(8)图像增强(Image Enhancement)- 常用空间域、频率域滤波算法
温习基本概念请移步博客:https://blog.csdn.net/yangtrees/article/details/8740933
常用空间域滤波算法:
- 均值滤波
- 中值滤波
常用频率域滤波算法:
- 理想低通滤波
- 高通滤波
- 巴特沃斯低通滤波
- DCT滤波
- 双边滤波
均值滤波算法:
#####################################################################
#####################################################################
import cv2
import math
#####################################################################
keep_processing = True;
camera_to_use = 0; # 0 if you have one camera, 1 or > 1 otherwise
#####################################################################
# this function is called as a call-back everytime the trackbar is moved
# (here we just do nothing)
def nothing(x):
pass
#####################################################################
# define video capture object
cap = cv2.VideoCapture();
# define display window name
windowName = "Live Camera Input"; # window name
windowName2 = "Mean Filtering"; # window name
windowName3 = "Non-Local Means (NLM) Filtering"; # window name
# if command line arguments are provided try to read video_name
# otherwise default to capture from attached H/W camera
if cap.open(camera_to_use):
# create window by name
cv2.namedWindow(windowName, cv2.WINDOW_AUTOSIZE);
cv2.namedWindow(windowName2, cv2.WINDOW_AUTOSIZE);
cv2.namedWindow(windowName3, cv2.WINDOW_AUTOSIZE);
# add some track bar controllers for settings
neighbourhood = 3;
cv2.createTrackbar("neighbourhood, N", windowName2, neighbourhood, 25, nothing);
while (keep_processing):
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# get parameters from track bars
neighbourhood = cv2.getTrackbarPos("neighbourhood, N", windowName2);
neighbourhood = max(3, neighbourhood);
# in opencv blur() performs filtering with a NxN kernel where each element has a weight of
# 1 / (N^2) - this is mean filtering
mean_img = cv2.blur(frame, (neighbourhood,neighbourhood), borderType=cv2.BORDER_DEFAULT);
# display image
cv2.imshow(windowName, frame);
cv2.imshow(windowName2, mean_img);
# start the event loop - essential
# cv2.waitKey() is a keyboard binding function (argument is the time in milliseconds).
# It waits for specified milliseconds for any keyboard event.
# If you press any key in that time, the program continues.
# If 0 is passed, it waits indefinitely for a key stroke.
# (bitwise and with 0xFF to extract least significant byte of multi-byte response)
key = cv2.waitKey(40) & 0xFF; # wait 40ms (i.e. 1000ms / 25 fps = 40 ms)
# It can also be set to detect specific key strokes by recording which key is pressed
# e.g. if user presses "x" then exit
if (key == ord('x')):
keep_processing = False;
# close all windows
cv2.destroyAllWindows()
else:
print("No usable camera connected.")
#####################################################################
中值滤波算法:
import cv2
import math
#####################################################################
keep_processing = True;
camera_to_use = 1; # 0 if you have one camera, 1 or > 1 otherwise
#####################################################################
# this function is called as a call-back everytime the trackbar is moved
# (here we just do nothing)
def nothing(x):
pass
#####################################################################
# define video capture object
cap = cv2.VideoCapture();
# define display window name
windowName = "Live Camera Input"; # window name
windowName2 = "Median Filtering"; # window name
# if command line arguments are provided try to read video_name
# otherwise default to capture from attached H/W camera
if cap.open(camera_to_use):
# create window by name
cv2.namedWindow(windowName, cv2.WINDOW_AUTOSIZE);
cv2.namedWindow(windowName2, cv2.WINDOW_AUTOSIZE);
# add some track bar controllers for settings
neighbourhood = 3;
cv2.createTrackbar("neighbourhood, N", windowName2, neighbourhood, 40, nothing);
while (keep_processing):
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# get parameter from track bars
neighbourhood = cv2.getTrackbarPos("neighbourhood, N", windowName2);
# check it is greater than 3 and odd
neighbourhood = max(3, neighbourhood);
if not(neighbourhood % 2):
neighbourhood = neighbourhood + 1;
# perform median filtering using NxN neighbourhood
median_img = cv2.medianBlur(frame, neighbourhood);
# display image
cv2.imshow(windowName, frame);
cv2.imshow(windowName2, median_img);
# start the event loop - essential
# cv2.waitKey() is a keyboard binding function (argument is the time in milliseconds).
# It waits for specified milliseconds for any keyboard event.
# If you press any key in that time, the program continues.
# If 0 is passed, it waits indefinitely for a key stroke.
# (bitwise and with 0xFF to extract least significant byte of multi-byte response)
key = cv2.waitKey(40) & 0xFF; # wait 40ms (i.e. 1000ms / 25 fps = 40 ms)
# It can also be set to detect specific key strokes by recording which key is pressed
# e.g. if user presses "x" then exit
if (key == ord('x')):
keep_processing = False;
# close all windows
cv2.destroyAllWindows()
else:
print("No usable camera connected.")
