58--FPGA vivado 两路信号相位差估算
DDS1:20.915MHz,相位偏移为0
DDS2:20.915MHz,相位偏移为pi(可调)
DDS3:20MHz
实验任务:求DDS2和DDS1两路信号的相位差
低通滤波器:
coe文件:
; XILINX CORE Generator™Distributed Arithmetic FIR filter coefficient (.COE) File
; Generated by MATLAB® 9.2 and the DSP System Toolbox 9.4.
; Generated on: 11-Jun-2020 10:12:58
Radix = 16;
Coefficient_Width = 16;
CoefData = 03c3,
0e4e,
2211,
3cd8,
5755,
67f6,
67f6,
5755,
3cd8,
2211,
0e4e,
03c3;

f1=20.915MHz,
f0=20MHz
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2020/06/10 17:13:03
// Design Name:
// Module Name: lpfct
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module lpfct(
input clk,
input s_axis_config_tvalid_dds2,
input s_axis_data_tvalid_fir,
input [15:0]poff2,
input s_axis_cartesian_tvalid,
output [31:0]multda1,
output [31:0]multda2,
output [39:0]firout1,
output [39:0]firout2,
output [39:0]firout3,
output [39:0]firout4,
output [15:0]ct1,
output [15:0]ct2,
output [16:0]obj,
output reg [16:0]fix_down
);
wire [15:0]cos1,cos2,cos3,sin3;
wire [31:0]multda3,multda4;
wire m_axis_phase_tvalid_dds1;
wire m_axis_data_tvalid_dds1;
wire [15:0]m_axis_phase_tdata_dds1;
dds1 your_instance_name (
.aclk(clk), // input wire aclk
.m_axis_data_tvalid( m_axis_data_tvalid_dds1), // output wire m_axis_data_tvalid
.m_axis_data_tdata(cos1), // output wire [15 : 0] m_axis_data_tdata
.m_axis_phase_tvalid(m_axis_phase_tvalid_dds1), // output wire m_axis_phase_tvalid
.m_axis_phase_tdata(m_axis_phase_tdata_dds1) // output wire [15 : 0] m_axis_phase_tdata
);
wire m_axis_data_tvalid_dds2;
dds2 dds_2 (
.aclk(clk), // input wire aclk
.s_axis_config_tvalid(s_axis_config_tvalid_dds2), // input wire s_axis_config_tvalid
.s_axis_config_tdata(poff2), // input wire [15 : 0] s_axis_config_tdata
.m_axis_data_tvalid(m_axis_data_tvalid_dds2), // output wire m_axis_data_tvalid
.m_axis_data_tdata(cos2) // output wire [15 : 0] m_axis_data_tdata
);
/*dds2 ddds(
.aclk(clk), // input wire aclk
.m_axis_data_tvalid(m_axis_data_tvalid_dds2), // output wire m_axis_data_tvalid
.m_axis_data_tdata(cos2) // output wire [15 : 0] m_axis_data_tdata
);*/
wire m_axis_data_tvalid_dds3sin;
wire m_axis_data_tvalid_dds3cos;
wire m_axis_phase_tvalid_sin3;
wire m_axis_phase_tvalid_cos3;
wire [15:0]m_axis_phase_tdata_sin3;
dds3_sin abc(
.aclk(clk), // input wire aclk
.m_axis_data_tvalid(m_axis_data_tvalid_dds3sin), // output wire m_axis_data_tvalid
.m_axis_data_tdata(sin3), // output wire [15 : 0] m_axis_data_tdata
.m_axis_phase_tvalid(m_axis_phase_tvalid_sin3), // output wire m_axis_phase_tvalid
.m_axis_phase_tdata(m_axis_phase_tdata_sin3) // output wire [15 : 0] m_axis_phase_tdata
);
wire m_axis_data_tvalid_sin3;
dds_3cos abc2 (
