51单片机 + ESP8266 实现远程控制小灯、温度采集
目录
1、准备工作
1.1、软件
1.2、硬件
2、硬件连线
3、程序实现
3.1、单片机程序实现
main.c
public.h
public.c
temp.h
temp.c
3.2、服务端实现
4、效果展示
5、总结
1、准备工作
1.1、软件
- keil 4 --- 单片机程序编译、构建
- 串口调试助手 --- 初始化 ESP8266
- java8 运行环境 --- 服务端运行环境(可以在 oracle 官网下载,也可以直接在360软件管家上下载)
- maven 3 --- 构建项目(配置远程仓库为阿里公共仓库)
- IDEA 2019.3 --- Java IDE,用于直接运行服务端。
1.2、硬件
- STC89C516
- 跳线若干
- ESP8266
- DS18B20
笔者手里面的硬件是 普中51-单核-A4 51单片机开发学习板,上面的硬件都已经集成在开发学习板上了。
2、硬件连线
可以参考我的上一篇文章 硬件连线 部分,没有变动。
3、程序实现
3.1、单片机程序实现
-
main.c
#include "public.h"
#include "temp.h"
sbit LED1 = P2^0;
sbit LED2 = P2^1;
sbit LED3 = P2^2;
sbit LED4 = P2^3;
sbit LED5 = P2^4;
sbit LED6 = P2^5;
sbit LED7 = P2^6;
sbit LED8 = P2^7;
// 全局配置信息
// wifi 名称
//ucharx* WIFI_NAME = "";
// wifi 密码
//ucharx* WIFI_PWD = "";
// tcp server 地址
uchar* xdata TCP_SERVER_ADDRESS = "192.168.0.6";
// tcp server 端口
uint TCP_SERVER_PORT = 8888;
// 设备名称
uchar* xdata DEVICE_NAME = "test-01";
// 连接状态校验间隔时间, 单位: 秒
uintx CHECK_TCP_STATUS_INTERVAL = 30;
// 数据采集间隔时间, 单位: 秒
uintx DATA_COLLECT_INTERVAL = 5;
// 串口中断接收相关
uintx scount = 0, maxLen = 150, tscount = 0;
ucharx srdatas[151];
// 全局外部 RAM 暂存指针
ucharx __rdatasCpy__[151];
// 计时器 0, 多大代表有多少个 50ms(0 ~ 65535)
uintx time0Count = 0;
// 串口接收数据已处理标志
bit sflag = 0;
// 校验连接发送标志(1-需要发送查询指令, 2-查询指令已经发送)
ushortx tsflag = 0;
// 是否需要读取温度信息并发送
bit tempFlag = 0;
void SysInit();
void SetWifi();
void DealReceiveData();
ushort DealReceiveControlCommand(uchar* line, uint length);
ushort DealReceiveRemoteConnectInfo(uchar* line, uint length);
void ValidWifiConnectInfo(ushort action);
uchar* GenerateDeviceStatusReportInfo(uchar type);
void SendDeviceStatusInfo2Server(uchar type, uchar forceSend);
uchar* GetSerialReceiveData();
// 深度拷贝出一份串口当前接收到的数据
uchar* GetSerialReceiveData() {
uintx i = 0;
clearStr(__rdatasCpy__, 151);
for(i = 0; i < scount; i++) {
__rdatasCpy__[i] = srdatas[i];
}
return __rdatasCpy__;
}
// 生成设备端的报告信息
uchar* GenerateDeviceStatusReportInfo(uchar type) {
ucharx str[50];
int xdata temp;
clearStr(str, 50);
// 只上报 LED 状态
if(type == 0) {
sprintf(str, "data-reporting %s led=%c%c%c%c%c%c%c%c\r\n",
DEVICE_NAME,
!LED1 ? '1' : '0', !LED2 ? '1' : '0', !LED3 ? '1' : '0', !LED4 ? '1' : '0',
!LED5 ? '1' : '0', !LED6 ? '1' : '0', !LED7 ? '1' : '0', !LED8 ? '1' : '0');
return str;
}
EA = 0;
temp = Ds18b20ReadTemp();
EA = 1;
sprintf(str, "data-reporting %s led=%c%c%c%c%c%c%c%c;temp=%d\r\n",
DEVICE_NAME,
!LED1 ? '1' : '0', !LED2 ? '1' : '0', !LED3 ? '1' : '0', !LED4 ? '1' : '0',
!LED5 ? '1' : '0', !LED6 ? '1' : '0', !LED7 ? '1' : '0', !LED8 ? '1' : '0',
temp);
return str;
}
// 接收到字符串出现 /r/n, 视为新行标志
void DealReceiveData() {
uintx t = 0, len = 0;
ushortx executeResult = 0;
uchar* xdata newLine;
uchar* xdata tempStr;
uchar* tline;
// 判定为未接收到有效数据