#####################################################################
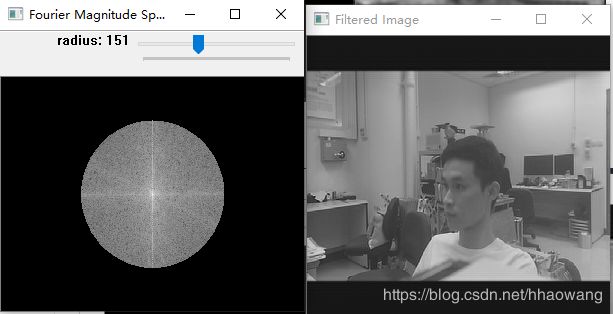
理想低通滤波算法:
#####################################################################
import cv2
import sys
import numpy as np
import math
#####################################################################
keep_processing = True;
camera_to_use = 1; # 0 if you have one camera, 1 or > 1 otherwise
#####################################################################
# create a simple low pass filter
def create_low_pass_filter(width, height, radius):
lp_filter = np.zeros((height, width, 2), np.float32);
cv2.circle(lp_filter, (width / 2, height / 2), radius, (1,1,1), thickness=-1)
return lp_filter
#####################################################################
# this function is called as a call-back everytime the trackbar is moved
# (here we just do nothing)
def nothing(x):
pass
#####################################################################
# define video capture object
cap = cv2.VideoCapture();
# define display window name
windowName = "Live Camera Input"; # window name
windowName2 = "Fourier Magnitude Spectrum"; # window name
windowName3 = "Filtered Image"; # window name
# if command line arguments are provided try to read video_name
# otherwise default to capture from attached H/W camera
if (((len(sys.argv) == 2) and (cap.open(str(sys.argv[1]))))
or (cap.open(camera_to_use))):
# create windows by name (as resizable)
cv2.namedWindow(windowName, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName2, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName3, cv2.WINDOW_NORMAL);
# add some track bar controllers for settings
radius = 25;
cv2.createTrackbar("radius", windowName2, radius, 400, nothing);
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# use this single frame to set up optimized DFT settings
hieght,width = gray_frame.shape;
nheight = cv2.getOptimalDFTSize(hieght);
nwidth = cv2.getOptimalDFTSize(width);
while (keep_processing):
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# start a timer (to see how long processing and display takes)
start_t = cv2.getTickCount();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# Performance of DFT calculation, via the FFT, is better for array sizes of power of two.
# Arrays whose size is a product of 2's, 3's, and 5's are also processed quite efficiently.
# Hence ee modify the size of the array tothe optimal size (by padding zeros) before finding DFT.
pad_right = nwidth - width;
pad_bottom = nheight - hieght;
nframe = cv2.copyMakeBorder(gray_frame,0,pad_bottom,0,pad_right,cv2.BORDER_CONSTANT, value = 0);
# perform the DFT and get complex output
dft = cv2.dft(np.float32(nframe),flags = cv2.DFT_COMPLEX_OUTPUT);