.aclk(clk), // input wire aclk
.m_axis_data_tvalid(m_axis_data_tvalid_dds3cos), // output wire m_axis_data_tvalid
.m_axis_data_tdata(cos3) // output wire [15 : 0] m_axis_data_tdata
);
mult_gen_0 mult (
.CLK(clk), // input wire CLK
.A(cos1), // input wire [15 : 0] A
.B(cos3), // input wire [15 : 0] B
.P(multda1) // output wire [31 : 0] P
);
mult_gen_0 mult2 (
.CLK(clk), // input wire CLK
.A(cos1), // input wire [15 : 0] A
.B(-sin3+1'b1), // input wire [15 : 0] B
.P(multda2) // output wire [31 : 0] P
);
mult_gen_0 mult3 (
.CLK(clk), // input wire CLK
.A(cos2), // input wire [15 : 0] A
.B(cos3), // input wire [15 : 0] B
.P(multda3) // output wire [31 : 0] P
);
mult_gen_0 mult4 (
.CLK(clk), // input wire CLK
.A(cos2), // input wire [15 : 0] A
.B(-sin3+1'b1), // input wire [15 : 0] B
.P(multda4) // output wire [31 : 0] P
);
wire s_axis_data_tready_fir1,s_axis_data_tready_fir2,s_axis_data_tready_fir3,s_axis_data_tready_fir4;
wire m_axis_data_tvalid_fir1,m_axis_data_tvalid_fir2,m_axis_data_tvalid_fir3,m_axis_data_tvalid_fir4;
fir_compiler_0 fir1 (
.aclk(clk), // input wire aclk
.s_axis_data_tvalid(s_axis_data_tvalid_fir), // input wire s_axis_data_tvalid
.s_axis_data_tready(s_axis_data_tready_fir1), // output wire s_axis_data_tready
.s_axis_data_tdata(multda1[30:15]), // input wire [15 : 0] s_axis_data_tdata
.m_axis_data_tvalid(m_axis_data_tvalid_fir1), // output wire m_axis_data_tvalid
.m_axis_data_tdata(firout1) // output wire [39 : 0] m_axis_data_tdata
);
fir_compiler_0 fir2 (
.aclk(clk), // input wire aclk
.s_axis_data_tvalid(s_axis_data_tvalid_fir), // input wire s_axis_data_tvalid
.s_axis_data_tready(s_axis_data_tready_fir2), // output wire s_axis_data_tready
.s_axis_data_tdata(multda2[30:15]), // input wire [15 : 0] s_axis_data_tdata
.m_axis_data_tvalid(m_axis_data_tvalid_fir2), // output wire m_axis_data_tvalid
.m_axis_data_tdata(firout2) // output wire [39 : 0] m_axis_data_tdata
);
fir_compiler_0 fir3 (
.aclk(clk), // input wire aclk
.s_axis_data_tvalid(s_axis_data_tvalid_fir), // input wire s_axis_data_tvalid
.s_axis_data_tready(s_axis_data_tready_fir3), // output wire s_axis_data_tready
.s_axis_data_tdata(multda3[30:15]), // input wire [15 : 0] s_axis_data_tdata
.m_axis_data_tvalid(m_axis_data_tvalid_fir3), // output wire m_axis_data_tvalid
.m_axis_data_tdata(firout3) // output wire [39 : 0] m_axis_data_tdata
);
fir_compiler_0 fir4 (
.aclk(clk), // input wire aclk
.s_axis_data_tvalid(s_axis_data_tvalid_fir), // input wire s_axis_data_tvalid
.s_axis_data_tready(s_axis_data_tready_fir4), // output wire s_axis_data_tready
.s_axis_data_tdata(multda4[30:15]), // input wire [15 : 0] s_axis_data_tdata