if(sflag == 1 || scount < 4) {
return;
}
// 延时之后依然没有数据, 既断定为串口有数据接收到
tscount = scount;
// 使用 Delay2 有问题
// Delay2(100);
t = time0Count;
// 延时 50 ms
while(abs(time0Count - t) <= 0);
if(scount != tscount) {
return;
}
// 数据处理期间暂停串口中断使能
ES = 0;
/**/
newLine = GetSerialReceiveData();
// 处理完之后清空串口接收缓存
clearStr(srdatas, maxLen + 1);
scount = 0;
sflag = 1;
ES = 1;
newLine = trimStr(newLine);
// trim 之后会拷贝已经接收的数据, 之后开启串口继续监听接口接收远程数据
len = strlen(newLine);
// 无有效数据
if(len < 4) {
return;
}
t = 0;
do {
if(t == 0) {
tempStr = strtok(newLine, "\r\n");
} else {
tempStr = strtok(NULL, "\r\n");
}
t++;
if(tempStr != NULL) {
tempStr = trimStr(tempStr);
len = strlen(tempStr);
if(len > 0) {
executeResult = DealReceiveControlCommand(tempStr, len);
if(executeResult == 1) {
continue;
}
DealReceiveRemoteConnectInfo(tempStr, len);
}
}
} while(tempStr != NULL);
}
ushort DealReceiveControlCommand(uchar* line, uintx length) {
uintx i = 0, t = 0, len = 0;
ucharx controlCommand;
uchar* xdata tempStr;
uchar* xdata command;
if(length <= 3) {
return 0;
}
// 不是以 "+IPD" 开头
if(memcmp(line, "+IPD", 4) != 0) {
return 0;
}
do {
if(t == 0) {
tempStr = strtok(line, ":");
} else {
tempStr = strtok(NULL, ":");
}
if(tempStr != NULL) {
t++;
if(t == 2) {
command = trimStr(tempStr);
}
}
} while(tempStr != NULL);
if(t == 2) {
t = 0;
do {
if(t == 0) {
tempStr = strtok(command, " ");
if(strcmp(tempStr, "led") != 0) {
return 0;
}
} else {
tempStr = strtok(NULL, " ");
}
if(tempStr != NULL) {
t++;
if(t == 2) {
command = trimStr(tempStr);
}
}
} while(tempStr != NULL);
if(t == 2) {
len = strlen(command);
len = len > 8 ? 8 : len;
for(i < 0; i < len; i++) {
if(command[i] == '/') {
continue;
}
controlCommand = command[i] - 0x30;
switch(i + 1) {
case 1:
LED1 = !controlCommand;
break;
case 2:
LED2 = !controlCommand;
break;
case 3:
LED3 = !controlCommand;
break;
case 4:
LED4 = !controlCommand;
break;
case 5:
LED5 = !controlCommand;
break;
case 6:
LED6 = !controlCommand;
break;
case 7:
LED7 = !controlCommand;
break;
case 8:
LED8 = !controlCommand;
break;
}
}
// 重新上传 LED 状态
SendDeviceStatusInfo2Server(0, 1);
return 1;
}
}
return 0;
}
// 处理接收连接状态信息
ushort DealReceiveRemoteConnectInfo(uchar* line, uint length) {
// 未发送查询指令, 跳过
if(tsflag != 2) {
return 0;
}
// 接收到连接状态响应信息
if(memcmp(line, "STATUS", 6) == 0) {
// 远程未连接
if(strcmp(line, "STATUS:3") != 0) {
// 重连
ValidWifiConnectInfo(2);
}
// 远程连接有效
else {
ValidWifiConnectInfo(3);
}
tsflag = 3;
return 1;
}
return 0;
}
// action: 1 表示发送发送状态查询指令, action: 2 表示重新连接远程服务器, 并上送客户端 ID
// action: 3 表示重新上送客户端 ID
void ValidWifiConnectInfo(ushort action) {
uchar xdata tempStr[100];
uintx len = 0;
if(action == 1) {
printf("AT+CIPSTATUS\r\n");
tsflag = 2;
return;
}
if(action == 2) {
clearStr(tempStr, 100);
ET0 = 0;
printf("AT+CIPCLOSE=2\r\n");