# shift it so that we the zero-frequency, F(0,0), DC component to the center of the spectrum.
dft_shifted = np.fft.fftshift(dft);
# perform low pass filtering
radius = cv2.getTrackbarPos("radius",windowName2);
hp_filter = create_low_pass_filter(nwidth, nheight, radius);
dft_filtered = cv2.mulSpectrums(dft_shifted, hp_filter, flags=0);
# shift it back to original quaderant ordering
dft = np.fft.fftshift(dft_filtered);
# recover the original image via the inverse DFT
filtered_img = cv2.dft(dft, flags = cv2.DFT_INVERSE);
# normalized the filtered image into 0 -> 255 (8-bit grayscale) so we can see the output
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(filtered_img[:,:,0]);
filtered_img_normalized = filtered_img[:,:,0] * (1.0/(maxVal-minVal)) + ((-minVal)/(maxVal-minVal));
filtered_img_normalized = np.uint8(filtered_img_normalized * 255);
# calculate the magnitude spectrum and log transform + scale it for visualization
magnitude_spectrum = np.log(cv2.magnitude(dft_filtered[:,:,0],dft_filtered[:,:,1]));
# create a 8-bit image to put the magnitude spectrum into
magnitude_spectrum_normalized = np.zeros((nheight,nwidth,1), np.uint8);
# normalized the magnitude spectrum into 0 -> 255 (8-bit grayscale) so we can see the output
cv2.normalize(np.uint8(magnitude_spectrum), magnitude_spectrum_normalized, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX);
# display images
cv2.imshow(windowName,gray_frame);
cv2.imshow(windowName2,magnitude_spectrum_normalized);
cv2.imshow(windowName3,filtered_img_normalized);
# stop timer and convert to ms. (to see how long processing and display takes)
stop_t = ((cv2.getTickCount() - start_t)/cv2.getTickFrequency()) * 1000;
# start the event loop - essential
# cv2.waitKey() is a keyboard binding function (argument is the time in milliseconds).
# It waits for specified milliseconds for any keyboard event.
# If you press any key in that time, the program continues.
# If 0 is passed, it waits indefinitely for a key stroke.
# (bitwise and with 0xFF to extract least significant byte of multi-byte response)
# here we use a wait time in ms. that takes account of processing time already used in the loop
key = cv2.waitKey(max(2, 40 - int(math.ceil(stop_t)))) & 0xFF; # wait 40ms (i.e. 1000ms / 25 fps = 40 ms)
# It can also be set to detect specific key strokes by recording which key is pressed
# e.g. if user presses "x" then exit
if (key == ord('x')):
keep_processing = False;
# close all windows
cv2.destroyAllWindows()
else:
print("No video file specified or camera connected.")
#####################################################################
效果图:

修改低通滤波器阈值:

DCT低通滤波器:
#####################################################################
# perform low pass filterings in DCT space of image frame
# from a video file specified on the command line (e.g. python FILE.py
# video_file) or from an attached web camera
#####################################################################
import cv2
import sys
import numpy as np
import math
#####################################################################
keep_processing = True;
camera_to_use = 0; # 0 if you have one camera, 1 or > 1 otherwise
#####################################################################
# create a simple low pass filter - DCT version (top left corner)
def create_low_pass_filter(width, height, radius):
lp_filter = np.zeros((height, width), np.float32);
cv2.circle(lp_filter, (0, 0), radius, (1,1,1), thickness=-1)
return lp_filter
#####################################################################
# "Currently dct supports even-size arrays (2, 4, 6 ...). For data
# analysis and approximation, you can pad the array when necessary.
# Also, the function performance depends very much, and not
# monotonically, on the array size (see getOptimalDFTSize() ). In the
# current implementation DCT of a vector of size N is calculated
# via DFT of a vector of size N/2 . Thus, the optimal DCT
# size N1 >= N can be calculated as:" - OpenCV manual 3.0
def getOptimalDCTSize(N):
return (2* cv2.getOptimalDFTSize(math.floor((N+1)/2)))
#####################################################################
# this function is called as a call-back everytime the trackbar is moved
# (here we just do nothing)
def nothing(x):
pass
#####################################################################
# define video capture object
cap = cv2.VideoCapture();
# define display window name
windowName = "Live Camera Input"; # window name
windowName2 = "DCT Co-efficients Spectrum"; # window name
windowName3 = "Filtered Image"; # window name
# if command line arguments are provided try to read video_name
# otherwise default to capture from attached H/W camera
if (((len(sys.argv) == 2) and (cap.open(str(sys.argv[1]))))
or (cap.open(camera_to_use))):
# create windows by name (as resizable)
cv2.namedWindow(windowName, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName2, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName3, cv2.WINDOW_NORMAL);
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# use this single frame to set up optimized DFT settings
hieght,width = gray_frame.shape;
nheight = getOptimalDCTSize(hieght);
nwidth = getOptimalDCTSize(width);
# add some track bar controllers for settings
radius = 25;
cv2.createTrackbar("radius", windowName2, radius, max(nheight,nwidth) * 2, nothing);
while (keep_processing):
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# start a timer (to see how long processing and display takes)
start_t = cv2.getTickCount();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# Performance of DCT calculation, via the DFT/FFT, is better for array sizes of power of two.
