一文看懂Python迷宫生成和迷宫破解算法
@本文来源于公众号:csdn2299,喜欢可以关注公众号 程序员学府
今天小编就为大家分享一今天小编就为大家分享一篇Python迷宫生成和迷宫破解算法实例,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧
文章目录
- 1迷宫生成
- 1.随机PRIM
- 2.深度优先
- 2.迷宫破解
- 1.填坑法
- 2.回溯法
1迷宫生成
1.随机PRIM
思路:先让迷宫中全都是墙,不断从列表(最初只含有一个启始单元格)中选取一个单元格标记为通路,将其周围(上下左右)未访问过的单元格放入列表并标记为已访问,再随机选取该单元格与周围通路单元格(若有的话)之间的一面墙打通。重复以上步骤直到列表为空,迷宫生成完毕。这种方式生成的迷宫难度高,岔口多。
效果:
代码:
import random
import numpy as np
from matplotlib import pyplot as plt
def build_twist(num_rows, num_cols): # 扭曲迷宫
# (行坐标,列坐标,四面墙的有无&访问标记)
m = np.zeros((num_rows, num_cols, 5), dtype=np.uint8)
r, c = 0, 0
trace = [(r, c)]
while trace:
r, c = random.choice(trace)
m[r, c, 4] = 1 # 标记为通路
trace.remove((r, c))
check = []
if c > 0:
if m[r, c - 1, 4] == 1:
check.append('L')
elif m[r, c - 1, 4] == 0:
trace.append((r, c - 1))
m[r, c - 1, 4] = 2 # 标记为已访问
if r > 0:
if m[r - 1, c, 4] == 1:
check.append('U')
elif m[r - 1, c, 4] == 0:
trace.append((r - 1, c))
m[r - 1, c, 4] = 2
if c < num_cols - 1:
if m[r, c + 1, 4] == 1:
check.append('R')
elif m[r, c + 1, 4] == 0:
trace.append((r, c + 1))
m[r, c + 1, 4] = 2
if r < num_rows - 1:
if m[r + 1, c, 4] == 1:
check.append('D')
elif m[r + 1, c, 4] == 0:
trace.append((r + 1, c))
m[r + 1, c, 4] = 2
if len(check):
direction = random.choice(check)
if direction == 'L': # 打通一面墙
m[r, c, 0] = 1
c = c - 1
m[r, c, 2] = 1
if direction == 'U':
m[r, c, 1] = 1
r = r - 1
m[r, c, 3] = 1
if direction == 'R':
m[r, c, 2] = 1
c = c + 1
m[r, c, 0] = 1
if direction == 'D':
m[r, c, 3] = 1
r = r + 1
m[r, c, 1] = 1
m[0, 0, 0] = 1
m[num_rows - 1, num_cols - 1, 2] = 1
return m
2.深度优先
思路:从起点开始随机游走并在前进方向两侧建立墙壁,标记走过的单元格,当无路可走(周围无未访问过的单元格)时重复返回上一个格子直到有新的未访问单元格可走。最终所有单元格都被访问过后迷宫生成完毕。这种方式生成的迷宫较为简单,由一条明显但是曲折的主路径和不多的分支路径组成。
效果: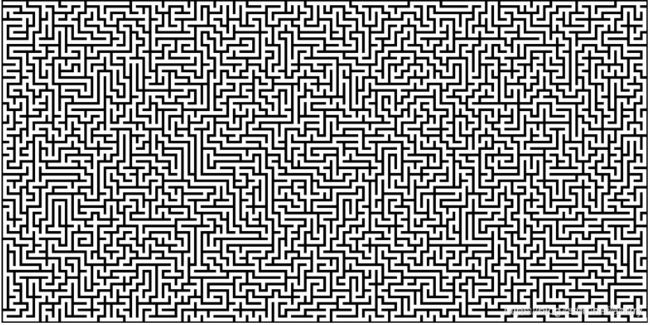
代码:
def build_tortuous(num_rows, num_cols): # 曲折迷宫
m = np.zeros((num_rows, num_cols, 5), dtype=np.uint8)
r = 0
c = 0
trace = [(r, c)]
while trace:
m[r, c, 4] = 1 # 标记为已访问
check = []
if c > 0 and m[r, c - 1, 4] == 0:
check.append('L')
if r > 0 and m[r - 1, c, 4] == 0:
check.append('U')
if c < num_cols - 1 and m[r, c + 1, 4] == 0:
check.append('R')
