Zynq-Linux移植学习笔记之31-用户自定义I2C驱动
1、背景介绍
板子上通过ZYNQ的I2C-0控制器连接了三片DBF芯片和一片Ti的226测功耗芯片,示意图如下:
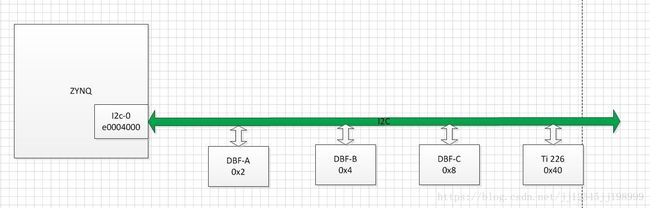
如上图所示,三块DBF芯片的I2C地址分别为2,4,8,Ti 226芯片的I2C地址为0x40.现在需要ZYNQ通过I2C总线读写这四块芯片的寄存器数值。
2、I2C时序说明
之前调试过cps1848 RapidIO交换芯片,想来既然都是i2c从设备,知道了slave的地址操作过程应该差不多,不过真正调试的时候才发现虽然这些设备都遵循I2C协议,但在i2c的读写时序上还是存在不同,下面将cps1848与dbf的i2c读写时序进行对比,Ti 226的类似。

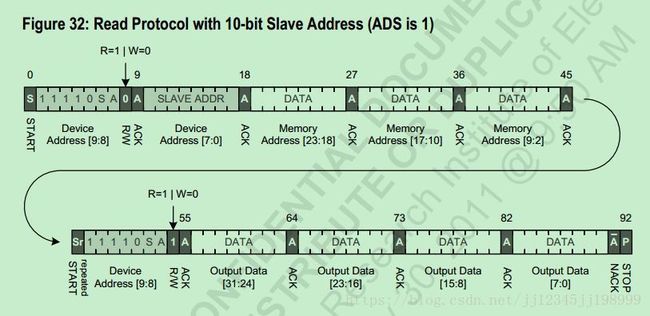


以上是从1848 datasheet中摘录出的i2c读写时序图,之前调试时采用的是7位地址,即后面两个图。
从图中可以得知,读操作时i2c master先发slave地址(加start共8bit),再发要读写的空间地址(即寄存器offset,共24bit),这两个部分组成第一个message.后一个message包括slave地址(8bit)和接收数据的缓冲区(32bit)。完成整个操作后表示读结束。对应代码如下:
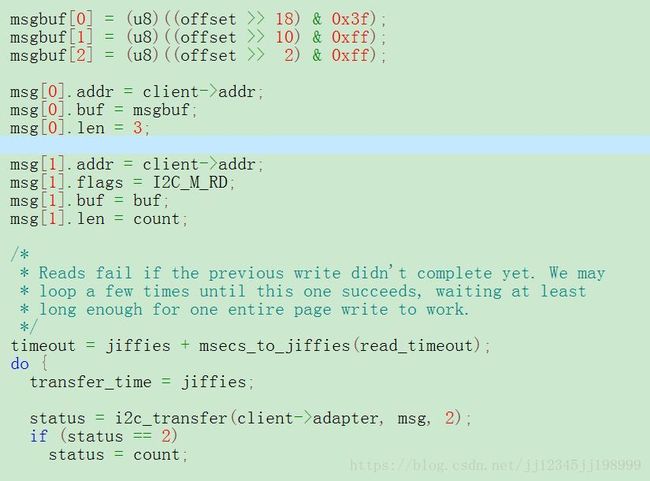
Msgbuf即对应offset,共24bit,msg即为上面提到的message,调用i2c_transfer()发送两个msg正好匹配1848的读时序图。
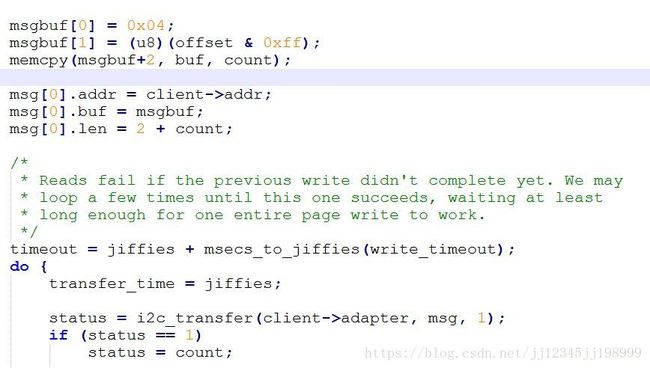
再来看写操作,先是一个slave地址(8bit),再24bit偏移量,然后是待写入的32bit共同组成一个message.代码如下:

从代码中可以看到,这里把要写入的数据和长度都放入msgbuf中,前面加上24bit offset,最后组装为一个msg发送出去。
搞清楚了i2c读写时序,针对不同芯片只需要根据datasheet时序关系进行代码修改即可,dbf芯片读写时序如下

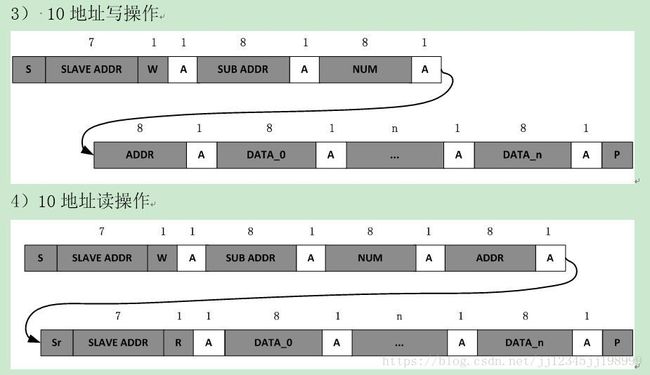
DBF芯片也支持7地址和10地址操作,显然这里选择7地址改动最小。和1848相比,这里的读操作是先8bit地址,然后8bit要读的数据长度,再8bit offset。通常要读的数据为32bit,所以NUM这里设为固定值0x04,代码改动如下:

要调整的地方就是msgbuf大小变为16bit,内容调整,msg[0]的len也设为2.