# Arrays whose size is a product of 2's, 3's, and 5's are also processed quite efficiently.
# Hence ee modify the size of the array tothe optimal size (by padding zeros) before finding DCT.
pad_right = nwidth - width;
pad_bottom = nheight - hieght;
nframe = cv2.copyMakeBorder(gray_frame,0,pad_bottom,0,pad_right,cv2.BORDER_CONSTANT, value = 0);
# perform the DCT
dct = cv2.dct(np.float32(nframe));
# perform low pass filtering
radius = cv2.getTrackbarPos("radius",windowName2);
lp_filter = create_low_pass_filter(nwidth, nheight, radius);
dct_filtered = cv2.multiply(dct, lp_filter);
# recover the original image via the inverse DCT
filtered_img = cv2.dct(dct_filtered, flags = cv2.DCT_INVERSE);
# normalized the filtered image into 0 -> 255 (8-bit grayscale) so we can see the output
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(filtered_img);
filtered_img_normalized = filtered_img * (1.0/(maxVal-minVal)) + ((-minVal)/(maxVal-minVal));
filtered_img_normalized = np.uint8(filtered_img_normalized * 255);
# calculate the DCT spectrum for visualization
# create a 8-bit image to put the magnitude spectrum into
dct_spectrum_normalized = np.zeros((nheight,nwidth,1), np.uint8);
# normalized the magnitude spectrum into 0 -> 255 (8-bit grayscale) so we can see the output
cv2.normalize(np.uint8(dct_filtered), dct_spectrum_normalized, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX);
# display images
cv2.imshow(windowName,gray_frame);
cv2.imshow(windowName2,dct_spectrum_normalized);
cv2.imshow(windowName3,filtered_img_normalized);
# stop timer and convert to ms. (to see how long processing and display takes)
stop_t = ((cv2.getTickCount() - start_t)/cv2.getTickFrequency()) * 1000;
# start the event loop - essential
# cv2.waitKey() is a keyboard binding function (argument is the time in milliseconds).
# It waits for specified milliseconds for any keyboard event.
# If you press any key in that time, the program continues.
# If 0 is passed, it waits indefinitely for a key stroke.
# (bitwise and with 0xFF to extract least significant byte of multi-byte response)
# here we use a wait time in ms. that takes account of processing time already used in the loop
key = cv2.waitKey(max(2, 40 - int(math.ceil(stop_t)))) & 0xFF; # wait 40ms (i.e. 1000ms / 25 fps = 40 ms)
# It can also be set to detect specific key strokes by recording which key is pressed
# e.g. if user presses "x" then exit
if (key == ord('x')):
keep_processing = False;
# close all windows
cv2.destroyAllWindows()
else:
print("No video file specified or camera connected.")
#####################################################################

巴德沃斯低通滤波器:
#####################################################################
# Example : perform butterworth low pass filtering in fourier space of
# image frame from a video file specified on the command line
# (e.g. python FILE.py video_file) or from an attached web camera
#####################################################################
import cv2
import sys
import numpy as np
import math
#####################################################################
keep_processing = True;
camera_to_use = 1; # 0 if you have one camera, 1 or > 1 otherwise
recompute_filter = True;
#####################################################################
# create a butterworth low pass filter
def create_butterworth_low_pass_filter(width, height, D, n):
lp_filter = np.zeros((height, width, 2), np.float32);
centre = (width / 2, height / 2);
# based on the forumla in lecture 8 (2015 version)
# see also HIPR2 on-line
for i in range(0, lp_filter.shape[1]): # image width
for j in range(0, lp_filter.shape[0]): # image height
radius = max(1, math.sqrt(math.pow((i - centre[0]), 2.0) + math.pow((j - centre[1]), 2.0)));
lp_filter[j,i] = 1 / (1 + math.pow((radius / D), (2 * n)));
return lp_filter
#####################################################################
# this function is called as a call-back everytime the trackbar is moved
# to signal we need to reconstruct the filter
def reset_butterworth_filter(_):
global recompute_filter;
recompute_filter = True;
return;
#####################################################################
# define video capture object
cap = cv2.VideoCapture();
# define display window name
windowName = "Live Camera Input"; # window name
windowName2 = "Fourier Magnitude Spectrum"; # window name
windowName3 = "Filtered Image"; # window name
windowName4 = "Butterworth Filter"; # window name
# if command line arguments are provided try to read video_name
# otherwise default to capture from attached H/W camera
if (((len(sys.argv) == 2) and (cap.open(str(sys.argv[1]))))
or (cap.open(camera_to_use))):
# create windows by name (as resizable)
cv2.namedWindow(windowName, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName2, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName3, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName4, cv2.WINDOW_NORMAL);
# add some track bar controllers for settings
radius = 5;
cv2.createTrackbar("radius", windowName4, radius, 100, reset_butterworth_filter);
order = 1;
cv2.createTrackbar("order", windowName4, order, 10, reset_butterworth_filter);
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# use this single frame to set up optimized DFT settings
hieght,width = gray_frame.shape;
nheight = cv2.getOptimalDFTSize(hieght);
nwidth = cv2.getOptimalDFTSize(width);
while (keep_processing):
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# start a timer (to see how long processing and display takes)
start_t = cv2.getTickCount();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# Performance of DFT calculation, via the FFT, is better for array sizes of power of two.