Delay2(5);
printf("AT+CIPSTART=2,\"TCP\",\"%s\",%d\r\n", TCP_SERVER_ADDRESS, TCP_SERVER_PORT);
Delay2(20);
sprintf(tempStr, "register %s\r\n", DEVICE_NAME);
len = strlen(tempStr);
printf("AT+CIPSEND=2,%d\r\n", len + 2);
Delay2(20);
printf("%s\r\n\r\n", tempStr);
tsflag = 0;
ET0 = 1;
}
if(action == 3) {
clearStr(tempStr, 100);
ET0 = 0;
sprintf(tempStr, "register %s\r\n", DEVICE_NAME);
len = strlen(tempStr);
printf("AT+CIPSEND=2,%d\r\n", len + 2);
Delay2(20);
printf("%s\r\n\r\n", tempStr);
tsflag = 0;
ET0 = 1;
}
}
void SendDeviceStatusInfo2Server(uchar type, uchar forceSend) {
uchar* xdata reportInfo;
uintx len = 0;
if(forceSend == 0 && tempFlag == 0) {
return;
}
// 读取温度期间关闭中断使能
reportInfo = GenerateDeviceStatusReportInfo(type);
len = strlen(reportInfo);
printf("AT+CIPSEND=2,%d\r\n", len + 2);
Delay2(20);
printf("%s\r\n\r\n", reportInfo);
tempFlag = 0;
}
void SysInit() {
// 初始化定时器1, 配置波特率发生器
TH1 = 0xFD; //晶振11.0592mhz 波特率设为9600
TL1 = TH1;
//定时器1方式2
TMOD |= 0x20;
//串口接收使能
SCON = 0x50;
//串口中断使能
ES = 1;
//定时器1使能
TR1 = 1;
//发送中断标记位,必须设置
TI = 1;
// 初始化定时器0, 做系统定时任务(11.0592MHz, 定时 50ms)
/* */
TH0 = 0x4C;
TL0 = 0x00;
// 工作在方式2
TMOD |= 0x01;
// 定时器0使能
TR0 = 1;
ET0 = 1;
// 初始化串口数据接收缓存
clearStr(srdatas, maxLen + 1);
// 初始化 wifi 模块
printf("begin init wifi module...\r\n");
SetWifi();
printf("wifi module inited...\r\n");
EA=1;
}
void SetWifi() {
ucharx tempStr[100];
uintx len = 0;
clearStr(tempStr, 100);
// 预留足够的时间让 wifi 启动
Delay2(3000);
printf("AT+CIPMUX=1\r\n");
Delay2(1000);
printf("AT+CIPSERVER=1\r\n");
Delay2(1000);
printf("AT+CIPCLOSE=2\r\n");
Delay2(2000);
printf("AT+CIPSTART=2,\"TCP\",\"%s\",%d\r\n", TCP_SERVER_ADDRESS, TCP_SERVER_PORT);;
Delay2(2000);
sprintf(tempStr, "register %s\r\n", DEVICE_NAME);
len = strlen(tempStr);
printf("AT+CIPSEND=2,%d\r\n", len + 2);
Delay2(200);
printf("%s\r\n\r\n", tempStr);
Delay2(10);
}
/**/
void Timer0() interrupt 1 {
uintx t = 0;
ET0 = 0;
// 继续下一轮定时
TH0 = 0x4C;
TL0 = 0x00;
time0Count = (time0Count + 1) % 65536;
// 大概 30s 判断一下连接是否断开, 断开之后需要重连
if(time0Count % (20 * CHECK_TCP_STATUS_INTERVAL) == 0) {
tsflag = 1;
}
// 大概 5s 上报一次温度信息
if(tempFlag == 0 && time0Count % (20 * DATA_COLLECT_INTERVAL) == 0) {
tempFlag = 1;
}
ET0 = 1;
}
void Usart() interrupt 4 {
if(RI == 1)
{
RI = 0;
srdatas[scount] = SBUF;
scount += 1;
if(scount >= maxLen) {
scount = 0;
}
sflag = 0;
}
}
void main() {
SysInit();
while(1) {
DealReceiveData();
ValidWifiConnectInfo(tsflag == 1 ? 1 : 0);
SendDeviceStatusInfo2Server(1, 0);
}
}
-
public.h
#ifndef __TEMP_H_
#define __TEMP_H_
#include "public.h"
//---重定义关键词---//
#ifndef uchar
#define uchar unsigned char
#endif
#ifndef uint
#define uint unsigned int
#endif
//--定义使用的IO口--//
sbit DSPORT=P3^7;
//--声明全局函数--//
void Delay1ms(uint );
uchar Ds18b20Init();