写操作也类似调整,代码如下:
Ti 226芯片也根据datasheet修改即可,这里不加赘述。
3、内核配置
将DBF驱动代码和226驱动代码编译进内核即可,这里图省事直接obj-y,dbf驱动名称忘了改,沿用1848了。
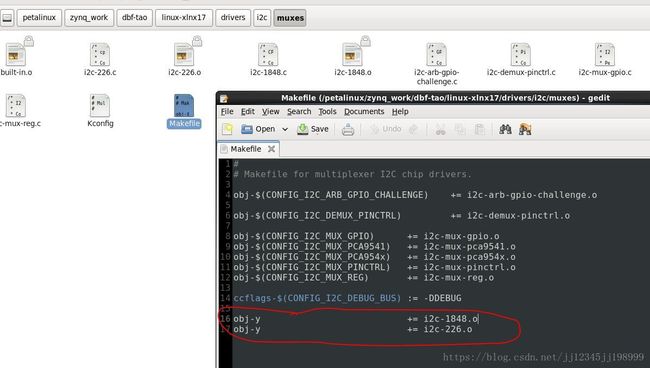
代码分别如下
/*
* CPS1848 bus driver
*
* Copyright (C) 2014 CGT Corp.
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; version 2 of the License.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*
*/
#define DEBUG
#include
#include
#include
#include
#include
#include
#include
/* Each client has this additional data */
#define USER_EEPROM_SIZE 0xFFFF48
#define USER_XFER_MAX_COUNT 0x8
/* Addresses to scan */
static const unsigned short cps1848_i2c[] = { 0x3, I2C_CLIENT_END };
static unsigned read_timeout = 25;
module_param(read_timeout, uint, 0);
MODULE_PARM_DESC(read_timeout, "Time (in ms) to try reads (default 25)");
static unsigned write_timeout = 25;
module_param(write_timeout, uint, 0);
MODULE_PARM_DESC(write_timeout, "Time (in ms) to try writes (default 25)");
struct cps1848_data {
struct mutex lock;
u8 *data;
};
static ssize_t cps1848_eeprom_read( struct i2c_client *client,
char *buf, unsigned offset, size_t count)
{
struct i2c_msg msg[2];
u8 msgbuf[4];
unsigned long timeout, transfer_time;
int status;
memset(msg, 0, sizeof(msg));
//msgbuf[0] = (u8)((offset >> 18) & 0x3f);
//msgbuf[1] = (u8)((offset >> 10) & 0xff);
//msgbuf[2] = (u8)((offset >> 2) & 0xff);
msgbuf[0] = 0x04;
msgbuf[1] = 0x00;
msg[0].addr = client->addr;
msg[0].buf = msgbuf;
msg[0].len = 2;
msg[1].addr = client->addr;
msg[1].flags = I2C_M_RD;
msg[1].buf = buf;
msg[1].len = count;
/*
* Reads fail if the previous write didn't complete yet. We may
* loop a few times until this one succeeds, waiting at least
* long enough for one entire page write to work.
*/
timeout = jiffies + msecs_to_jiffies(read_timeout);
do {
transfer_time = jiffies;
status = i2c_transfer(client->adapter, msg, 2);
if (status == 2)
status = count;
dev_dbg(&client->dev, "read %ld@0x%lx --> %d (%ld)\n",
count, (unsigned long)offset, status, jiffies);
if (status == count)
return count;
/* REVISIT: at HZ=100, this is sloooow */
msleep(1);
} while (time_before(transfer_time, timeout));
return -ETIMEDOUT;
}
static ssize_t cps1848_read(struct file *filp, struct kobject *kobj,
struct bin_attribute *bin_attr,
char *buf, loff_t offset, size_t count)
{
struct i2c_client *client = kobj_to_i2c_client(kobj);
struct cps1848_data *data = i2c_get_clientdata(client);
ssize_t retval = 0;
if (offset > USER_EEPROM_SIZE)
return 0;
if (offset + count > USER_EEPROM_SIZE)
count = USER_EEPROM_SIZE - offset;
mutex_lock(&data->lock);
dev_dbg(&client->dev, "cps1848 start read %ld@0x%lx ..\n", count, (unsigned long)offset);
while (count > 0) {
ssize_t status = count>USER_XFER_MAX_COUNT?USER_XFER_MAX_COUNT:count;
status = cps1848_eeprom_read(client, buf, offset, status);
if (status <= 0) {
if (retval == 0)
retval = status;
break;
}
buf += status;
offset += status;
count -= status;
retval += status;
}
dev_dbg(&client->dev, "cps1848 end read %ld@0x%lx !\n", retval, (unsigned long)offset);
mutex_unlock(&data->lock);
return retval;
}
static ssize_t cps1848_eeprom_write(
struct i2c_client *client,
struct cps1848_data *data,
char *buf, unsigned offset, size_t count)
{
struct i2c_msg msg[1];
u8 *msgbuf;
unsigned long timeout, transfer_time;
int status;
memset(msg, 0, sizeof(msg));
msgbuf = data->data;
// msgbuf[0] = (u8)((offset >> 18) & 0x3f);
// msgbuf[1] = (u8)((offset >> 10) & 0xff);
// msgbuf[2] = (u8)((offset >> 2) & 0xff);
msgbuf[0] = 0x04;
msgbuf[1] = 0x00;
memcpy(msgbuf+2, buf, count);
msg[0].addr = client->addr;
msg[0].buf = msgbuf;
msg[0].len = 2 + count;
/*
* Reads fail if the previous write didn't complete yet. We may
* loop a few times until this one succeeds, waiting at least
* long enough for one entire page write to work.