# Arrays whose size is a product of 2's, 3's, and 5's are also processed quite efficiently.
# Hence ee modify the size of the array tothe optimal size (by padding zeros) before finding DFT.
pad_right = nwidth - width;
pad_bottom = nheight - hieght;
nframe = cv2.copyMakeBorder(gray_frame,0,pad_bottom,0,pad_right,cv2.BORDER_CONSTANT, value = 0);
# perform the DFT and get complex output
dft = cv2.dft(np.float32(nframe),flags = cv2.DFT_COMPLEX_OUTPUT);
# shift it so that we the zero-frequency, F(0,0), DC component to the center of the spectrum.
dft_shifted = np.fft.fftshift(dft);
# perform low pass filtering
radius = cv2.getTrackbarPos("radius",windowName4);
order = cv2.getTrackbarPos("order",windowName4);
# butterworth is slow to construct so only do it when needed (i.e. trackbar changes)
if (recompute_filter):
lp_filter = create_butterworth_low_pass_filter(nwidth, nheight, radius, order);
recompute_filter = False;
dft_filtered = cv2.mulSpectrums(dft_shifted, lp_filter, flags=0);
# shift it back to original quaderant ordering
dft = np.fft.fftshift(dft_filtered);
# recover the original image via the inverse DFT
filtered_img = cv2.dft(dft, flags = cv2.DFT_INVERSE);
# normalized the filtered image into 0 -> 255 (8-bit grayscale) so we can see the output
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(filtered_img[:,:,0]);
filtered_img_normalized = filtered_img[:,:,0] * (1.0/(maxVal-minVal)) + ((-minVal)/(maxVal-minVal));
filtered_img_normalized = np.uint8(filtered_img_normalized * 255);
# calculate the magnitude spectrum and log transform + scale it for visualization
magnitude_spectrum = np.log(cv2.magnitude(dft_filtered[:,:,0],dft_filtered[:,:,1]));
# create a 8-bit image to put the magnitude spectrum into
magnitude_spectrum_normalized = np.zeros((nheight,nwidth,1), np.uint8);
# normalized the magnitude spectrum into 0 -> 255 (8-bit grayscale) so we can see the output
cv2.normalize(np.uint8(magnitude_spectrum), magnitude_spectrum_normalized, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX);
# display images
cv2.imshow(windowName,gray_frame);
cv2.imshow(windowName2,magnitude_spectrum_normalized);
cv2.imshow(windowName3,filtered_img_normalized);
cv2.imshow(windowName4,lp_filter[:,:,0] * 255);
# stop timer and convert to ms. (to see how long processing and display takes)
stop_t = ((cv2.getTickCount() - start_t)/cv2.getTickFrequency()) * 1000;
# start the event loop - essential
# cv2.waitKey() is a keyboard binding function (argument is the time in milliseconds).
# It waits for specified milliseconds for any keyboard event.
# If you press any key in that time, the program continues.
# If 0 is passed, it waits indefinitely for a key stroke.
# (bitwise and with 0xFF to extract least significant byte of multi-byte response)
# here we use a wait time in ms. that takes account of processing time already used in the loop
key = cv2.waitKey(max(2, 40 - int(math.ceil(stop_t)))) & 0xFF; # wait 40ms (i.e. 1000ms / 25 fps = 40 ms)
# It can also be set to detect specific key strokes by recording which key is pressed
# e.g. if user presses "x" then exit
if (key == ord('x')):
keep_processing = False;
# close all windows
cv2.destroyAllWindows()
else:
print("No video file specified or camera connected.")
