频域分析之稳定裕度
本文承接上篇博客奈奎斯特稳定性判据的推导
我们来看频域分析中的非常重要的概念:稳定裕度
首先来看稳定裕度的定义:若 Z = P − 2 N = 0 Z=P-2 N=0 Z=P−2N=0(其中 P = 0 P=0 P=0),则奈奎斯特曲线 G ( j w ) H ( j w ) G(jw)H(jw) G(jw)H(jw)过 ( − 1 , j 0 ) (-1,j0) (−1,j0)点时,系统临界稳定,相频和幅频同时满足条件:
{ A ( ω ) = 1 φ ( ω ) = ( 2 k + 1 ) π k = 0 , ± 1 , ± 2 , ⋯ \left\{\begin{array}{l}{A(\omega)=1} \\ {\varphi(\omega)=(2 k+1) \pi \quad k=0, \pm 1, \pm 2, \cdots}\end{array}\right. {A(ω)=1φ(ω)=(2k+1)πk=0,±1,±2,⋯
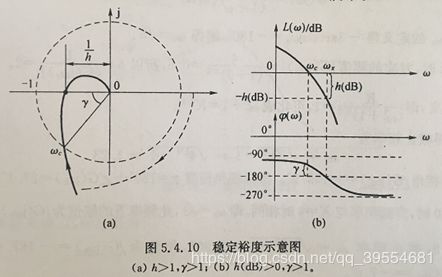
系统远离平衡点的程度,即可用稳定裕度来表示,如下图所示:
Q:为什么穿越 ( − 1 , j 0 ) (-1,j0) (−1,j0)点时为临界状态?
A:可以看出,在稳定裕度的定义中假定了 P = 0 P=0 P=0,即系统的开环正极点数为0,由奈奎斯特稳定性判据,系统的闭环正极点数为 Z = 2 N Z=2N Z=2N,奈奎斯特曲线逆时针包围 ( − 1 , j 0 ) (-1,j0) (−1,j0)点的圈数(沿相角增大方向穿越 ( − 1 , j 0 ) (-1,j0) (−1,j0)左半实轴次数)即为闭环正极点数,我们自然想到,若系统奈奎斯特曲线均在 ( − 1 , j 0 ) (-1,j0) (−1,j0)点右侧,那么就不存对 ( − 1 , j 0 ) (-1,j0) (−1,j0)左半实轴的穿越,闭环系统也就没有正极点了,所以 ( − 1 , j 0 ) (-1,j0) (−1,j0)点是系统稳定的临界点,稳定裕度刻画了系统从稳定状态变化到不稳定状态时幅值和相角的”变化程度”;
注意:稳定裕度只对最小相位系统适用,因为在稳定裕度的定义中假定了系统没有开环正极点(这里稍微有些疑惑,最小相位系统是指在 s s s右半平面既无零点也无极点的系统,而此处只说明了系统开环传递函数没有正极点)
相角裕度 γ \gamma γ
系统截止频率 w c w_c wc处,幅值满足条件 A ( ω c ) = ∣ G ( j ω c ) H ( j ω c ) ∣ = 1 A\left(\omega_{c}\right)=\left|G\left(j\omega_{c}\right) H\left(j \omega_{c}\right)\right|=1 A(ωc)=∣G(jωc)H(jωc)∣=1时,若其相角再减小 γ \gamma γ后,将达到临界稳定条件(穿过 ( − 1 , j 0 ) (-1,j0) (−1,j0)点),即:
∠ G ( j ω c ) H ( j ω c ) − γ = − 18 0 ∘ \angle {G\left(j \omega_{c}\right) H\left(j \omega_{c}\right)}-\gamma=-180^{\circ} ∠G(jωc)H(jωc)−γ=−180∘
所以:
γ = 18 0 ∘ + ∠ G ( j ω r ) H ( j ω c ) \gamma=180^{\circ}+\angle {G\left(j \omega_{r}\right) H\left(j \omega_{c}\right)} γ=180∘+∠G(jωr)H(jωc)
称为相角裕度。
当 γ > 0 \gamma >0 γ>0时,系统稳定;当 γ = 0 \gamma=0 γ=0时,系统临界稳定;当 γ < 0 \gamma <0 γ<0时,系统不稳定。
幅值裕度 h h h
设系统的穿越频率为 w x w_x wx, w x w_x wx满足相角条件
φ ( ω x ) = ∠ G ( j ω x ) H ( j ω x ) = ( 2 k + 1 ) π , k = 0 , ± 1 , ± 2 , … \varphi\left(\omega_{x}\right)=\angle G\left(j \omega_{x}\right) H\left(j \omega_{x}\right)=(2 k+1) \pi, k=0, \pm 1,\pm 2,… φ(ωx)=∠G(jωx)H(jωx)=(2k+1)π,k=0,±1,±2,…
若幅值再增大 h h h倍后,系统达到临界稳定条件,即:
h ∣ G ( j ω x ) H ( j ω x ) ∣ = 1 h\left|G\left(j \omega_{x}\right) H\left(j \omega_{x}\right)\right|=1 h∣G(jωx)H(jωx)∣=1
可得:
h = 1 ∣ G ( j ω x ) H ( j ω x ) ∣ h=\frac{1}{\left|G\left(j \omega_{x}\right) H\left(j \omega_{x}\right)\right|} h=∣G(jωx)H(jωx)∣1
若在对数坐标系下,则:
h ( d B ) = − 20 lg ∣ G ( j ω x ) H ( j ω x ) ∣ h(\mathrm{dB})=-20 \lg \left|G\left(j \omega_{x}\right) H\left(j \omega_{x}\right)\right| h(dB)=−20lg∣G(jωx)H(jωx)∣
h h h称为幅值裕度。
当 h > 1 h>1 h>1或者 h > 0 d B h>0dB h>0dB时,系统稳定;当 h = 1 h=1 h=1或者 h = 0 d B h=0dB h=0dB时,系统临界稳定;当 h < 1 h<1 h<1或者 h < 0 d B h<0dB h<0dB时,系统不稳定。