*/
timeout = jiffies + msecs_to_jiffies(write_timeout);
do {
transfer_time = jiffies;
status = i2c_transfer(client->adapter, msg, 1);
if (status == 1)
status = count;
dev_dbg(&client->dev, "write %ld@0x%lx --> %d (%ld)\n",
count, (unsigned long)offset, status, jiffies);
if (status == count)
return count;
/* REVISIT: at HZ=100, this is sloooow */
msleep(1);
} while (time_before(transfer_time, timeout));
return -ETIMEDOUT;
}
static ssize_t cps1848_write(struct file *filp, struct kobject *kobj,
struct bin_attribute *bin_attr,
char *buf, loff_t offset, size_t count)
{
struct i2c_client *client = kobj_to_i2c_client(kobj);
struct cps1848_data *data = i2c_get_clientdata(client);
ssize_t retval = 0;
if (offset > USER_EEPROM_SIZE)
return 0;
if (offset + count > USER_EEPROM_SIZE)
count = USER_EEPROM_SIZE - offset;
mutex_lock(&data->lock);
dev_dbg(&client->dev, "cps1848 start write %ld@0x%lx ..\n", count, (unsigned long)offset);
while (count > 0) {
ssize_t status = count>USER_XFER_MAX_COUNT?USER_XFER_MAX_COUNT:count;
status = cps1848_eeprom_write(client, data, buf, offset, status);
if (status <= 0) {
if (retval == 0)
retval = status;
break;
}
buf += status;
offset += status;
count -= status;
retval += status;
}
dev_dbg(&client->dev, "cps1848 end write %ld@0x%lx !\n", retval, (unsigned long)offset);
mutex_unlock(&data->lock);
return retval;
}
static struct bin_attribute user_eeprom_attr = {
.attr = {
.name = "eeprom",
.mode = (S_IRUSR | S_IWUSR),
},
.size = USER_EEPROM_SIZE,
.read = cps1848_read,
.write = cps1848_write,
};
/* Return 0 if detection is successful, -ENODEV otherwise */
static int cps1848_detect(struct i2c_client *client, struct i2c_board_info *info)
{
struct i2c_adapter *adapter = client->adapter;
if (!i2c_check_functionality(adapter, I2C_FUNC_SMBUS_BYTE_DATA)) {
dev_dbg(&client->dev, "cps1848 detect error for BYTE access !\n");
return -ENODEV;
}
strlcpy(info->type, "eeprom", I2C_NAME_SIZE);
return 0;
}
static int cps1848_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct i2c_adapter *adapter = client->adapter;
struct cps1848_data *data;
int err ;
dev_notice(&client->dev, "CPS1848 driver\n" );
if (!i2c_check_functionality(adapter, I2C_FUNC_SMBUS_BYTE_DATA)) {
dev_err(&client->dev, "CPS1848 driver: BYTE DATA not supported! \n" );
return -ENODEV;
}
if (!(data = kzalloc(sizeof(struct cps1848_data), GFP_KERNEL))) {
dev_err(&client->dev, "CPS1848 driver: Memory alloc error ! \n" );
return -ENOMEM;
}
/* alloc buffer */
data->data = devm_kzalloc(&client->dev, USER_XFER_MAX_COUNT + 8, GFP_KERNEL);
if (!data->data) {
dev_err(&client->dev, "CPS1848 driver: Memory alloc error ! \n" );
err = -ENOMEM;
goto exit_kfree;
}
/* Init real i2c_client */
i2c_set_clientdata(client, data);
mutex_init(&data->lock);
err = sysfs_create_bin_file(&client->dev.kobj, &user_eeprom_attr);
if (err) {
dev_err(&client->dev, "CPS1848 driver: sysfs create error ! \n" );
goto exit_kfree;
}
return 0;
exit_kfree:
if(data->data)
kfree(data->data);
kfree(data);
return err;
}
static int cps1848_remove(struct i2c_client *client)
{
struct cps1848_data *data = i2c_get_clientdata(client);
sysfs_remove_bin_file(&client->dev.kobj, &user_eeprom_attr);
if(data->data)
kfree(data->data);
kfree(data);
return 0;
}
static const struct i2c_device_id cps1848_id[] = {
{ "cps1848", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, cps1848_id);
static struct i2c_driver cps1848_driver = {
.driver = {
.name = "cps1848",
},
.probe = cps1848_probe,
.remove = cps1848_remove,
.id_table = cps1848_id,
.class = I2C_CLASS_SPD,
.detect = cps1848_detect,
.address_list = cps1848_i2c,
};
module_i2c_driver(cps1848_driver);
MODULE_AUTHOR("RobinLee");
MODULE_DESCRIPTION("CPS1848 driver");
MODULE_LICENSE("GPL");
/*
* cps226 bus driver
*
* Copyright (C) 2014 CGT Corp.
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; version 2 of the License.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*
*/
#define DEBUG
#include
#include
#include
#include
#include
#include
#include
/* Each client has this additional data */
#define USER_EEPROM_SIZE 0xFFFF48
#define USER_XFER_MAX_COUNT 0x8
/* Addresses to scan */
static const unsigned short cps226_i2c[] = { 0x3, I2C_CLIENT_END };
static unsigned read_timeout = 25;
module_param(read_timeout, uint, 0);
MODULE_PARM_DESC(read_timeout, "Time (in ms) to try reads (default 25)");
static unsigned write_timeout = 25;
module_param(write_timeout, uint, 0);
MODULE_PARM_DESC(write_timeout, "Time (in ms) to try writes (default 25)");
struct cps226_data {
struct mutex lock;
u8 *data;
};
static ssize_t cps226_eeprom_read( struct i2c_client *client,
char *buf, unsigned offset, size_t count)
{
struct i2c_msg msg[2];
u8 msgbuf[4];
unsigned long timeout, transfer_time;
int status;
memset(msg, 0, sizeof(msg));
msgbuf[0] = (u8)(offset & 0xff);
msg[0].addr = client->addr;
msg[0].buf = msgbuf;
msg[0].len = 1;
msg[1].addr = client->addr;
msg[1].flags = I2C_M_RD;
msg[1].buf = buf;
msg[1].len = count;
/*
* Reads fail if the previous write didn't complete yet. We may
* loop a few times until this one succeeds, waiting at least
* long enough for one entire page write to work.
*/
timeout = jiffies + msecs_to_jiffies(read_timeout);
do {
transfer_time = jiffies;
status = i2c_transfer(client->adapter, msg, 2);
if (status == 2)
status = count;
dev_dbg(&client->dev, "read %ld@0x%lx --> %d (%ld)\n",
count, (unsigned long)offset, status, jiffies);
if (status == count)
return count;
/* REVISIT: at HZ=100, this is sloooow */
msleep(1);
} while (time_before(transfer_time, timeout));
return -ETIMEDOUT;
}
static ssize_t cps226_read(struct file *filp, struct kobject *kobj,
struct bin_attribute *bin_attr,
char *buf, loff_t offset, size_t count)
{
struct i2c_client *client = kobj_to_i2c_client(kobj);
struct cps226_data *data = i2c_get_clientdata(client);
ssize_t retval = 0;
if (offset > USER_EEPROM_SIZE)
return 0;
if (offset + count > USER_EEPROM_SIZE)
count = USER_EEPROM_SIZE - offset;
mutex_lock(&data->lock);
dev_dbg(&client->dev, "cps226 start read %ld@0x%lx ..\n", count, (unsigned long)offset);
while (count > 0) {
ssize_t status = count>USER_XFER_MAX_COUNT?USER_XFER_MAX_COUNT:count;
status = cps226_eeprom_read(client, buf, offset, status);
if (status <= 0) {
if (retval == 0)
retval = status;
break;
}
buf += status;
offset += status;
count -= status;
retval += status;
}
dev_dbg(&client->dev, "cps226 end read %ld@0x%lx !\n", retval, (unsigned long)offset);
mutex_unlock(&data->lock);
return retval;
}
static ssize_t cps226_eeprom_write(
struct i2c_client *client,
struct cps226_data *data,
char *buf, unsigned offset, size_t count)
{
struct i2c_msg msg[1];
u8 *msgbuf;
unsigned long timeout, transfer_time;
int status;
memset(msg, 0, sizeof(msg));
msgbuf = data->data;
// msgbuf[0] = (u8)((offset >> 18) & 0x3f);
// msgbuf[1] = (u8)((offset >> 10) & 0xff);
// msgbuf[2] = (u8)((offset >> 2) & 0xff);
msgbuf[0] = (u8)(offset & 0xff);
memcpy(msgbuf+1, buf, count);
msg[0].addr = client->addr;
msg[0].buf = msgbuf;
msg[0].len = 1 + count;
/*
* Reads fail if the previous write didn't complete yet. We may
* loop a few times until this one succeeds, waiting at least
* long enough for one entire page write to work.