#####################################################################
高通滤波器:
#####################################################################
import cv2
import sys
import numpy as np
import math
#####################################################################
keep_processing = True;
camera_to_use = 1; # 0 if you have one camera, 1 or > 1 otherwise
#####################################################################
# create a simple high pass filter
def create_high_pass_filter(width, height, radius):
hp_filter = np.ones((height, width, 2), np.float32);
cv2.circle(hp_filter, (width / 2, height / 2), radius, (0,0,0), thickness=-1)
return hp_filter
#####################################################################
# this function is called as a call-back everytime the trackbar is moved
# (here we just do nothing)
def nothing(x):
pass
#####################################################################
# define video capture object
cap = cv2.VideoCapture();
# define display window name
windowName = "Live Camera Input"; # window name
windowName2 = "Fourier Magnitude Spectrum"; # window name
windowName3 = "Filtered Image"; # window name
# if command line arguments are provided try to read video_name
# otherwise default to capture from attached H/W camera
if (((len(sys.argv) == 2) and (cap.open(str(sys.argv[1]))))
or (cap.open(camera_to_use))):
# create windows by name (as resizable)
cv2.namedWindow(windowName, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName2, cv2.WINDOW_NORMAL);
cv2.namedWindow(windowName3, cv2.WINDOW_NORMAL);
# add some track bar controllers for settings
radius = 25;
cv2.createTrackbar("radius", windowName2, radius, 200, nothing);
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# use this single frame to set up optimized DFT settings
hieght,width = gray_frame.shape;
nheight = cv2.getOptimalDFTSize(hieght);
nwidth = cv2.getOptimalDFTSize(width);
while (keep_processing):
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# start a timer (to see how long processing and display takes)
start_t = cv2.getTickCount();
# convert to grayscale
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY);
# Performance of DFT calculation, via the FFT, is better for array sizes of power of two.
# Arrays whose size is a product of 2's, 3's, and 5's are also processed quite efficiently.
# Hence ee modify the size of the array tothe optimal size (by padding zeros) before finding DFT.
pad_right = nwidth - width;
pad_bottom = nheight - hieght;
nframe = cv2.copyMakeBorder(gray_frame,0,pad_bottom,0,pad_right,cv2.BORDER_CONSTANT, value = 0);
# perform the DFT and get complex output
dft = cv2.dft(np.float32(nframe),flags = cv2.DFT_COMPLEX_OUTPUT);
# shift it so that we the zero-frequency, F(0,0), DC component to the center of the spectrum.
dft_shifted = np.fft.fftshift(dft);
# perform high pass filtering
radius = cv2.getTrackbarPos("radius",windowName2);
hp_filter = create_high_pass_filter(nwidth, nheight, radius);
dft_filtered = cv2.mulSpectrums(dft_shifted, hp_filter, flags=0);
# shift it back to original quaderant ordering
dft = np.fft.fftshift(dft_filtered);
# recover the original image via the inverse DFT
filtered_img = cv2.dft(dft, flags = cv2.DFT_INVERSE);
# normalized the filtered image into 0 -> 255 (8-bit grayscale) so we can see the output
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(filtered_img[:,:,0]);
filtered_img_normalized = filtered_img[:,:,0] * (1.0/(maxVal-minVal)) + ((-minVal)/(maxVal-minVal));
filtered_img_normalized = np.uint8(filtered_img_normalized * 255);
# calculate the magnitude spectrum and log transform + scale it for visualization
magnitude_spectrum = np.log(cv2.magnitude(dft_filtered[:,:,0],dft_filtered[:,:,1]));
# create a 8-bit image to put the magnitude spectrum into
magnitude_spectrum_normalized = np.zeros((nheight,nwidth,1), np.uint8);
# normalized the magnitude spectrum into 0 -> 255 (8-bit grayscale) so we can see the output
cv2.normalize(np.uint8(magnitude_spectrum), magnitude_spectrum_normalized, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX);
# display images
cv2.imshow(windowName,gray_frame);
cv2.imshow(windowName2,magnitude_spectrum_normalized);
cv2.imshow(windowName3,filtered_img_normalized);
# stop timer and convert to ms. (to see how long processing and display takes)
stop_t = ((cv2.getTickCount() - start_t)/cv2.getTickFrequency()) * 1000;