if r < num_rows - 1 and m[r + 1, c, 4] == 0:
check.append('D')
if len(check):
trace.append([r, c])
direction = random.choice(check)
if direction == 'L':
m[r, c, 0] = 1
c = c - 1
m[r, c, 2] = 1
if direction == 'U':
m[r, c, 1] = 1
r = r - 1
m[r, c, 3] = 1
if direction == 'R':
m[r, c, 2] = 1
c = c + 1
m[r, c, 0] = 1
if direction == 'D':
m[r, c, 3] = 1
r = r + 1
m[r, c, 1] = 1
else:
r, c = trace.pop()
m[0, 0, 0] = 1
m[num_rows - 1, num_cols - 1, 2] = 1
return m
2.迷宫破解
效果: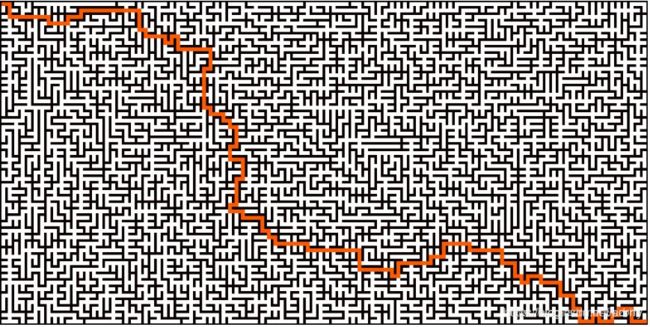

1.填坑法
思路:从起点开始,不断随机选择没墙的方向前进,当处于一个坑(除了来时的方向外三面都是墙)中时,退一步并建造一堵墙将坑封上。不断重复以上步骤,最终就能抵达终点。
优缺点:可以处理含有环路的迷宫,但是处理时间较长还需要更多的储存空间。
代码:
def solve_fill(num_rows, num_cols, m): # 填坑法
map_arr = m.copy() # 拷贝一份迷宫来填坑
map_arr[0, 0, 0] = 0
map_arr[num_rows-1, num_cols-1, 2] = 0
move_list = []
xy_list = []
r, c = (0, 0)
while True:
if (r == num_rows-1) and (c == num_cols-1):
break
xy_list.append((r, c))
wall = map_arr[r, c]
way = []
if wall[0] == 1:
way.append('L')
if wall[1] == 1:
way.append('U')
if wall[2] == 1:
way.append('R')
if wall[3] == 1:
way.append('D')
if len(way) == 0:
return False
elif len(way) == 1: # 在坑中
go = way[0]
move_list.append(go)
if go == 'L': # 填坑
map_arr[r, c, 0] = 0
c = c - 1
map_arr[r, c, 2] = 0
elif go == 'U':
map_arr[r, c, 1] = 0
r = r - 1
map_arr[r, c, 3] = 0
elif go == 'R':
map_arr[r, c, 2] = 0
c = c + 1
map_arr[r, c, 0] = 0
elif go == 'D':
map_arr[r, c, 3] = 0
r = r + 1
map_arr[r, c, 1] = 0
else:
if len(move_list) != 0: # 不在坑中
come = move_list[len(move_list)-1]
if come == 'L':
if 'R' in way:
way.remove('R')
elif come == 'U':
if 'D' in way:
way.remove('D')
elif come == 'R':
if 'L' in way:
way.remove('L')
elif come == 'D':
if 'U' in way:
way.remove('U')
go = random.choice(way) # 随机选一个方向走
move_list.append(go)
if go == 'L':
c = c - 1
elif go == 'U':
r = r - 1
elif go == 'R':
c = c + 1
elif go == 'D':
r = r + 1
r_list = xy_list.copy()
r_list.reverse() # 行动坐标记录的反转
i = 0
while i < len(xy_list)-1: # 去掉重复的移动步骤
j = (len(xy_list)-1) - r_list.index(xy_list[i])
if i != j: # 说明这两个坐标之间的行动步骤都是多余的,因为一顿移动回到了原坐标
del xy_list[i:j]
del move_list[i:j]
r_list = xy_list.copy()