*/
timeout = jiffies + msecs_to_jiffies(write_timeout);
do {
transfer_time = jiffies;
status = i2c_transfer(client->adapter, msg, 1);
if (status == 1)
status = count;
dev_dbg(&client->dev, "write %ld@0x%lx --> %d (%ld)\n",
count, (unsigned long)offset, status, jiffies);
if (status == count)
return count;
/* REVISIT: at HZ=100, this is sloooow */
msleep(1);
} while (time_before(transfer_time, timeout));
return -ETIMEDOUT;
}
static ssize_t cps226_write(struct file *filp, struct kobject *kobj,
struct bin_attribute *bin_attr,
char *buf, loff_t offset, size_t count)
{
struct i2c_client *client = kobj_to_i2c_client(kobj);
struct cps226_data *data = i2c_get_clientdata(client);
ssize_t retval = 0;
if (offset > USER_EEPROM_SIZE)
return 0;
if (offset + count > USER_EEPROM_SIZE)
count = USER_EEPROM_SIZE - offset;
mutex_lock(&data->lock);
dev_dbg(&client->dev, "cps226 start write %ld@0x%lx ..\n", count, (unsigned long)offset);
while (count > 0) {
ssize_t status = count>USER_XFER_MAX_COUNT?USER_XFER_MAX_COUNT:count;
status = cps226_eeprom_write(client, data, buf, offset, status);
if (status <= 0) {
if (retval == 0)
retval = status;
break;
}
buf += status;
offset += status;
count -= status;
retval += status;
}
dev_dbg(&client->dev, "cps226 end write %ld@0x%lx !\n", retval, (unsigned long)offset);
mutex_unlock(&data->lock);
return retval;
}
static struct bin_attribute user_eeprom_attr = {
.attr = {
.name = "eeprom",
.mode = (S_IRUSR | S_IWUSR),
},
.size = USER_EEPROM_SIZE,
.read = cps226_read,
.write = cps226_write,
};
/* Return 0 if detection is successful, -ENODEV otherwise */
static int cps226_detect(struct i2c_client *client, struct i2c_board_info *info)
{
struct i2c_adapter *adapter = client->adapter;
if (!i2c_check_functionality(adapter, I2C_FUNC_SMBUS_BYTE_DATA)) {
dev_dbg(&client->dev, "cps226 detect error for BYTE access !\n");
return -ENODEV;
}
strlcpy(info->type, "eeprom", I2C_NAME_SIZE);
return 0;
}
static int cps226_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct i2c_adapter *adapter = client->adapter;
struct cps226_data *data;
int err ;
dev_notice(&client->dev, "cps226 driver\n" );
if (!i2c_check_functionality(adapter, I2C_FUNC_SMBUS_BYTE_DATA)) {
dev_err(&client->dev, "cps226 driver: BYTE DATA not supported! \n" );
return -ENODEV;
}
if (!(data = kzalloc(sizeof(struct cps226_data), GFP_KERNEL))) {
dev_err(&client->dev, "cps226 driver: Memory alloc error ! \n" );
return -ENOMEM;
}
/* alloc buffer */
data->data = devm_kzalloc(&client->dev, USER_XFER_MAX_COUNT + 8, GFP_KERNEL);
if (!data->data) {
dev_err(&client->dev, "cps226 driver: Memory alloc error ! \n" );
err = -ENOMEM;
goto exit_kfree;
}
/* Init real i2c_client */
i2c_set_clientdata(client, data);
mutex_init(&data->lock);
err = sysfs_create_bin_file(&client->dev.kobj, &user_eeprom_attr);
if (err) {
dev_err(&client->dev, "cps226 driver: sysfs create error ! \n" );
goto exit_kfree;
}
return 0;
exit_kfree:
if(data->data)
kfree(data->data);
kfree(data);
return err;
}
static int cps226_remove(struct i2c_client *client)
{
struct cps226_data *data = i2c_get_clientdata(client);
sysfs_remove_bin_file(&client->dev.kobj, &user_eeprom_attr);
if(data->data)
kfree(data->data);
kfree(data);
return 0;
}
static const struct i2c_device_id cps226_id[] = {
{ "cps226", 0 },
{ }
};
MODULE_DEVICE_TABLE(i2c, cps226_id);
static struct i2c_driver cps226_driver = {
.driver = {
.name = "cps226",
},
.probe = cps226_probe,
.remove = cps226_remove,
.id_table = cps226_id,
.class = I2C_CLASS_SPD,
.detect = cps226_detect,
.address_list = cps226_i2c,
};
module_i2c_driver(cps226_driver);
MODULE_AUTHOR("RobinLee");
MODULE_DESCRIPTION("cps226 driver");
MODULE_LICENSE("GPL");
4、devicetree配置
devicetree中需要配置四个从设备的地址,如下,dbf名称懒得改了:

/dts-v1/;
/ {
#address-cells = <0x1>;
#size-cells = <0x1>;
compatible = "xlnx,zynq-7000";
cpus {
#address-cells = <0x1>;
#size-cells = <0x0>;
cpu@0 {
compatible = "arm,cortex-a9";
device_type = "cpu";
reg = <0x0>;
clocks = <0x1 0x3>;
clock-latency = <0x3e8>;
cpu0-supply = <0x2>;
operating-points = <0xa4cb8 0xf4240 0x5265c 0xf4240>;
};
cpu@1 {
compatible = "arm,cortex-a9";
device_type = "cpu";
reg = <0x1>;
clocks = <0x1 0x3>;
};
};
fpga-full {
compatible = "fpga-region";
fpga-mgr = <0x3>;
