gitchat训练营15天共度深度学习入门课程笔记(五)
第4章 神经网络的学习
- 4.1 从数据中学习
- 4.1.1 数据驱动
- 4.1.2 训练数据和测试数据
- 4.2 损失函数
- 4.2.1 均方误差
- 4.2.2 交叉熵误差
- 4.2.3 mini-batch 学习
- 4.2.4 mini-batch 版交叉熵误差的实现
- 4.2.5 为何要设定损失函数
- 学习的目的在于寻找损失函数最小的权重参数
4.1 从数据中学习
- 感知机收敛定理可以在有限次学习中使感知机解决线性可分问题
4.1.1 数据驱动
- 如何识别
5
- 从图像中提取特征量(将输入图像提取最重要数据的转换器,来转换为向量形式,如:
SIFT、SURF、HOG),再通过分类器(SVM、KNN等)学习。 - 机器学习中,人工设置图像特征量
- 深度学习(端到端机器学习)中,特征量都是机器学习的,即输入量直接可以作为原始数据

4.1.2 训练数据和测试数据
- 训练数据也称为
监督数据(监督着学习过程的数据) - 为了正确评价模型的泛化能力,所以要划分数据(必须要有大量没有见过的数据)
泛化能力指处理没见过的数据的能力- 只对一个数据集过度拟合的问题叫做
过拟合
4.2 损失函数
损失函数表示性能在多大程度上不拟合,即恶劣程度
用损失函数的负数表示性能在多大程度上拟合,即优良程度
- 损失函数可以使用任意函数,一般用
均方误差和交叉熵误差等。
4.2.1 均方误差
公式如下:
E = 1 2 ∑ k ( y k − t k ) 2 E=\frac{1}{2}\sum_{k}(y_k-t_k)^2 E=21k∑(yk−tk)2
- y k y_k yk表示神经网络的输出
- t k t_k tk表示监督数据
- k k k表示数据维度
python实现如下:
def mean_squared_error(y,t):
return 0.5*np.sum((y-t)**2)
例子如下:
import numpy as np
def mean_squared_error(y,t):
return 0.5*np.sum((y-t)**2)
t=np.array([0, 0, 1, 0, 0, 0, 0, 0, 0, 0])
y=np.array([0.1, 0.05, 0.6, 0.0, 0.05, 0.1, 0.0, 0.1, 0.0, 0.0])
print(mean_squared_error(y,t))
y=np.array([0.1, 0.05, 0.1, 0.0, 0.05, 0.1, 0.0, 0.6, 0.0, 0.0])
print(mean_squared_error(y,t))
- y是softmax函数的输出,所以表示概率。
- t是已知正误的监督数据,用one-hot来表示数据集,标签表示2是正确的。
- 此处神经网络输出概率最大的是2
运行结果如下:
0.09750000000000003
0.5975
可以知道,对于神经网络模型得到输出概率最高与监督数据不符时,损失函数的结果会增大,表示恶劣程度较高
4.2.2 交叉熵误差
公式如下:
E = − ∑ k t k ln y k E=-\sum_{k}t_k\ln{y_k} E=−k∑tklnyk
- 只计算正确解标签所对应的自然函数的负数
− ln x -\ln{x} −lnx对应的函数图像如下:

而 0 ≤ y k ≤ 1 0\leq{yk}\leq1 0≤yk≤1
所以输出的概率越小损失函数越大,和监督数据越不吻合。
python实现如下:
def cross_entropy_error(y,t):
delta=1e-7 #delta用来防止log(0)=infinity的出现
return -np.sum(t*np.log(y+delta))
同样按照均方误差的例子来调用,得到的运行结果如下:
0.510825457099338
2.302584092994546
4.2.3 mini-batch 学习
之前我们将一个数据条的损失函数讨论了,如果有N个数据,每个数据有分别有很多需要对比的元素,则交叉熵误差公式如下:
E = − 1 N ∑ N ∑ k t n k ln y n k E=-\frac{1}{N}\sum_{N}\sum_{k}t_{nk}\ln{y_{nk}} E=−N1N∑k∑tnklnynk