void Ds18b20WriteByte(uchar com);
uchar Ds18b20ReadByte();
void Ds18b20ChangTemp();
void Ds18b20ReadTempCom();
int Ds18b20ReadTemp();
#endif
-
public.c
#include "public.h"
// 延时 2 毫秒
void Delay2(ulong cnt) {
ulongx i = 0, size = cnt * 10;
for(i=0; i < size; i++);
}
// 10 进制转 2 进制
uchar* decimal2binary(uint val) {
uchar chs[8];
uint i = 0, tmp = val;
for(i = 0; i < 8; i++) {
if(tmp == 0) {
chs[i] = 0;
continue;
}
chs[i] = (tmp % 2) + 48;
tmp = tmp / 2;
}
for(i = 0; i < 4; i++) {
tmp = chs[i];
chs[i] = chs[8-i-1];
chs[8-i-1] = tmp;
}
return chs;
}
// 将字符串转换为 int 类型
uint parseInt(uchar* str, uint len) {
uint i = 0, resVal = 0;
for(i = 0; i < len; i++) {
resVal = resVal + ((str[i] - 0x30) * pow(10, len - i - 1));
}
return resVal;
}
// 反转字符串
uchar* reversalStr(uchar* str) {
uintx len = strlen(str);
uintx hlen = len / 2;
uintx i = 0;
ucharx tch;
for(i = 0; i < hlen; i++) {
tch = str[i];
str[i] = str[len - i - 1];
str[len - i - 1] = str[i];
}
return str;
}
//去除尾部空格
uchar* rtrimStr(uchar* str)
{
uintx len = strlen(str);
uchar* xdata p = str + len - 1;
if (str == NULL || *str == '\0')
{
return str;
}
while (p >= str && isspace(*p))
{
*p = '\0';
--p;
}
return str;
}
//去除首部空格
uchar* ltrimStr(uchar* str)
{
uintx len = 0;
uchar* xdata p = str;
if (str == NULL || *str == '\0')
{
return str;
}
while (*p != '\0' && isspace(*p))
{
++p;
++len;
}
memmove(str, p, strlen(str) - len + 1);
return str;
}
//去除首尾空格
uchar* trimStr(uchar* str)
{
str = rtrimStr(str);
str = ltrimStr(str);
return str;
}
// 清空字符数组
uchar* clearStr(uchar* str, uint len) {
uintx i = 0;
if(len == -1) {
len = strlen(str);
}
for(i = 0; i < len; i++) {
str[i] = '\0';
}
return str;
}-
temp.h
#ifndef __TEMP_H_
#define __TEMP_H_
#include "public.h"
//---重定义关键词---//
#ifndef uchar
#define uchar unsigned char
#endif
#ifndef uint
#define uint unsigned int
#endif
//--定义使用的IO口--//
sbit DSPORT=P3^7;
//--声明全局函数--//
void Delay1ms(uint );
uchar Ds18b20Init();
void Ds18b20WriteByte(uchar com);
uchar Ds18b20ReadByte();
void Ds18b20ChangTemp();
void Ds18b20ReadTempCom();
int Ds18b20ReadTemp();
#endif
-
temp.c
#include"temp.h"
/*******************************************************************************
* 函 数 名 : Delay1ms
* 函数功能 : 延时函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Delay1ms(uint y)
{
uint x;
for( ; y>0; y--)
{
for(x=110; x>0; x--);
}
}
/*******************************************************************************
* 函 数 名 : Ds18b20Init
* 函数功能 : 初始化
* 输 入 : 无
* 输 出 : 初始化成功返回1,失败返回0
*******************************************************************************/
uchar Ds18b20Init()
{
uchar i;
DSPORT = 0; //将总线拉低480us~960us
i = 70;
while(i--);//延时642us
DSPORT = 1; //然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低
i = 0;