#address-cells = <0x1>;
#size-cells = <0x1>;
ranges;
};
pmu@f8891000 {
compatible = "arm,cortex-a9-pmu";
interrupts = <0x0 0x5 0x4 0x0 0x6 0x4>;
interrupt-parent = <0x4>;
reg = <0xf8891000 0x1000 0xf8893000 0x1000>;
};
fixedregulator {
compatible = "regulator-fixed";
regulator-name = "VCCPINT";
regulator-min-microvolt = <0xf4240>;
regulator-max-microvolt = <0xf4240>;
regulator-boot-on;
regulator-always-on;
linux,phandle = <0x2>;
phandle = <0x2>;
};
amba {
u-boot,dm-pre-reloc;
compatible = "simple-bus";
#address-cells = <0x1>;
#size-cells = <0x1>;
interrupt-parent = <0x4>;
ranges;
adc@f8007100 {
compatible = "xlnx,zynq-xadc-1.00.a";
reg = <0xf8007100 0x20>;
interrupts = <0x0 0x7 0x4>;
interrupt-parent = <0x4>;
clocks = <0x1 0xc>;
xlnx,channels {
#address-cells = <1>;
#size-cells = <0>;
channel@0 {
reg = <0>;
};
channel@1 {
reg = <1>;
};
channel@2 {
reg = <2>;
};
channel@3 {
reg = <3>;
};
channel@4{
reg = <4>;
};
channel@5{
reg = <5>;
};
channel@6{
reg = <6>;
};
channel@7{
reg = <7>;
};
channel@8 {
reg = <8>;
};
channel@9 {
reg = <9>;
};
channel@a {
reg = <0xa>;
};
channel@b {
reg = <0xb>;
};
channel@c {
reg = <0xc>;
};
channel@d {
reg = <0xd>;
};
channel@e {
reg = <0xe>;
};
channel@f {
reg = <0xf>;
};
channel@10 {
reg = <0x10>;
};
};
};
gpio@e000a000 {
compatible = "xlnx,zynq-gpio-1.0";
#gpio-cells = <0x2>;
clocks = <0x1 0x2a>;
gpio-controller;
interrupt-controller;
#interrupt-cells = <0x2>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x14 0x4>;
reg = <0xe000a000 0x1000>;
};
i2c@e0004000 {
compatible = "cdns,i2c-r1p10";
status = "okay";
clocks = <0x1 0x26>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x19 0x4>;
reg = <0xe0004000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
clock-frequency = <0x61a80>;
cps1848@2 {
compatible = "cps1848";
reg = <0x2>;
};
cps1848@4 {
compatible = "cps1848";
reg = <0x4>;
};
cps1848@8 {
compatible = "cps1848";
reg = <0x8>;
};
cps226@40 {
compatible = "cps226";
reg = <0x40>;
};
};
i2c@e0005000 {
compatible = "cdns,i2c-r1p10";
status = "okay";
clocks = <0x1 0x27>;
interrupt-parent = <0x4>;
interrupts = <0x0 0x30 0x4>;
reg = <0xe0005000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
clock-frequency = <0x61a80>;
};
interrupt-controller@f8f01000 {
compatible = "arm,cortex-a9-gic";
#interrupt-cells = <0x3>;
interrupt-controller;
reg = <0xf8f01000 0x1000 0xf8f00100 0x100>;
num_cpus = <0x2>;
num_interrupts = <0x60>;
linux,phandle = <0x4>;
phandle = <0x4>;
};
cache-controller@f8f02000 {
compatible = "arm,pl310-cache";
reg = <0xf8f02000 0x1000>;
interrupts = <0x0 0x2 0x4>;
arm,data-latency = <0x3 0x2 0x2>;
arm,tag-latency = <0x2 0x2 0x2>;
cache-unified;
cache-level = <0x2>;
};
memory-controller@f8006000 {
compatible = "xlnx,zynq-ddrc-a05";
reg = <0xf8006000 0x1000>;
};
ocmc@f800c000 {
compatible = "xlnx,zynq-ocmc-1.0";
interrupt-parent = <0x4>;
interrupts = <0x0 0x3 0x4>;
reg = <0xf800c000 0x1000>;
};
serial@e0000000 {
compatible = "xlnx,xuartps", "cdns,uart-r1p8";
status = "okay";
clocks = <0x1 0x17 0x1 0x28>;
clock-names = "uart_clk", "pclk";
reg = <0xe0000000 0x1000>;
interrupts = <0x0 0x1b 0x4>;
device_type = "serial";
port-number = <0x0>;
};
spi@e0006000 {
compatible = "xlnx,zynq-spi-r1p6";
reg = <0xe0006000 0x1000>;
status = "okay";
interrupt-parent = <0x4>;
interrupts = <0x0 0x1a 0x4>;
clocks = <0x1 0x19 0x1 0x22>;
clock-names = "ref_clk", "pclk";
#address-cells = <0x1>;
#size-cells = <0x0>;
is-decoded-cs = <0x0>;
num-cs = <0x3>;
};
spi@e0007000 {
compatible = "xlnx,zynq-spi-r1p6";
reg = <0xe0007000 0x1000>;
status = "okay";
interrupt-parent = <0x4>;
interrupts = <0x0 0x31 0x4>;
clocks = <0x1 0x1a 0x1 0x23>;
clock-names = "ref_clk", "pclk";
#address-cells = <0x1>;
#size-cells = <0x0>;
is-decoded-cs = <0x0>;
num-cs = <0x3>;
flash@0 {
compatible = "micron,n25q128a11","jedec,spi-nor";
reg = <0x1>;
spi-max-frequency = <0x9EF21B0>;
spi-tx-bus-width = <0x1>;
spi-rx-bus-width = <0x1>;
#address-cells = <0x1>;
#size-cells = <0x1>;
partition@dbf {
label = "spi-flash";
reg = <0x0 0x1000000>;
};
};
};
spi@e000d000 {
clock-names = "ref_clk", "pclk";
clocks = <0x1 0xa 0x1 0x2b>;
compatible = "xlnx,zynq-qspi-1.0";
status = "okay";
interrupt-parent = <0x4>;
interrupts = <0x0 0x13 0x4>;
reg = <0xe000d000 0x1000>;
#address-cells = <0x1>;
#size-cells = <0x0>;
is-dual = <0x1>;
num-cs = <0x1>;
};
ethernet@e000b000 {
compatible = "xlnx,ps7-ethernet-1.00.a";
reg = <0xe000b000 0x1000>;
status = "okay";
interrupt-parent = <0x3>;
interrupts = <0x0 0x16 0x4>;
clocks = <0x1 0xd 0x1 0x1e>;
clock-names = "ref_clk", "aper_clk";
#address-cells = <0x1>;
#size-cells = <0x0>;
enet-reset = <0x4 0x2f 0x0>;
local-mac-address = [00 0a 35 00 00 00];
phy-mode = "rgmii";
phy-handle = <0x5>;
xlnx,eth-mode = <0x1>;
xlnx,has-mdio = <0x1>;
xlnx,ptp-enet-clock = <0x69f6bcb>;
mdio {
#address-cells = <0x1>;
#size-cells = <0x0>;
phy@0 {
compatible = "marvell,88e1111";
device_type = "ethernet-phy";
reg = <0x4>;
linux,phandle = <0x7>;
phandle = <0x7>;
};
};
};
slcr@f8000000 {
#address-cells = <0x1>;
#size-cells = <0x1>;
compatible = "xlnx,zynq-slcr", "syscon", "simple-mfd";
reg = <0xf8000000 0x1000>;
ranges;
linux,phandle = <0x5>;
phandle = <0x5>;
clkc@100 {
#clock-cells = <0x1>;
compatible = "xlnx,ps7-clkc";
fclk-enable = <0x1>;
clock-output-names = "armpll", "ddrpll", "iopll", "cpu_6or4x", "cpu_3or2x", "cpu_2x", "cpu_1x", "ddr2x", "ddr3x", "dci", "lqspi", "smc", "pcap", "gem0", "gem1", "fclk0", "fclk1", "fclk2", "fclk3", "can0", "can1", "sdio0", "sdio1", "uart0", "uart1", "spi0", "spi1", "dma", "usb0_aper", "usb1_aper", "gem0_aper", "gem1_aper", "sdio0_aper", "sdio1_aper", "spi0_aper", "spi1_aper", "can0_aper", "can1_aper", "i2c0_aper", "i2c1_aper", "uart0_aper", "uart1_aper", "gpio_aper", "lqspi_aper", "smc_aper", "swdt", "dbg_trc", "dbg_apb";
reg = <0x100 0x100>;
ps-clk-frequency = <0x2faf080>;
linux,phandle = <0x1>;
phandle = <0x1>;
};
rstc@200 {
compatible = "xlnx,zynq-reset";
reg = <0x200 0x48>;
#reset-cells = <0x1>;
syscon = <0x5>;
};
pinctrl@700 {
compatible = "xlnx,pinctrl-zynq";
reg = <0x700 0x200>;
syscon = <0x5>;
};
};
dmac@f8003000 {
compatible = "arm,pl330", "arm,primecell";
reg = <0xf8003000 0x1000>;
interrupt-parent = <0x4>;
interrupt-names = "abort", "dma0", "dma1", "dma2", "dma3", "dma4", "dma5", "dma6", "dma7";
interrupts = <0x0 0xd 0x4 0x0 0xe 0x4 0x0 0xf 0x4 0x0 0x10 0x4 0x0 0x11 0x4 0x0 0x28 0x4 0x0 0x29 0x4 0x0 0x2a 0x4 0x0 0x2b 0x4>;
#dma-cells = <0x1>;
#dma-channels = <0x8>;
#dma-requests = <0x4>;
clocks = <0x1 0x1b>;
clock-names = "apb_pclk";
};
devcfg@f8007000 {
compatible = "xlnx,zynq-devcfg-1.0";
interrupt-parent = <0x4>;
interrupts = <0x0 0x8 0x4>;
reg = <0xf8007000 0x100>;
clocks = <0x1 0xc 0x1 0xf 0x1 0x10 0x1 0x11 0x1 0x12>;
clock-names = "ref_clk", "fclk0", "fclk1", "fclk2", "fclk3";
syscon = <0x5>;
linux,phandle = <0x3>;
phandle = <0x3>;
};
efuse@f800d000 {
compatible = "xlnx,zynq-efuse";
reg = <0xf800d000 0x20>;
};
timer@f8f00200 {
compatible = "arm,cortex-a9-global-timer";
reg = <0xf8f00200 0x20>;
interrupts = <0x1 0xb 0x301>;
interrupt-parent = <0x4>;
clocks = <0x1 0x4>;
};
timer@f8001000 {
interrupt-parent = <0x4>;
interrupts = <0x0 0xa 0x4 0x0 0xb 0x4 0x0 0xc 0x4>;
compatible = "cdns,ttc";
clocks = <0x1 0x6>;
reg = <0xf8001000 0x1000>;
};
timer@f8002000 {
interrupt-parent = <0x4>;
interrupts = <0x0 0x25 0x4 0x0 0x26 0x4 0x0 0x27 0x4>;
compatible = "cdns,ttc";
clocks = <0x1 0x6>;
reg = <0xf8002000 0x1000>;
};
timer@f8f00600 {
interrupt-parent = <0x4>;
interrupts = <0x1 0xd 0x301>;
compatible = "arm,cortex-a9-twd-timer";
reg = <0xf8f00600 0x20>;
clocks = <0x1 0x4>;
};
watchdog@f8005000 {
clocks = <0x1 0x2d>;
compatible = "cdns,wdt-r1p2";
interrupt-parent = <0x4>;
interrupts = <0x0 0x9 0x1>;
reg = <0xf8005000 0x1000>;
timeout-sec = <0xa>;
};
};
chosen {
bootargs = "earlycon";
stdout-path = "serial0:115200n8";
};
aliases {
ethernet0 = "/amba/ethernet@e000b000";
serial0 = "/amba/serial@e0000000";
spi0 = "/amba/spi@e000d000";
spi1 = "/amba/spi@e0006000";
spi2 = "/amba/spi@e0007000";
};
memory {
device_type = "memory";
reg = <0x0 0x40000000>;
};
};
5、应用示例
应用可以参考1848那样提供读写寄存器接口函数,这里要注意数据高低位转换问题,是否需要使用htonl函数,不同的芯片要求不一样。
DBF芯片代码如下:
/*
* cps1848.h
*
* Created on: 2018年9月8日
* Author: Administrator
*/
#ifndef SRC_CPS1848_H_
#define SRC_CPS1848_H_
int Init_1848();
unsigned int get_1848_reg(int num,unsigned int offset);
void set_1848_reg(int num,unsigned int offset, unsigned int data);
#endif /* SRC_CPS1848_H_ */
/*
* Copyright (c) 2016 CGT Co., Ltd.