# start the event loop - essential
# cv2.waitKey() is a keyboard binding function (argument is the time in milliseconds).
# It waits for specified milliseconds for any keyboard event.
# If you press any key in that time, the program continues.
# If 0 is passed, it waits indefinitely for a key stroke.
# (bitwise and with 0xFF to extract least significant byte of multi-byte response)
# here we use a wait time in ms. that takes account of processing time already used in the loop
key = cv2.waitKey(max(2, 40 - int(math.ceil(stop_t)))) & 0xFF; # wait 40ms (i.e. 1000ms / 25 fps = 40 ms)
# It can also be set to detect specific key strokes by recording which key is pressed
# e.g. if user presses "x" then exit
if (key == ord('x')):
keep_processing = False;
# close all windows
cv2.destroyAllWindows()
else:
print("No video file specified or camera connected.")
#####################################################################
双边滤波器:
#####################################################################
# Example : gaussian and bi-lateral filtering on an image from an attached web camera
#####################################################################
import cv2
#####################################################################
keep_processing = True;
camera_to_use = 0; # 0 if you have one camera, 1 or > 1 otherwise
#####################################################################
# this function is called as a call-back everytime the trackbar is moved
# (here we just do nothing)
def nothing(x):
pass
#####################################################################
# define video capture object
cap = cv2.VideoCapture();
# define display window name
windowName = "Live Camera Input"; # window name
windowName2 = "Gaussian Smoothing"; # window name
windowName3 = "Bilaterial Filtering"; # window name
# if command line arguments are provided try to read video_name
# otherwise default to capture from attached H/W camera
if cap.open(camera_to_use):
# create window by name
cv2.namedWindow(windowName, cv2.WINDOW_AUTOSIZE);
cv2.namedWindow(windowName2, cv2.WINDOW_AUTOSIZE);
cv2.namedWindow(windowName3, cv2.WINDOW_AUTOSIZE);
# add some track bar controllers for settings Gaussian smoothing
neighbourhood = 3; # kernel_size = 3x3
cv2.createTrackbar("neighbourhood, N", windowName2, neighbourhood, 40, nothing);
sigma = 1;
cv2.createTrackbar("sigma", windowName2, sigma, 10, nothing);
# add some track bar controllers for settings bilateral smoothing
sigmaS = 10;
cv2.createTrackbar("sigmaS", windowName3, sigmaS, 25, nothing);
sigmaR = 10;
cv2.createTrackbar("sigmaR", windowName3, sigmaR, 25, nothing);
while (keep_processing):
# if video file successfully open then read frame from video
if (cap.isOpened):
ret, frame = cap.read();
# get parameter from track bars - Gaussian
neighbourhood = cv2.getTrackbarPos("neighbourhood, N", windowName2);
sigma = cv2.getTrackbarPos("sigma", windowName2);
# get parameter from track bars - bilateral
sigmaS = cv2.getTrackbarPos("sigmaS", windowName3);
sigmaR = cv2.getTrackbarPos("sigmaR", windowName3);
# check neighbourhood is greater than 3 and odd
neighbourhood = max(3, neighbourhood);
if not (neighbourhood % 2):
neighbourhood = neighbourhood + 1;
# perform Gaussian smoothing using NxN neighbourhood
smoothed_img = cv2.GaussianBlur(frame,
(neighbourhood, neighbourhood),
sigma,
sigma,
borderType=cv2.BORDER_REPLICATE);
# perform bilateral filtering using a neighbourhood
# calculated automatically from sigmaS
filtered_img = cv2.bilateralFilter(frame,
-1,
sigmaR,
sigmaS,
borderType=cv2.BORDER_REPLICATE);
# display image
cv2.imshow(windowName, frame);
cv2.imshow(windowName2, smoothed_img);
cv2.imshow(windowName3, filtered_img);
# start the event loop - essential
# cv2.waitKey() is a keyboard binding function (argument is the time in milliseconds).
# It waits for specified milliseconds for any keyboard event.
# If you press any key in that time, the program continues.
# If 0 is passed, it waits indefinitely for a key stroke.
# (bitwise and with 0xFF to extract least significant byte of multi-byte response)
key = cv2.waitKey(40) & 0xFF; # wait 40ms (i.e. 1000ms / 25 fps = 40 ms)
# It can also be set to detect specific key strokes by recording which key is pressed
# e.g. if user presses "x" then exit
if (key == ord('x')):
keep_processing = False;
# close all windows
cv2.destroyAllWindows()
else:
print("No usable camera connected.")
#####################################################################