FluxWeakening_MTPA_FOC
FluxWeakening_MTPA_FOC
1.什么是弱磁
2.磁链和速度
3.MTPA
4.Flux_Weakening
最近做了一些永磁同步电动机的模型仿真,有重新读了几篇之前收藏并标记为A+的优秀论文,想着趁着余热赶紧记录下来方便日后查看一番。
1.什么是弱磁
对于永磁同步电机(PMSM)来说从字面理解弱磁-减小当前运行工况下或者说转速下对应的永磁体磁链值,这么做的好处就是为了拓宽(PMSM)调速范围,使得电机运行速度维度变大。
2.磁链和速度
那么为什么说弱磁后就可以使调速范围拓宽呢?浅显的讲就是一个公式的问题,电机在高速运行时相对于感抗,电阻的电压可以忽略不计了。如公式1、2和公式3所示:


通过观察电压限制椭圆方程可以发现,w1可以提取出来到等式左边,那么只有等式右边的值越小,转速w1才能越大。而等式三个部分都是平方项,哪一个都大于零,注意观察第二项有可以操作的空间。然而电感参数是电机固有参数,捉摸不透,所以不好控制其来使得右边第二项值降低。但是可以通过使id为负值来降低等式右边的值使得转速在电压圆内得到升高。升到最高即右边第二项等式为0,这时候id电流完全在负的id轴成为了特征电流点。
所以说有弱磁升速的和加负id电流弱磁的说法。
3.MTPA
MTPA是咋会事儿呢,为什么总是和MTPV,弱磁一起出现呢,那么和弱磁到低有没有关联呢?

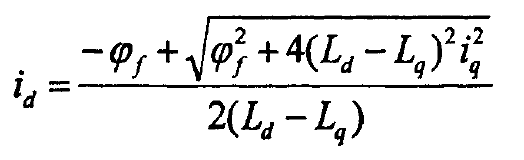
官方称呼MTPA为最大转矩电流控制,就是下电流极限圆下每一个转矩点都可以用最小的DQ电流去实现。比如VCU给一个扭矩,通过MTPA算法直接就能得到当前扭矩对应电流环下的DQ轴电流。那么在一般自己的仿真中可以通过以下公式来理解。

那么在实际车用电机的标定过程中,例如通过电流环1A每个点进行转矩的标定,包括park,ipark系数的调节,转矩阶跃测试等。测试数据利用MATLAB脚本生成2维的电感,电流表。题外话,我知道的国内其实电机标定对于日美差距明显,电流点的间隔较大,标定时的电压平台只有一个等等。优点是标定的速度较快,通常对商用车来讲一般不会因为标定结果而导致现场出问题。
到这里有了公式法和标定法构建MTPA的概念,那么刚才说为什么MTPA和MTPV总一起出现呢?在我狭隘的理解中,可将电机从稳态运行到深度弱磁分为三个阶段。第一阶段电流环可以理解为电压环的弟弟。当电压环大于电流环时(哥哥不在时),电机当前限制仅为电流不超过电流极限圆。弟弟装作自己是老大,将所有出转矩的电流控制在自己的范围内。也就是在电流圆内给定任意衡转矩都立刻有最小对应电流,也就是对自己地盘有绝对掌控能力。第二阶段当转速升高到达基速时,作为小弟的电流环有些支撑不住了,只能让出扭矩对应电流点沿着电流极限圆上恒转矩曲线AB运行了。第三阶段,当转速再升高超过基速时,这时候达到电压极限圆了,此时大哥也也点撑不住了,所以必须采取弱磁算法来使在高转速下电流工作点依然在电压圆内,电流工作点沿着BC运行,维持系统稳定运行此为MTPV。
4.Flux_Weakening
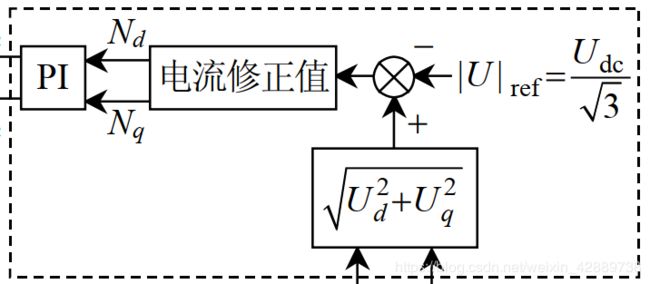
弱磁其实是上个问题中电机运行第二阶段和第三阶段。在第二阶段,恒转矩区。随着转速升高,沿着MTPA与MTPV之间的恒扭矩曲线运行。第三阶段,更高转速下沿着MTPV运行,指导特征电流点。在弱磁算法里,有一个概念-电压利用率是非常重要的,通常超过100%系统就要失控了。(下图是一个MTPA和弱磁系统的控制框图,公式都比较详细,有兴趣的可以自己搭一下)

 其中弱磁区域通过判定电压降落方向和恒转矩方向夹角来确定
其中弱磁区域通过判定电压降落方向和恒转矩方向夹角来确定

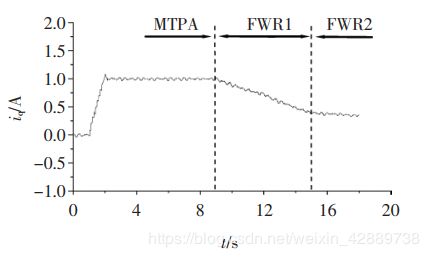
 通过观察弱磁电流可以发现,随着转速升高,弱磁深度增强,-id的值越来大。
通过观察弱磁电流可以发现,随着转速升高,弱磁深度增强,-id的值越来大。
 通过观察弱磁电流可以发现,随着转速升高,弱磁深度增强,iq的值越来小。
通过观察弱磁电流可以发现,随着转速升高,弱磁深度增强,iq的值越来小。
 下图是做的模型的三相电流等图片,先调节的电流环后调节转速环PI。通过加扭运行可以看到电流环波形趋近正弦。
下图是做的模型的三相电流等图片,先调节的电流环后调节转速环PI。通过加扭运行可以看到电流环波形趋近正弦。



在对知识总结的过程中其实也是温习的过程,小子初出茅庐能力尚浅且本文仅供自己日后翻阅,字里行间定存在一定问题,另如蒙有幸得到前辈指点,感激之至。