*
* Authors: Robin Lee
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program;
*
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "cps1848.h"
/*---------------------------------------------------------------------------------------------------------------------------------------------------
* global vars
*/
#define FP_DEV_1 "/sys/class/i2c-dev/i2c-0/device/0-0002/eeprom"
#define FP_DEV_2 "/sys/class/i2c-dev/i2c-0/device/0-0004/eeprom"
#define FP_DEV_3 "/sys/class/i2c-dev/i2c-0/device/0-0008/eeprom"
static int global_fd_1 = -1;
static int global_fd_2 = -1;
static int global_fd_3 = -1;
//operations of cps1848
int fd_initial(int num)
{
int fd = -1;
/*
Open modem device for reading and writing and not as controlling tty
because we don't want to get killed if linenoise sends CTRL-C.
*/
if(num==0)
{
printf("Open '%s' .. ", FP_DEV_1);
fd = open(FP_DEV_1, O_RDWR );
}
else if(num==1)
{
printf("Open '%s' .. ", FP_DEV_2);
fd = open(FP_DEV_2, O_RDWR );
}
else if(num==2)
{
printf("Open '%s' .. ", FP_DEV_3);
fd = open(FP_DEV_3, O_RDWR );
}
else
{
printf("Open error.\n");
return -1;
}
if (fd <0) {
printf("failed (err = %d)\n", fd);
return -1;
}
printf("Done\n");
return fd;
}
int fd_exit(int fd,int num)
{
if(num==1)
{
printf("Close '%s' .. ", FP_DEV_1);
}
else if(num==2)
{
printf("Close '%s' .. ", FP_DEV_2);
}
else
{
printf("Close '%s' .. ", FP_DEV_3);
}
close(fd);
printf("Done\n");
return 0;
}
/*---------------------------------------------------------------------------------------------------------------------------------------------------
* get_1848_reg, set_1848_reg
*/
unsigned int get_1848_reg(int num,unsigned int offset)
{
unsigned int value = 0xffff;
unsigned int ans=0;
int fd=-1;
if(num==0)
{
fd=global_fd_1;
}
else if(num==1)
{
fd=global_fd_2;
}
else if( num==2 )
{
fd=global_fd_3;
}
else
{
printf("get_dbf_reg::Invalid param !\n");
return 0;
}
if (fd<0) {
printf("Invalid device handle !\n");
return value;
}
if( lseek(fd, offset, SEEK_SET) == (off_t) -1 ) {
printf("failed for seek to offset 0x%x !\n", offset);
return value;
}
if ( read(fd, &value, sizeof(value)) != sizeof(value)) {
printf("failed for read from offset 0x%x !\n", offset);
return value;
}
//ans=htonl(value);
return value;
}
void set_1848_reg(int num,unsigned int offset, unsigned int data)
{
unsigned int value = data;
int fd=-1;
if(num==0)
{
fd=global_fd_1;
}
else if(num==1)
{
fd=global_fd_2;
}
else if( num==2 )
{
fd=global_fd_3;
}
else
{
printf("set_dbf_reg::Invalid param !\n");
return;
}
if (fd<0) {
printf("Invalid device handle !\n");
return ;
}
if( lseek(fd, offset, SEEK_SET) == (off_t) -1 ) {
printf("failed for seek to offset 0x%x !\n", offset);
return ;
}
if ( write(fd, &value, sizeof(value)) != sizeof(value)) {
// printf("failed for write from offset 0x%x !\n", offset);
return ;
}
return ;
}
unsigned int regtoul(const char *str)
{
int cbase = 10;
if(str[0]=='0'&&(str[1]=='x'||str[1]=='X')) {
cbase = 16;
}
return strtoul(str, NULL, cbase);
}
int Init_1848()
{
global_fd_1 = fd_initial(0);
global_fd_2 = fd_initial(1);
global_fd_3 = fd_initial(2);
if (global_fd_1<0) {
printf("\n Invalid First dbf device ! \n");
return -1;
}
if (global_fd_2<0) {
printf("\n Invalid Second dbf device ! \n");
return -1;
}
if (global_fd_3<0) {
printf("\n Invalid Third dbf device ! \n");
return -1;
}
return 0;
}
Ti 226芯片读写接口如下
/*
* cps1848.h
*
* Created on: 2018年9月8日
* Author: Administrator
*/
#ifndef SRC_CPS226_H_
#define SRC_CPS226_H_
int Init_226();
unsigned int get_226_reg(unsigned int offset);
void set_226_reg(unsigned int offset, unsigned int data);
#endif /* SRC_CPS1848_H_ */
/*
* Copyright (c) 2016 CGT Co., Ltd.
*
* Authors: Robin Lee
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program;
*
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "cps226.h"
/*---------------------------------------------------------------------------------------------------------------------------------------------------
* global vars
*/
#define FP_DEV "/sys/class/i2c-dev/i2c-0/device/0-0040/eeprom"
static int global_fd = -1;
//operations of cps1848
int fd_initial_226()
{
int fd = -1;
/*
Open modem device for reading and writing and not as controlling tty
because we don't want to get killed if linenoise sends CTRL-C.