.m_axis_data_tvalid(m_axis_data_tvalid_fir4), // output wire m_axis_data_tvalid
.m_axis_data_tdata(firout4) // output wire [39 : 0] m_axis_data_tdata
);
wire m_axis_dout_tvalid_cor1,m_axis_dout_tvalid_cor2;
cordic_0 cor1 (
.aclk(clk), // input wire aclk
.s_axis_cartesian_tvalid(s_axis_cartesian_tvalid), // input wire s_axis_cartesian_tvalid
.s_axis_cartesian_tdata({firout2[39:24],firout1[39:24]}), // input wire [31 : 0] s_axis_cartesian_tdata
.m_axis_dout_tvalid(m_axis_dout_tvalid_cor1), // output wire m_axis_dout_tvalid
.m_axis_dout_tdata(ct1) // output wire [15 : 0] m_axis_dout_tdata
);
cordic_0 cor2 (
.aclk(clk), // input wire aclk
.s_axis_cartesian_tvalid(s_axis_cartesian_tvalid), // input wire s_axis_cartesian_tvalid
.s_axis_cartesian_tdata({firout4[39:24],firout3[39:24]}), // input wire [31 : 0] s_axis_cartesian_tdata
.m_axis_dout_tvalid(m_axis_dout_tvalid_cor2), // output wire m_axis_dout_tvalid
.m_axis_dout_tdata(ct2) // output wire [15 : 0] m_axis_dout_tdata
);
c_addsub_0 sub (
.A(ct2), // input wire [15 : 0] A
.B(ct1), // input wire [15 : 0] B
.CLK(clk), // input wire CLK
.S(obj) // output wire [16 : 0] S
);
always@(posedge clk)begin
if(obj[16]==1'b0)
begin
if(obj==17'd0)begin
fix_down <= 17'b0;
end
else begin
fix_down<=obj;
end
end
else begin
if(obj[15:0]>16'b011_0010_1111_1000)begin
fix_down <= 17'b0011_0010_0100_00001 + obj+ 17'b0011_0010_0100_00001;
end
end
end
endmodule
```csharp
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2020/06/10 18:31:33
// Design Name:
// Module Name: tbtst
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module tbtst(
);
reg clk;
reg s_axis_config_tvalid_dds2;
reg s_axis_data_tvalid_fir;
reg [15:0]poff2;
reg s_axis_cartesian_tvalid;
wire [31:0]multda2;
wire [31:0]multda1;
wire [39:0]firout1;
wire [39:0]firout2;
wire [39:0]firout3;
wire [39:0]firout4;
wire [15:0]ct1,ct2;
wire [16:0]obj;
wire [16:0]fix_down;
lpfct u1(.clk(clk),.s_axis_config_tvalid_dds2(s_axis_config_tvalid_dds2),.poff2(poff2),
.multda2(multda2),.multda1(multda1),.s_axis_data_tvalid_fir(s_axis_data_tvalid_fir),.firout1(firout1),
.firout2(firout2),.firout3(firout3),.firout4(firout4),.s_axis_cartesian_tvalid(s_axis_cartesian_tvalid),
.ct1(ct1),.ct2(ct2),.obj(obj),.fix_down(fix_down)
);
initial begin
clk<=1'b0;
s_axis_config_tvalid_dds2<=1'b1;
s_axis_data_tvalid_fir<=1'b1;
s_axis_cartesian_tvalid<=1'b1;
poff2<=16'd32768;
#60000 poff2<=16'd16384;
end
always #5 clk<=~clk;
endmodule
仿真波形:

相位控制字为2^15时(相位宽度为16),相位差为0011.0010001101001=3.1378,接近pi
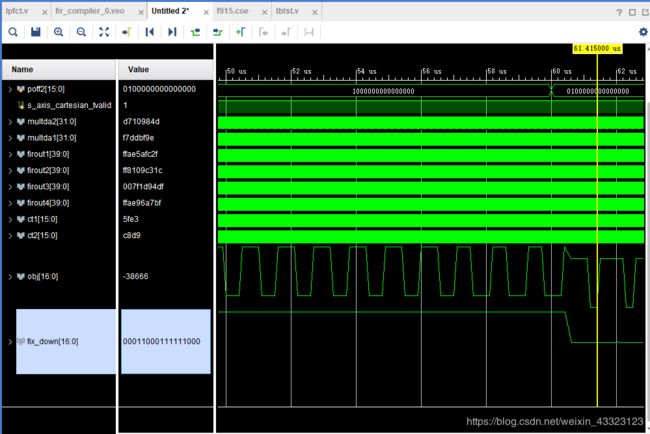
相位控制字为2^14时,相位差为1.56与pi/2=1.57相近。
文章参考
https://blog.csdn.net/qq_39809425/article/details/94211249
我是仿照这篇博客来完成的…不过原理分析是按照更简易的数学方法来写的。