- t n k t_{nk} tnk是第N个数据的第k个元素的监督数据
- y n k y_{nk} ynk是第N个数据的第k个元素的输出
- 除以 N 进行正规化,还可以求每个数据的平均损失函数
如果数据量特别大时,求和会是一件很耗时的工作,所以这时候只用一部份,作为全部数据的“近似”,称为小批量(mini-batch),如用60000个数据取100个学习,称为 mini-batch 学习。
这时我们回忆上一章读入mnist数据集的情况:
- 读入MNIST 数据后,训练数据有
60000个,输入数据是784维(28 × 28)的图像数据,监督数据是10维的数据。因此,上面的x_train、t_train的形状分别是(60000, 784)和(60000, 10)。
在其中随机抽取10个数据用np.random.choice(train_size, batch_size)代码:
train_size = x_train.shape[0] #训练数据第0维数值,代表有多少个数据
batch_size = 10 #要选出多少数据
batch_mask = np.random.choice(train_size, batch_size) #选出的数据位置放入batch_mask
x_batch = x_train[batch_mask] #把这些位置上的输入数据取出来放入x_batch作为mini—batch学习的输入数据
t_batch = t_train[batch_mask] #把这些位置上的监督数据取出来放入t_batch作为mini—batch学习的监督数据
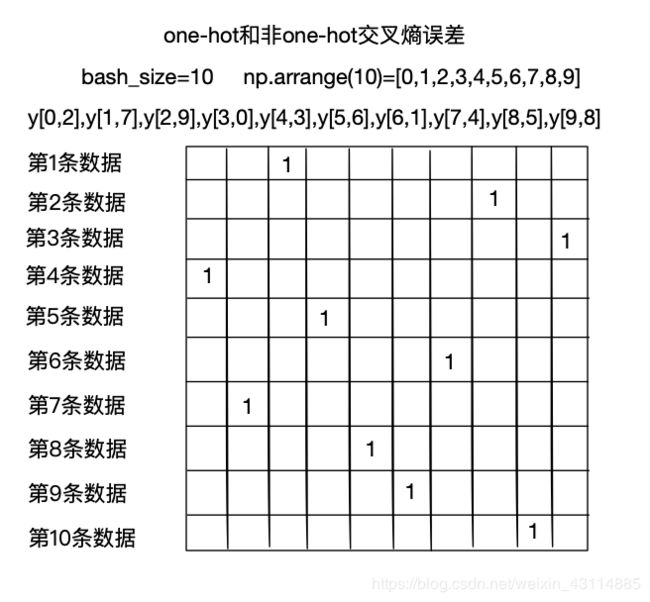
4.2.4 mini-batch 版交叉熵误差的实现
- one-hot格式的监督数据
def cross_entropy_error(y, t):
if y.ndim == 1: #一维数组要把第一维放到第二维,表示只有一条数据
t = t.reshape(1, t.size) #reshape函数代两维的参数
y = y.reshape(1, y.size)
batch_size = y.shape[0] #记下第一维的数值,表示有多少条数据
return -np.sum(t * np.log(y + 1e-7)) / batch_size
- 非one-hot格式的监督数据
def cross_entropy_error(y, t):
if y.ndim == 1:
t = t.reshape(1, t.size)
y = y.reshape(1, y.size)
batch_size = y.shape[0]
return -np.sum(np.log(y[np.arange(batch_size), t] + 1e-7))/ batch_size #根据start与stop指定的范围以及step设定的步长,生成一个 array,一个参数batch_size时,从0到batch_size,step=1,生成一个数组。
4.2.5 为何要设定损失函数
识别精度:相当于监督数据是n个t,k个输出y,识别出了m个,识别精度是m/n
损失函数:相当于监督数据有n个t,k个输出y,识别出了m个,用一个函数function(n,k)拟合出两个之间的差别程度,损失函数越小,说明识别的越符合
- 识别精度对于参数微小变化反馈不大,可能100个数据,调整某个参数,还是能识别32个数据,描述函数变化的导数为0,无法相应去知道怎么调整参数
- 而对于损失函数:如果导数的值为负,通过使该权重参数向正方向改变,可以减小损失函数的值;反过来,如果导数的值为正,则通过使该权重参数向负方向改变,可以减小损失函数的值。不过,当导数的值为 0 时,无论权重参数向哪个方向变化,损失函数的值都不会改变,此时该权重参数的更新会停在此处。
end
- 原书为《深度学习入门 基于Python的理论与实现》作者:斋藤康毅
人民邮电出版社 - 本文章是gitchat的《陆宇杰的训练营:15天共读深度学习》1的课程读书笔记
- 本文章大量引用原书中的内容和训练营课程中的内容作为笔记
《陆宇杰的训练营:15天共读深度学习》 ↩︎