r_list.reverse()
i = i + 1
return move_list
2.回溯法
思路:遇到岔口则将岔口坐标和所有可行方向压入栈,从栈中弹出一个坐标和方向,前进。不断重复以上步骤,最终就能抵达终点。
优缺点:计算速度快,需要空间小,但无法处理含有环路的迷宫。
代码:
def solve_backtrack(num_rows, num_cols, map_arr): # 回溯法
move_list = ['R']
m = 1 # 回溯点组号
mark = []
r, c = (0, 0)
while True:
if (r == num_rows-1) and (c == num_cols-1):
break
wall = map_arr[r, c]
way = []
if wall[0] == 1:
way.append('L')
if wall[1] == 1:
way.append('U')
if wall[2] == 1:
way.append('R')
if wall[3] == 1:
way.append('D')
come = move_list[len(move_list) - 1]
if come == 'L':
way.remove('R')
elif come == 'U':
way.remove('D')
elif come == 'R':
way.remove('L')
elif come == 'D':
way.remove('U')
while way:
mark.append((r, c, m, way.pop())) # 记录当前坐标和可行移动方向
if mark:
r, c, m, go = mark.pop()
del move_list[m:] # 删除回溯点之后的移动
else:
return False
m = m + 1
move_list.append(go)
if go == 'L':
c = c - 1
elif go == 'U':
r = r - 1
elif go == 'R':
c = c + 1
elif go == 'D':
r = r + 1
del move_list[0]
return move_list
测试
rows = int(input("Rows: "))
cols = int(input("Columns: "))
Map = build_twist(rows, cols)
plt.imshow(draw(rows, cols, Map), cmap='gray')
fig = plt.gcf()
fig.set_size_inches(cols/10/3, rows/10/3)
plt.gca().xaxis.set_major_locator(plt.NullLocator())
plt.gca().yaxis.set_major_locator(plt.NullLocator())
plt.subplots_adjust(top=1, bottom=0, right=1, left=0, hspace=0, wspace=0)
plt.margins(0, 0)
fig.savefig('aaa.png', format='png', transparent=True, dpi=300, pad_inches=0)
move = solve_backtrack(rows, cols, Map)
plt.imshow(draw_path(draw(rows, cols, Map), move), cmap='hot')
fig = plt.gcf()
fig.set_size_inches(cols/10/3, rows/10/3)
plt.gca().xaxis.set_major_locator(plt.NullLocator())
plt.gca().yaxis.set_major_locator(plt.NullLocator())
plt.subplots_adjust(top=1, bottom=0, right=1, left=0, hspace=0, wspace=0)
plt.margins(0, 0)
fig.savefig('bbb.png', format='png', transparent=True, dpi=300, pad_inches=0)
非常感谢你的阅读
大学的时候选择了自学python,工作了发现吃了计算机基础不好的亏,学历不行这是
没办法的事,只能后天弥补,于是在编码之外开启了自己的逆袭之路,不断的学习python核心知识,深入的研习计算机基础知识,整理好了,如果你也不甘平庸,那就与我一起在编码之外,不断成长吧!
其实这里不仅有技术,更有那些技术之外的东西,比如,如何做一个精致的程序员,而不是“屌丝”,程序员本身就是高贵的一种存在啊,难道不是吗?[点击加入]想做你自己想成为高尚人,加油!