Python 实现走迷宫深度优先回溯算法(优质代码)
题目:迷宫如下
#地图:0是可走的地方,1是障碍物
maze=np.array([
[0,0,0,0,0],
[0,1,0,1,0],
[0,1,1,0,0],
[0,1,1,0,0],
[0,0,0,0,0]
])
入口和出口:
startP=Point(0,0)#起点坐标
endP=Point(4,4)#终点坐标
没有传送门
准备:导入Numpy:
import numpy as np
第一步:定义坐标
'''
类:Point
用来标识坐标点
'''
class Point(object):
def __init__(self,x,y):
self.row=x
self.col=y
第二步:定义工具函数
'''
函数:判断两个点是否相同
参数:
Point p1
Point p2
'''
def isSamePoint(p1,p2):
if (p1.row==p2.row)and(p1.col==p2.col):
return True
else:
return False
'''
函数:获取相邻未被访问的节点(上下左右)
参数说明:
mark:节点标记
point:节点
m:行
n:列
'''
def getAdjacentNotVisitedNode(mark,point,m,n):
resP=Point(-1,-1)
if (point.row-1>=0)and(mark[point.row-1][point.col]==0):
resP.row=point.row-1
rep.col=point.col
return resP
if (point.col+1<n)and(mark[point.row][point.col+1]==0):
resP.row=point.row
resP.col=point.col+1
return resP
if(point.row+1<m)and(mark[point.row+1][point.col]==0):
resP.row=point.row+1
resP.col=point.col
return resP
if(point.col-1>=0)and(mark[point.row][point.col-1]==0):
resP.row=point.row
resP.col=point.col-1
return resP
return resP
第三步:写深度优先的寻路函数
'''
函数:寻路函数
参数:
maze:地图
m:行
n:列
pointStack:点栈,用于存放路径
'''
def mazePath(maze,m,n,startP,endP,pointStack):
if(maze[startP.row][startP.col]==1)or(maze[endP.row][endP.col]==1):
return
#
mark=maze
#将起点入栈
pointStack.append(startP)
mark[startP.row][startP.col]=0
#栈不空并且栈顶元素不为结束节点
ptop=pointStack[-1]
while (len(pointStack)!=0)and(isSamePoint(ptop,endP)==False):
ptop=pointStack[-1]
adjacentNotVisitedNode=getAdjacentNotVisitedNode(mark,ptop,m,n)
if adjacentNotVisitedNode.row==-1:
pointStack.pop()
continue
mark[adjacentNotVisitedNode.row][adjacentNotVisitedNode.col]=1
pointStack.append(adjacentNotVisitedNode)
第四步:主函数
def main():
#地图:0是可走的地方,1是障碍物
maze=np.array([
[0,0,0,0,0],
[0,1,0,1,0],
[0,1,1,0,0],
[0,1,1,0,0],
[0,0,0,0,0]
])
startP=Point(0,0)#起点坐标
endP=Point(4,4)#终点坐标
pointStack=[]#设置点栈
mazePath(maze,5,5,startP,endP,pointStack)#执行寻路函数
if len(pointStack)==0:
print('Died.....No way can go')
else:
tmpStack=[]
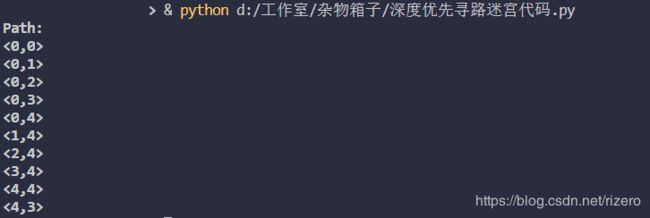
print('Path:')
while len(pointStack)>0:
tmpStack.append(pointStack[-1])
pointStack.pop()
while len(tmpStack)>0:
p=tmpStack.pop()
print('<{},{}>'.format(p.row,p.col))
if __name__ == "__main__":
main()
代码汇总:
import numpy as np
'''
类:Point
用来标识坐标点
'''
class Point(object):
def __init__(self,x,y):
self.row=x
self.col=y
'''
函数:判断两个点是否相同
参数:
Point p1
Point p2
'''
def isSamePoint(p1,p2):
if (p1.row==p2.row)and(p1.col==p2.col):
return True
else:
return False
'''
函数:获取相邻未被访问的节点(上下左右)
参数说明:
mark:节点标记
point:节点
m:行
n:列
'''
def getAdjacentNotVisitedNode(mark,point,m,n):
resP=Point(-1,-1)
if (point.row-1>=0)and(mark[point.row-1][point.col]==0):
resP.row=point.row-1
rep.col=point.col
return resP
if (point.col+1<n)and(mark[point.row][point.col+1]==0):
resP.row=point.row
resP.col=point.col+1
return resP
if(point.row+1<m)and(mark[point.row+1][point.col]==0):
resP.row=point.row+1
resP.col=point.col
return resP
if(point.col-1>=0)and(mark[point.row][point.col-1]==0):
resP.row=point.row
resP.col=point.col-1
return resP
return resP
'''
函数:寻路函数
参数:
maze:地图
m:行
n:列
pointStack:点栈,用于存放路径
'''
def mazePath(maze,m,n,startP,endP,pointStack):
if(maze[startP.row][startP.col]==1)or(maze[endP.row][endP.col]==1):
return
#
mark=maze
#将起点入栈
pointStack.append(startP)
mark[startP.row][startP.col]=0
#栈不空并且栈顶元素不为结束节点
ptop=pointStack[-1]
while (len(pointStack)!=0)and(isSamePoint(ptop,endP)==False):
ptop=pointStack[-1]
adjacentNotVisitedNode=getAdjacentNotVisitedNode(mark,ptop,m,n)
if adjacentNotVisitedNode.row==-1:
pointStack.pop()
continue
mark[adjacentNotVisitedNode.row][adjacentNotVisitedNode.col]=1
pointStack.append(adjacentNotVisitedNode)
def main():
#地图:0是可走的地方,1是障碍物
maze=np.array([
[0,0,0,0,0],
[0,1,0,1,0],
[0,1,1,0,0],
[0,1,1,0,0],
[0,0,0,0,0]
])
startP=Point(0,0)#起点坐标
endP=Point(4,4)#终点坐标
pointStack=[]#设置点栈
mazePath(maze,5,5,startP,endP,pointStack)#执行寻路函数
if len(pointStack)==0:
print('Died.....No way can go')
else:
tmpStack=[]
print('Path:')
while len(pointStack)>0:
tmpStack.append(pointStack[-1])
pointStack.pop()
while len(tmpStack)>0:
p=tmpStack.pop()
print('<{},{}>'.format(p.row,p.col))
if __name__ == "__main__":
main()
输出寻路路径的点坐标: