动态实例分割SOLOv2,更快更强更精准!

今天跟大家分享下前天新出的论文 SOLOv2: Dynamic, Faster and Stronger,一看这名字就知道很霸气!SOLO 超越自己,在原有架构基础上引入动态卷积和发明了Matrix NMS,再次刷新COCO 实例分割数据集的最高精度(41.7 AP),而且其轻量级版本精度与Mask RCNN相近(37.1 AP vs 37.8),而速度能达到 31.3 fps(GPU V100)!
下图中红色标出的即为SOLOv2的结果:

可谓在实时轻量级和高精度两个战场都很抢眼!
该文作者信息:

论文出自沈春华老师组,作者单位澳大利亚阿德莱德大学、同济大学、字节跳动公司。
作者是在自己之前的工作SOLO基础上做的改进,所以我们有必要看看SOLO的架构:
SOLO架构
长久以来实例分割都是在目标检测给出框的情况下再进行目标mask分割,而这种思路和人类的视觉感知是不同的,人眼是可以直接定位到目标的轮廓的。SOLO的本意为 Segmenting Objects by Locations,即根据位置分割目标。

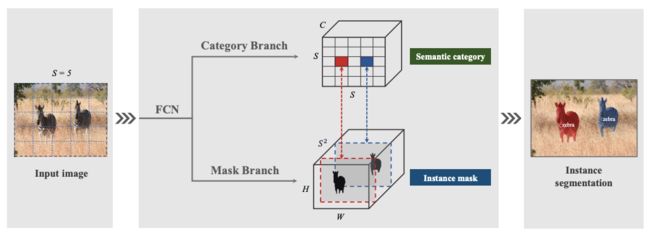
SOLO的预测头
SOLO将图像划分为SxS个网格,认为每个网格都是一个潜在的目标实例。
具体实现上,图像经过全卷积网络(FCN)后进入两个分支的预测。一个类别分支,预测每个网格所处的物体类别,每个网格对应一个C维类别向量(C为类别数),总的类别矩阵大小为S x S x C;一个mask分支预测每个网格所属的物体mask,总的mask矩阵大小为H x W x (S x S)。
请注意:mask是不关乎类别的,无论是什么物体,只要该物体落入了这个网格,mask 分支都预测它的mask。
mask分支预测得到的每个网格的mask的大小是和原图大小相等,每个网格只对应落入此网格的物体的mask。
这样来自相同位置(网格)的物体类别和相应mask就出来了,每个网格完成了单个目标实例的分割。
由于一个物体可能落在不同的相邻网格里,所以以上过程得到的肯定是多个网格含有相同的物体的mask。故最后必须进行NMS(非极大抑制),以消除重复的分割结果。
从作者的可视化图:
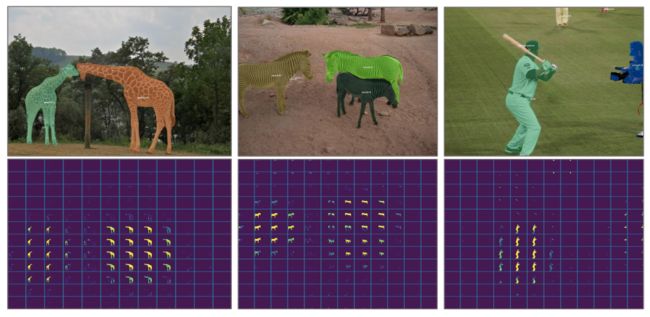
可以很明显的看出这个问题,NMS是必须的。
现实图片中,由于目标实例并不会很密集,所以计算SxS个网格的mask会有大量的计算冗余,作者在SOLOv1中给出的解决方案是对mask预测分支进行分解,分别为预测 x-分支和y-分支,以降低计算量和内存占用,如下图b中所示。
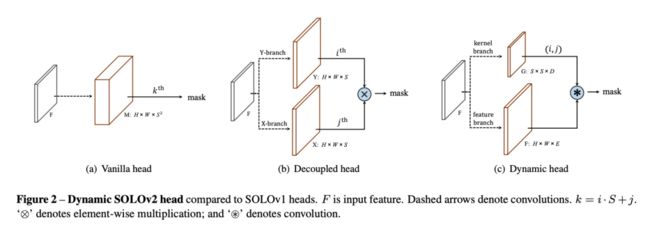
这样mask的预测就从S x S 个变为预测 S + S 个。
作者在SOLOv2中一项重要改进是引入动态卷积。因为在mask预测时每个网格使用的特征是固定的,输出的Mask是冗余的,可以直接从网络的类别分类结果过滤掉那些不含目标的,同时使用动态卷积,也可以降低模型参数。
所谓动态滤波,即滤波核的参数是通过网络预测出来的,这样网络自适应调整的能力也增强了。
如上图中的(c)。模型在mask预测分支时动态进行卷积核学习和特征学习,最后将此二者卷积得到最终的mask。
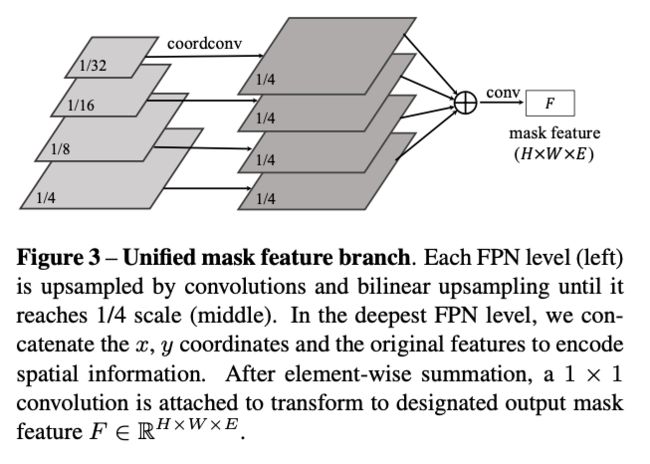
从FPN中构造mask分支预测前的特征:
作者的另一个重要更新是发明了Matrix NMS方法。
其启发自soft NMS,soft NMS 是每次选择置信度最高的候选mask(或框)降低与其存在重叠的候选mask(或框)的置信度。这个过程是迭代的、顺序的,没法并行。
作者反其道而行之,既然是降低每个mask的置信度,那我就干脆想办法按照一定规则对所有mask挨个降低置信度。而某一候选mask j 置信度被降低,和两方面因素有关:
1)与其存在重叠的置信度比起其高的mask i,迫使mask j置信度衰减;
2)mask i 本身也有一定概率置信度被其它候选mask k 降低,mask i 置信度降低的概率。
当然你也可以说mask k的置信度还有可能被其他mask 迫使衰减,如果考虑到完整链条,那这个过程就复杂了,作者以上面的过程作为计算衰减因子的近似,不追求完美的数学表达。而且实际计算时仅考虑最大重叠的置信度高的mask的带来的衰减。
mask i 置信度被降低的概率:
![]()
mask j 置信度衰减因子:
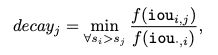
事实证明,这样的近似已经够用了。
以上每个mask置信度衰减的过程是可并行计算的,计算速度也很快。
作者甚至在论文中给出了Matrix NMS的Python代码:

这个Matrix NMS不仅适用于SOLO,也可以用于其他目标检测和实例分割算法需要NMS的场合中。
实验结果
作者在COCO test-dev数据集上进行了实例分割实验:

SOLOv2达得了新的SOTA,使用Res-DCN-101-FPN,AP 达到41.7!比Mask RCNN 高近 4 个百分点。
作者在生成的mask 上直接生成目标框,得到同样在COCO test-dev数据集上目标检测的结果,同样达到了主流算法水平:

超越著名的单阶段目标检测器FCOS、CenterNet。
下图为与Mask R-CNN分割结果的比较:
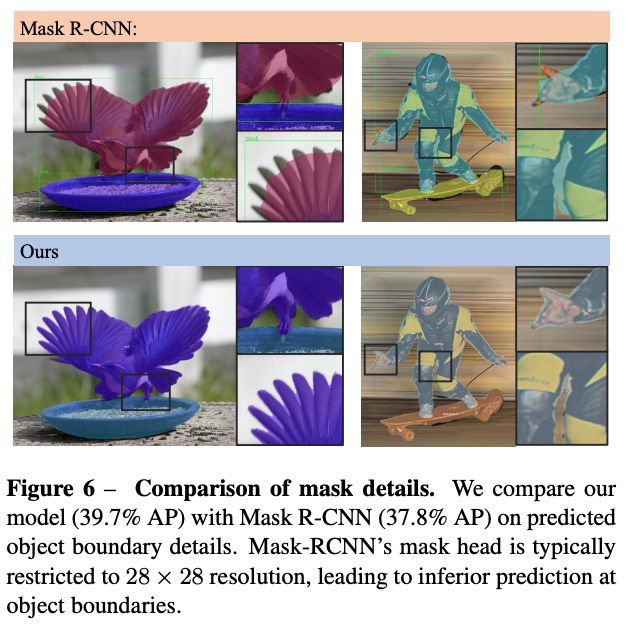
可见在物体边缘上得到的结果更好。
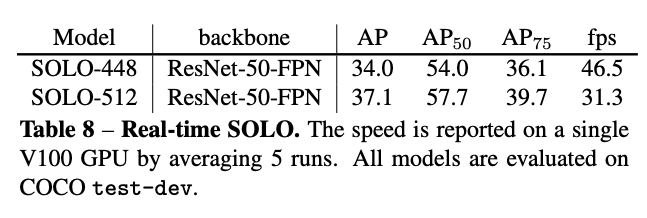
除了精度高,速度也是SOLOv2的一点亮点,精度与Mask R-CNN相近的SOLO-512 在V100的GPU上可达31.3 fps!
下图为作为目标检测算法使用时,与其他算法的精度和推断时间比较的散点图:
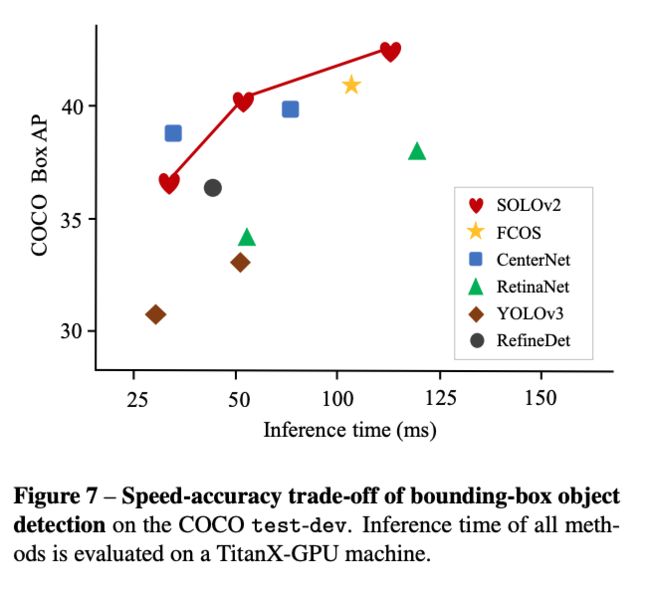
SPLOv2的几个版本在速度与其他相近时,精度大幅超越对手。从图中可见,相比经常被谈起的YOLOv3,SOLOv2 精度提升巨大。
作者在新出的LVIS实例分割数据集上与Mask R-CNN也进行了对比:
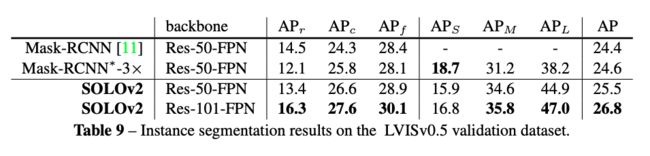
大多数情况下好于Mask R-CNN,平均精度更高,唯有在小目标分割上低于Mask R-CNN,这可能与网格的划分有关系(当然划分密集有助于检测到小目标,但计算代价更大)。
将SOLOv2用于全景分割,在COCO val2017数据集上的结果:
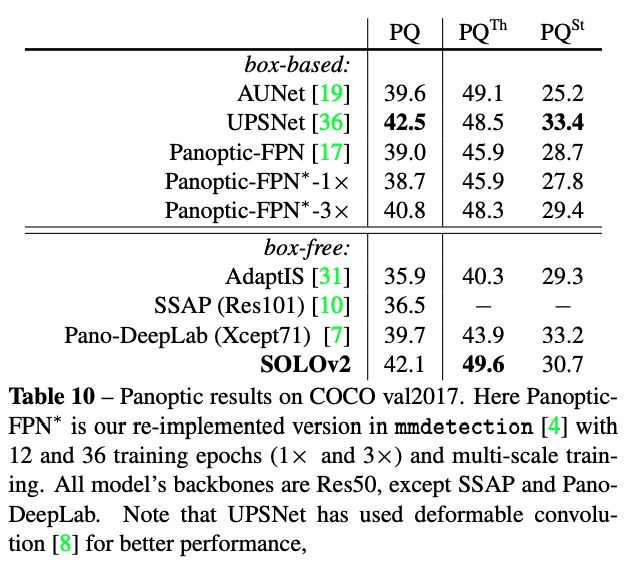
SOLOv2取得了与之前最高精度的UPSNet相近的精度!
精度高、速度快、代码还将开源!相信SOLO系列算法必将在实例分割、目标检测、全景分割领域留下浓墨重彩的一笔!
论文地址:
https://arxiv.org/pdf/2003.10152.pdf
代码地址:
https://github.com/WXinlong/SOLO
(目前还未开源)
在我爱计算机视觉公众号后台回复“SOLO”,即可收到这两篇论文的下载。
END

备注:分割

图像分割交流群
语义分割、实例分割、全景分割、抠图等技术,若已为CV君其他账号好友请直接私信。
我爱计算机视觉
微信号 : aicvml
QQ群:805388940
微博/知乎:@我爱计算机视觉
网站:www.52cv.net

在看,让更多人看到 