while(DSPORT) //等待DS18B20拉低总线
{
Delay1ms(1);
i++;
if(i>5)//等待>5MS
{
return 0;//初始化失败
}
}
return 1;//初始化成功
}
/*******************************************************************************
* 函 数 名 : Ds18b20WriteByte
* 函数功能 : 向18B20写入一个字节
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Ds18b20WriteByte(uchar dat)
{
uint i, j;
for(j=0; j<8; j++)
{
DSPORT = 0; //每写入一位数据之前先把总线拉低1us
i++;
DSPORT = dat & 0x01; //然后写入一个数据,从最低位开始
i=6;
while(i--); //延时68us,持续时间最少60us
DSPORT = 1; //然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值
dat >>= 1;
}
}
/*******************************************************************************
* 函 数 名 : Ds18b20ReadByte
* 函数功能 : 读取一个字节
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
uchar Ds18b20ReadByte()
{
uchar byte, bi;
uint i, j;
for(j=8; j>0; j--)
{
DSPORT = 0;//先将总线拉低1us
i++;
DSPORT = 1;//然后释放总线
i++;
i++;//延时6us等待数据稳定
bi = DSPORT; //读取数据,从最低位开始读取
/*将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0。*/
byte = (byte >> 1) | (bi << 7);
i = 4; //读取完之后等待48us再接着读取下一个数
while(i--);
}
return byte;
}
/*******************************************************************************
* 函 数 名 : Ds18b20ChangTemp
* 函数功能 : 让18b20开始转换温度
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Ds18b20ChangTemp()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0x44); //温度转换命令
//Delay1ms(100); //等待转换成功,而如果你是一直刷着的话,就不用这个延时了
}
/*******************************************************************************
* 函 数 名 : Ds18b20ReadTempCom
* 函数功能 : 发送读取温度命令
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void Ds18b20ReadTempCom()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0xbe); //发送读取温度命令
}
/*******************************************************************************
* 函 数 名 : Ds18b20ReadTemp
* 函数功能 : 读取温度
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
int Ds18b20ReadTemp()
{
int xdata temp = 0;
uchar xdata tmh, tml;
float xdata tp;
Ds18b20ChangTemp(); //先写入转换命令
Ds18b20ReadTempCom(); //然后等待转换完后发送读取温度命令
tml = Ds18b20ReadByte(); //读取温度值共16位,先读低字节
tmh = Ds18b20ReadByte(); //再读高字节
temp = tmh;
temp <<= 8;
temp |= tml;
// 此时得到的温度是实际数值的补码,需要转换
if(temp < 0) //当温度值为负数
{
//因为读取的温度是实际温度的补码,所以减1,再取反求出原码
temp=temp-1;
temp=~temp;
tp=temp;
temp=tp*0.0625*100+0.5;
//留两个小数点就*100,+0.5是四舍五入,因为C语言浮点数转换为整型的时候把小数点
//后面的数自动去掉,不管是否大于0.5,而+0.5之后大于0.5的就是进1了,小于0.5的就
//算加上0.5,还是在小数点后面。
}
else
{
tp=temp;//因为数据处理有小数点所以将温度赋给一个浮点型变量
//如果温度是正的那么,那么正数的原码就是补码它本身
temp=tp*0.0625*100+0.5;
//留两个小数点就*100,+0.5是四舍五入,因为C语言浮点数转换为整型的时候把小数点
//后面的数自动去掉,不管是否大于0.5,而+0.5之后大于0.5的就是进1了,小于0.5的就
//算加上0.5,还是在小数点后面。
}
return temp;
}上面是所有的单片机端程序实现,具体细节和笔者的上一篇文章 51 单片机 + ESP8266 实现互联网远程控制小灯 程序讲解部分大体相同,但是在该程序的基础上做了以下优化:
- 串口接收数据缓存长度提高到 150 个字节
- 支持处理多行数据
- 远程重连方式修改为远程连接校验、断开重连方式
- 添加客户端小灯状态、温度上传功能
注意:程序编译选项要按照如下的配置选择!!!
