最小生成树问题(Minimum Spanning Trees, MST)
最小生成树问题(Minimum Spanning Trees, MST)
作者:Bluemapleman([email protected])
麻烦不吝star和fork本博文对应的github上的技术博客项目吧!谢谢大家的支持!
知识无价,写作辛苦,欢迎转载,但请注明出处,谢谢!
文章目录
- 最小生成树问题(Minimum Spanning Trees, MST)
- 问题定义
- 生成MST的方法
- Kruskal
- Prim
- 参考文献
问题定义
给定一个无向图G=(V, E),以及边(Edge)上的权值w: E -> R。
在G中找到一棵生成树 T ⊆ E T\subseteq E T⊆E,这棵树连接了所有的顶点,且其所有边的权值的总和是所有这样的生成树中最小的。
生成MST的方法
生成MST的两个经典算法Kruskal和Prim算法都是基于贪心的思想,只是它们应用贪心的方式不太一样。但是它们都遵循一个一般性方法(Generic Method),这个一般性方法每次为MST找一个边。这个一般性方法会维持一个边的集合A,并保持以下迭代不变性质(loop invariant):
每次迭代之后, A是某个MST的边子集。
每一次迭代过程中,我们确定一个可以加到A中,且不违反迭代不变性质的边(u,v);也就是说, A ⋃ ( u , v ) A\bigcup {(u,v)} A⋃(u,v)也是MST的一个子集,我们叫这样的边为安全边(safe edge),因为我们可以在保持迭代不变性质的前提下,把这个边安全地加入到A中。
而找安全边,有以下一个定理可以让我们参考,
G=(V, E)是一个连通的无向图,且它的每个边都有一个相应的权值。A是边的集合E的一个子集,它是G的最小生成树的一个部分。让(S,V-S)称为G的一个划分,若有一条权值最小的边(u,v)横跨划分的两个部分,那么这个边就是一个安全边。
具体证明可参照[1]的23.1节,此处不展开。
而实际的Kruskal与Prim算法的具体差异,实际上就体现在找安全边的思路上。
Kruskal
Kruskal的本质是并查集(Union Find)的应用,而并查集的知识可以参考这篇文章并查集(Union-Find)算法介绍。
- 伪代码

第2、3行:Kruskal首先构造并查集的初始集合,即让每个顶点都的父亲指针都指向自己。
第4行:对G中的所有边按照权值从小到大进行排序。
第5、6、7行:按照权值从小到大顺序遍历每个边,如果当前边的两个顶点不属于同一个集合,则将它们连接起来。
- 示例(来自[1]的23.3节)

-
时间复杂度
- 对边按照权值排序: O(ElgE)
- 联合与查找:O(ElgV)
总时长:O(ElgV) (因为 V − 1 ≤ E ≤ C n 2 ≤ V 2 V-1\le E \le C_n^2 \le V^2 V−1≤E≤Cn2≤V2,所以lgE=O(lgV),所以O(E(lgE+lgV)=O(ElgV))
Prim
Prim算法则利用一个优先队列(Priority Queue)来存储所有尚未加入到生成树T中的G的顶点,顶点的优先级由连接T与该顶点的权重最小的边的权重决定。
- 伪代码
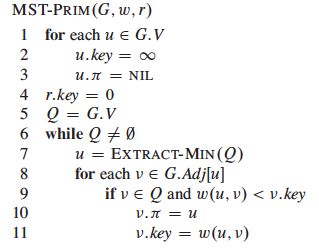
第1、2、3行:初始化G中所有除T的起始点之外其它顶点的键值(即优先队列中的优先级)。并将结点的父亲指向空。
第6、7行:开始循环,直到优先队列为空,每次循环都从Q中取出优先级最低的那个顶点。
第8、9、10、11行:遍历提取出的顶点的每个相邻边,看该相邻边的权值是否小于边的另一个顶点的键值,若小于,则更新键值为边的权值,并将父亲指针指向提取出的顶点。
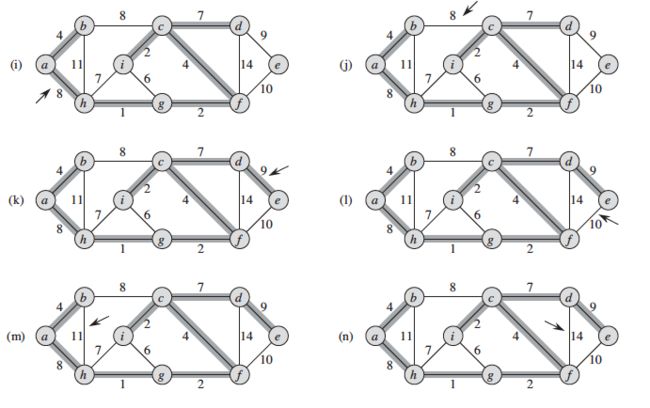
- 示例(来自[1]的23.3节)

- 时间复杂度
优先队列操作:
insert(v):V次
extractMin():V次
decreaseKey(v):E次
假设我们用一个二叉堆来实现优先队列,那么extractMin()与decreaseKey(v)都将是O(lgV)的复杂度。
总时间:
O(VlgV+ElgV)=O(ElgV) (与Kruskal一样)
- *扩展
如果用斐波那契堆(Fibonacci Heap,参考[1]第19章)来实现优先队列,可以实现均摊insert(v)与decreasekey()操作O(1)的时间复杂度。
此时,Prim算法的总的时间复杂度变成了:O(VlgV+E),比基于二叉堆优先队列实现的Prim性能更好。
参考文献
[1] Introduction to Algorithm: Third Edition, Thomas et al.