android sensor 框架分析---sensor 总结
7 总结
Sensor总的框架图如下,
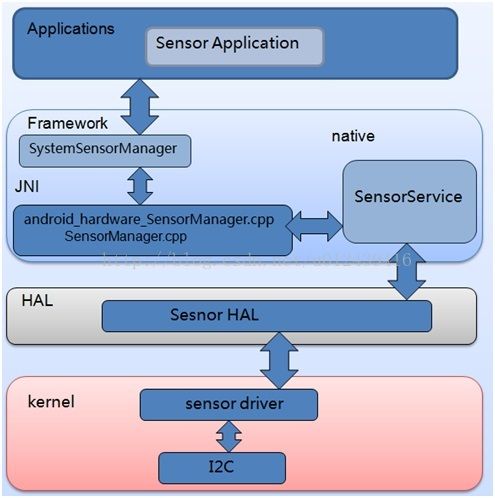
形象一点讲,整个Sensor的软件架构就像是水泵抽水灌溉。Service扮演电机的角色,它不断的产生抽水的动力,
并将水输送至目的地(APP),驱动扮演泵的角色,它负责完成抽水的必要准备并抽水,HAL则很像是连接电机和泵的管道。
driver可以逻辑上分为三部分,一部分支持它本身的功能,i2c读写,中断或者轮询处理。第二部分为sysfs文件节点,
接受HAL层传递下来的操作,通过i2c读写完成任务。第三部分为input子系统(注意,该处为Linux内核的input子系统,
并不是Android的input系统),负责数据上报。
HAL层的作用一是屏蔽硬件差异,二是传递控制和数据。
SensorService本身就是一个线程(Thread为其父类),循环地执行threadLoop(Android的机制),
该函数一方面负责poll数据,一方面得到数据后处理,通过管道发送。
分析的关键路线有2条,从上到下的控制流,从下到上的数据流。
控制流主要包括一些参数的设置,打开sensor,设置sensor频率等等,典型的从上往下。控制从APP注册监听器开始,
是一个观察者设计模式。注册监听器的直接操作就是enable和setDelay两个操作(unregisterListener则对应disable操作),
Service与APP并不是执行在同一个进程内的,Framework传递来的控制需要通过进程通信传递至Service,
使用的就是Binder机制。Service是唯一的,APP可以有无限个,Service为它们服务。
这样设计的原因显而易见——保证单一控制:硬件是唯一的(比如某一个加速度Sensor),对它的控制也应该是唯一的,
不应该由各APP单独控制。比如enable操作,如果已经有APP打开了设备,那么只需要将引用计数增加1即可,
并不会真正的触发驱动的操作;disable操作,如果引用计数大于1,说明当前除了该APP,还有其他使用者,
那么也不会触发驱动的操作。Service与HAL层属于同一个进程,Service调用HAL层的函数,HAL找到对应的文件节点,
根据不同的目的写入不同的值来触发驱动的操作。驱动根据得到的指令,读写设定好的寄存器控制流就得到了最终的落实。
驱动负责收集数据(中断或者轮询模式),通过input子系统(也有部分厂商选择使用IIO)上报数据。HAL层使用poll监控input节点,
数据到来后poll返回,然后读取数据。Service部分有一个线程,该线程可以理解为一个循环,不断地poll HAL层的数据。
收到数据后,Service会做一些处理(比如计算虚拟Sensor的数据),之后则通过socket将数据发送至APP进程。
APP收到数据后,遍历当前已经注册的listener,通知它们,观察者模式完成。与控制流相同,数据流依然是一个
Service对应多个APP,Service会将数据发送到多个APP。
最后说明一下,数据从服务端到客户端的跨进程并没有使用binder机制,因为Sensor数据量比较大,binder实现比较困难。