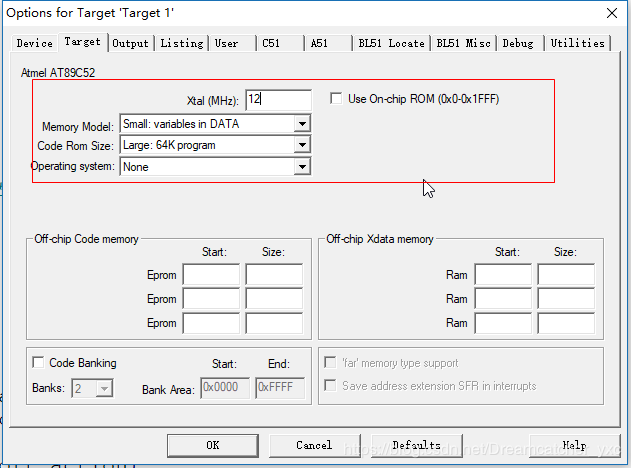
构建结果如下:
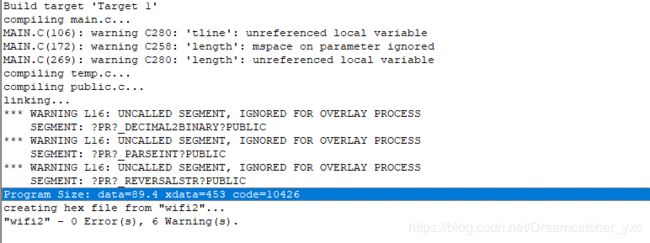
将构建好的目标文件烧入单片机即可。
3.2、服务端实现
服务端采用的技术栈如下:
- netty --- 做 tcp server (嵌入式启动,能够单机保持大量 tcp 长连接而不占用大量内存,很赞)
- jetty9 --- 做 http server(嵌入式启动,很赞)
- hutool --- java 后端工具类(很赞)
- maven3 --- 项目构建工具
- jquery --- 涉及过一点点前端的都应该知道这位老将军的大名,虽然现在有点过时了,但是并不代表它不好用,更不能代表它不适合现在 web 网站开发。
- vue --- 尤大大 神作,web 前端 mvvm 框架主流框架之一,国内很出名。
- vant --- 有赞前端团队基于 vue 打造的移动端 UI 库,这里不和其他移动端 UI 库比较,个人觉得好用到哭,大赞有 赞前端团队 的开源精神。
服务端代码这里就不贴出来了,个人会上传到 gitee 和 github 上面,小伙伴们克隆下载即可。
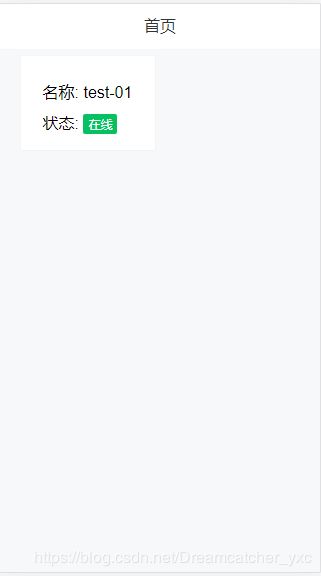
4、效果展示


5、总结
按照自己的设想,服务端还有许多需要实现的功能,这里指示做了一个简单的架子,小伙伴们有兴趣可以在这个架子上添加更多功能,如果功能复杂建议引入 J2EE 框架,方便后期开发。
有问题可以留言评论,笔者会尽量为各位解答。