*/
printf("Open '%s' .. ", FP_DEV);
fd = open(FP_DEV, O_RDWR );
if (fd <0) {
printf("failed (err = %d)\n", fd);
return -1;
}
printf("Done\n");
return fd;
}
int fd_exit_226(int fd)
{
close(fd);
printf("Done\n");
return 0;
}
/*---------------------------------------------------------------------------------------------------------------------------------------------------
* get_1848_reg, set_1848_reg
*/
unsigned int get_226_reg(unsigned int offset)
{
unsigned int value = 0xffff;
unsigned int ans=0;
int fd=-1;
fd=global_fd;
if (fd<0) {
printf("Invalid device handle !\n");
return value;
}
if( lseek(fd, offset, SEEK_SET) == (off_t) -1 ) {
printf("failed for seek to offset 0x%x !\n", offset);
return value;
}
if ( read(fd, &value, sizeof(value)) != sizeof(value)) {
printf("failed for read from offset 0x%x !\n", offset);
return value;
}
ans=htonl(value);
return ans>>16;
}
void set_226_reg(unsigned int offset, unsigned int data)
{
unsigned int value = data;
int fd=-1;
fd=global_fd;
if (fd<0) {
printf("Invalid device handle !\n");
return ;
}
if( lseek(fd, offset, SEEK_SET) == (off_t) -1 ) {
printf("failed for seek to offset 0x%x !\n", offset);
return ;
}
if ( write(fd, &value, sizeof(value)) != sizeof(value)) {
// printf("failed for write from offset 0x%x !\n", offset);
return ;
}
return ;
}
unsigned int regtoul_226(const char *str)
{
int cbase = 10;
if(str[0]=='0'&&(str[1]=='x'||str[1]=='X')) {
cbase = 16;
}
return strtoul(str, NULL, cbase);
}
int Init_226()
{
global_fd = fd_initial_226();
if (global_fd<0)
{
printf("\n Invalid 226 device ! \n");
return -1;
}
return 0;
}
6、测试说明
Linux启动过程中能看到驱动正确加载,显然设备都找到了。

启动应用后能读出DBF芯片原来的ID,并根据槽位号配置新的ID

代码如下:
/*
* config_dbf.c
*
* Created on: 2018年8月17日
* Author: Administrator
*/
#include "config_dbf.h"
#include "gpio.h"
#include "cps1848.h"
extern unsigned int ga_chass;
int config_dbf_id()
{
unsigned int _data;
u32 chip_id;
printf("Change dbf id start\n");
printf("------------Set DBFA ID Register------------\n");
_data=get_1848_reg(0,0);
printf("orignial DBFA ID = 0x%x\n",_data);
chip_id = (ga_chass<<4) | 0x1;
set_1848_reg(0,0,chip_id);
_data=get_1848_reg(0,0);
printf("config DBFA ID = 0x%x\n",_data);
printf("------------Set DBFB ID Register------------\n");
_data=get_1848_reg(1,0);
printf("orignial DBFB ID = 0x%x\n",_data);
chip_id = (ga_chass<<4) | 0x2;
set_1848_reg(1,0,chip_id);
_data=get_1848_reg(1,0);
printf("config DBFB ID = 0x%x\n",_data);
printf("------------Set DBFC ID Register------------\n");
_data=get_1848_reg(2,0);
printf("orignial DBFC ID = 0x%x\n",_data);
chip_id = (ga_chass<<4) | 0x3;
set_1848_reg(2,0,chip_id);
_data=get_1848_reg(2,0);
printf("config DBFC ID = 0x%x\n",_data);
return 0;
}
int read_dbf_id()
{
unsigned int _data;
_data=get_1848_reg(0,0);
printf("DBFA ID = 0x%x\n",_data);//true data is 1002
_data=get_1848_reg(1,0);
printf("DBFB ID = 0x%x\n",_data);//true data is 1003
_data=get_1848_reg(2,0);
printf("DBFC ID = 0x%x\n",_data);//true data is 1004
return 0;
}
int change_dbf_uart(int id)
{
if(id==0)
{
SetGpioReg(GPIO_UAET_SELECT_BASE_ADDR,0x0,0);
}
else if(id==1)
{
SetGpioReg(GPIO_UAET_SELECT_BASE_ADDR,0x0,1);
}
else
{
SetGpioReg(GPIO_UAET_SELECT_BASE_ADDR,0x0,2);
}
return 0;
}
#if 0
int bit_226()
{
unsigned int val32;
unsigned short val16;
unsigned int _data;
float TempData;
int Status;
int ret=0;
ret=IICRead_Reg(IIC_SLAVE_ADDR_226,0x05,&_data);
if(ret<0)
{
goto error;
}
ret=IICWrite_Reg(IIC_SLAVE_ADDR_226,0x05,0x1400);
if(ret<0)
{
goto error;
}
ret=IICRead_Reg(IIC_SLAVE_ADDR_226,0x05,&_data);
if(ret<0)
{
goto error;
}
ret=IICWrite_Reg(IIC_SLAVE_ADDR_226,0x02,0x1400);
if(ret<0)
{
goto error;
}
ret=IICRead_Reg(IIC_SLAVE_ADDR_226,0x05,&_data);
if(ret<0)
{
goto error;
}
val32=_data;
val16=(val32)&0xFFFF;
ret=IICRead_Reg(IIC_SLAVE_ADDR_226,0x02,&_data);
if(ret<0)
{
goto error;
}
val32=_data;
val16=(val32)&0xFFFF;
TempData = val16*1.0/1000.0;
printf("bus voltage is %f V.\n", TempData);
ret=IICRead_Reg(IIC_SLAVE_ADDR_226,0x04,&_data);
if(ret<0)
{
goto error;
}
val32=_data;
val16=(val32)&0xFFFF;
TempData = val16*1.0/1000.0;
printf("bus current is %f A.\n", TempData);
if(TempData>=15.0)
{
printf("-----safe_rst because of Current----\n");
SetGpioReg(GPIO_DBF_RESET_ADDR,0x0,1);
SetGpioReg(GPIO_DBF_RESET_ADDR,0x0,0);
}
ret=IICRead_Reg(IIC_SLAVE_ADDR_226,0x03,&_data);
if(ret<0)
{
goto error;
}
val32=_data;
val16=(val32)&0xFFFF;
TempData = val16*25.0/1000.0;
printf("power is %f W.\n", TempData);
return 0;
error:
return -1;
}
#endif
Ti 226芯片也能读出功耗了

读功耗代码如下:
#include
#include "bit.h"
#include "config_dbf.h"
#include "gpio.h"
#include "cps226.h"
extern unsigned int g_temp[10];
extern unsigned int g_vcc[9];
extern unsigned int g_vcc_aux[16];
void Show_226_bit()
{
unsigned int _data,val32;
unsigned short val16;
float temp;
_data=get_226_reg(0x05);
set_226_reg(0x05,0x14);
_data=get_226_reg(0x05);
set_226_reg(0x02,0x14);
val32=get_226_reg(0x05);
val16=val32&0xffff;
val32 = get_226_reg(0x02);
val16 = (val32)&0xFFFF;
temp = val16*1.25/1000.0;
printf("bus voltage is %.3f V. \n",temp);
val32 = get_226_reg(0x04);
val16 = (val32)&0xFFFF;
temp = val16*1.0/1000.0;
printf("Current is %.3f A. \n", temp);
if(temp>=15)
{
printf("Warning!!! DBF Current Amp Alarm! Reset DBF NOW!!!\n");
SetGpioReg(GPIO_DBF_RESET_ADDR,0,0x1);
SetGpioReg(GPIO_DBF_RESET_ADDR,0,0x0);
}
val32 = get_226_reg(0x03);
val16 = (val32)&0xFFFF ;
temp = val16*25.0/1000.0;
printf("Power is %.3f W. \r\n", temp);
} 至此I2C驱动调试结束。