- (limitX[2])
#4.5 计算更新候选的种群适应度
adjusts <- apply(xMat, 1, sloveFun)
#4.6 检查全局适应度增量,如果小于最佳适应度值的增值阈值,则算法停止
if (!is.null(gbestAdd) && gbestAdd < alpha) {
cat("k =", i, "算法结束!")
cat("\n", "最终结果为:", gbest)
break()
}
}求解结果
相比于遗传算法的测试,PSO在收敛次数上更加不稳定,收敛次数波动较大,少则低于10,多则成百上千。
选取了一个次数较少的,方便动态展示。
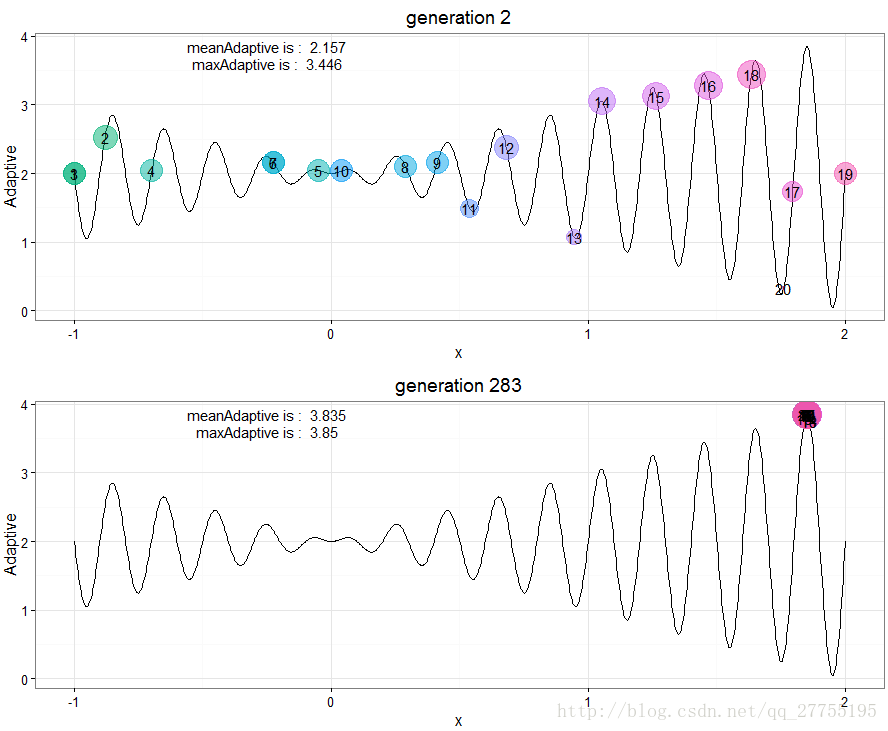
动态过程,无聊的话看着也是挺好玩的:
与遗传算法的对比
粒子群算法相比于遗传算法更加的简单易懂,其调节参数较少
不同点:
- PSO由于不需要编码,没有GA算法中由于编码带来的求解精度限制
- 在GA算法中,染色体之间共享信息,所以整个种群的移动是比较均匀地向最优区域移动。PSO中的粒子通过当前搜索到最优点进行共享信息,很大程度上这是一种单项信息共享机制,整个搜索更新过程是跟随当前最优解的过程。在大多数情况下,所有粒子可能比遗传算法中的进化个体以更快速度收敛于最优解。
相似点:
- 它们都是仿生算法,求解过程中存在多个解,因此都可以进行并行运算
- 个体的适配信息进行搜索,因此不受函数约束条件的限制,如连续性、可导性等。
所有代码
# 1. 定义求解函数
sloveFun <- function(x){
x*sin(10*pi * x) + 2
}
#2. 初始化粒子群
limitX <- c(-1, 2)
vmax <- 0.15 * (limitX[2] - limitX[1]) # 速度变化范围为x定义域的15%
particleNum <- 20
pbest <- NULL
gbest <- NULL
gbestAdd <- NULL
w <- 1 # 设置惯性权重
c1 <- c2 <- 2 # 设置加速度常数
iters <- 10000 # 设置最大迭代次数
alpha <- 0.0002 # 设置最佳适应度值的增值阈值
#-- 在给定定义域内,随机生成位置矩阵
xMat <- matrix(c(x = runif(particleNum, limitX[1], limitX[2])), dimnames = list(NULL, c("x")))
#-- 在给定定义域内,随机生成速度矩阵
vMat <- matrix(c(x = runif(particleNum, -vmax, vmax)), dimnames = list(NULL, c("x")))
#3. 计算种群中所有粒子适应度
adjusts <- apply(xMat, 1, sloveFun)
#4. 更新迭代pbest\gbest,同时更新所有粒子的位置与速度
pbest <- cbind(xMat, adjusts)
idxAdjusts <- ncol(pbest)
gbest <- pbest[which.max(pbest[, idxAdjusts]),]
for (i in 1:iters){
#4.1 更新pbest
#遍历adjusts,如果对应粒子适应度是历史最好的,则完成替代
mapply(function(no, adj){
if(adj > pbest[no, idxAdjusts]){
pbest[no, ] <<- c(xMat[no, ], adj)
}
}, 1:length(adjusts), adjusts)
#4.2 更新gbest
if (max(pbest[, idxAdjusts]) > gbest[idxAdjusts]) {
gbestAdd <- max(pbest[, idxAdjusts]) - gbest[idxAdjusts]
gbest <- pbest[which.max(pbest[, idxAdjusts]), ]
print("--更新gbest")
print(gbestAdd)
}
#4.3 更新所有粒子的位置与速度
xMatOld <- xMat
xMat <- xMat + vMat
vMat <- w*vMat + # 惯性
c1 * runif(1, 0, 1) * (pbest[, 1:(idxAdjusts - 1), drop=F] - xMatOld) + # 自身经验,向自身最优值靠近
c2 * runif(1, 0, 1) * (matrix(rep(gbest[1:(idxAdjusts - 1)], particleNum), ncol = idxAdjusts - 1 , byrow = T)-xMatOld) # 最优值信息共享
#4.4 超界处理
#---如果vMat有值超过边界值,则设定为边界值
vMat[which(vMat < (-vmax))] <- (-vmax)
vMat[which(vMat > (vmax))] <- (vmax)
#---如果xMat有值超过边界值,则设为边界值
xMat[which(xMat < (limitX[1]))] <- (limitX[1])
#4.5 计算更新侯的种群适应度
adjusts <- apply(xMat, 1, sloveFun)
#4.6 检查全局适应度增量,如果小于最佳适应度值的增值阈值,则算法停止
if (!is.null(gbestAdd) && gbestAdd < alpha) {
cat("k =", i, "算法结束!")
cat("\n", "最终结果为:", gbest)
break()
}
}其他求解方法
遗传算法:http://blog.csdn.net/qq_27755195/article/details/56597467
模拟退火:http://blog.csdn.net/qq_27755195/article/details/62505046