由磁场数据和加速度数据计算初始姿态角
前言
一般惯导姿态角的初始值是由加速度数据和磁场数据计算得到的,加速度数据计算得到滚转角和俯仰角,由滚转角,俯仰角以及磁场数据经过计算再得到初始的偏航角。下面是具体的计算和推导过程。
计算过程:
1.计算滚转角和俯仰角
这里我们的导航坐标系为东北天坐标系(ENU),载体坐标系为右、前,上(x,y,z),姿态角的旋转顺序为:z,x,y(偏航、俯仰,滚转)。
对于加速度计,有以下公式:

![]() 表示导航系到载体系的转换矩阵。设偏航、俯仰,滚转的初始值分别为z0 ,y0 , x0 。
表示导航系到载体系的转换矩阵。设偏航、俯仰,滚转的初始值分别为z0 ,y0 , x0 。

并且满足: 
经过计算得到:
所以:
在推导过程中纯手推容易出错,可以借助matlab计算矩阵,这样不易出错,我在推导这部分时也使用matlab来计算。代码如下:
syms x0
syms y0
syms z0
syms g
x_r_matrix=[1,0,0;0,cos(x0),-sin(x0);0,sin(x0),cos(x0)];
y_r_matrix=[cos(y0),0,sin(y0);0,1,0;-sin(y0),0,cos(y0)];
z_r_matrix=[cos(z0),-sin(z0),0;sin(z0),cos(z0),0;0,0,1];
Cn_b = z_r_matrix*x_r_matrix*y_r_matrix;
Cb_n = Cn_b';
g_n=[0;0;g];
g_b=Cb_n*g_n;
2.计算偏航角
这块可以想象一下,假设一开始平稳放置磁力计,则偏航角的计算公式如下:
![]()
该平稳状态设定为a状态,即俯仰角和滚转都为0,对于磁力计放置的任意状态,有以下公式:


根据上式求出![]() 和
和![]() 之后,再根据
之后,再根据![]() 公式就可求出偏航角。
公式就可求出偏航角。
Matlab推导代码如下:
syms x0
syms y0
syms z0
syms mgbx
syms mgby
syms mgbz
x_r_matrix=[1,0,0;0,cos(x0),-sin(x0);0,sin(x0),cos(x0)];
y_r_matrix=[cos(y0),0,sin(y0);0,1,0;-sin(y0),0,cos(y0)];
z_r_matrix=[1,0,0;0,1,0;0,0,1];
Cn_b = z_r_matrix*x_r_matrix*y_r_matrix; m_b=[mgbx;mgby;mgbz];
m_n = Cn_b*m_b;
实际验证
我这里验证使用的IMU型号为ADI公司的ADIS16470,其载体坐标系的定义如下图所示:

和上文提到的载体坐标系是一致的,右,前,上代表载体坐标系的x,y,z轴,软件界面如下图所示:
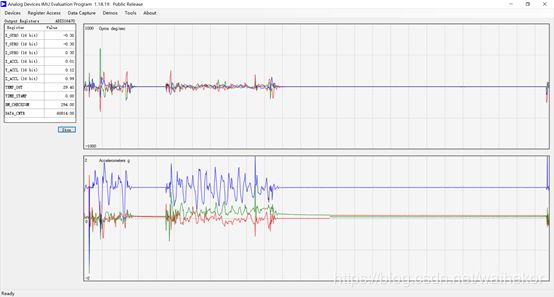
具体的验证过程很简单,这里不再详叙,不同IMU的载体坐标系定义是不一样的,这点在使用时要注意。当逆时针绕y轴旋转,x轴数据为负, z轴向数据为正;当顺时针绕y轴旋转,x轴向数据为正,z轴数据为正;当逆时针绕x轴旋转,y轴数据为正,z轴数据为正;当顺时针绕x轴旋转,y轴数据为负,z轴数据为正。和前面公式计算得到的角度的正负号验证是一致的。
参考文献
- Euler angles, quaternions, and transformation matrices for space shuttle analysis
- A Double Stage Kalman Filter for Orientation Tracking With an Integrated Processor in 9D IMU