深蓝学院视觉SLAM第二次习题
第二次习题来啦,线性代数和矩阵分析忘的也太快了
1.熟悉 Eigen 矩阵运算
本次习题,你需要使⽤ Eigen 库,编写程序,求解⼀个线性⽅程组。为此,你需要先了解⼀些有关线性⽅程组数值解法的原理。设线性⽅程 Ax = b,在 A 为⽅阵的前提下,请回答以下问题:
- 在什么条件下,x 有解且唯⼀?
A满秩,行列式不为0,r(A|b)=r(A)
- ⾼斯消元法的原理是什么?
通过用初等行变换将增广矩阵化为行阶梯阵,然后通过回带求解线性方程组的解。
- QR 分解的原理是什么?
任意一个满秩矩阵可唯一分解成一个正规正交矩阵Q与上三角形矩阵R A= QR
- Cholesky 分解的原理是什么?
Cholesky 分解是把一个实对称正定的矩阵表示成一个下三角矩阵L和其转置的乘积的分解。
一个实对称矩阵A正定,即存在可逆矩阵C,使得 A=C.transpose()*C
- 编程实现 A 为 100 × 100 随机矩阵时,⽤ QR 和 Cholesky 分解求 x 的程序。你可以参考本次课⽤到的 useEigen 例程。
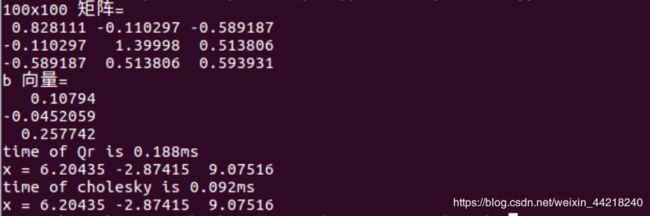
Cholesky 对对称正定矩阵才有效,所以需要转化一下,100x100的矩阵看不出效果,所以试了一下3x3 的矩阵
#include v_Nd=MatrixXd::Random(3,1);
Matrix<double,Dynamic,Dynamic> matrix_NN;
matrix_NN=matrix_pNN.transpose()*matrix_pNN;
cout<<"100x100 矩阵=\n"<<matrix_NN<<endl;
cout<<"b 向量=\n"<<v_Nd<<endl;
clock_t time_stt=clock();
//QR
Matrix<double,Dynamic,1> x=matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout<<"time of Qr is "<<1000*(clock()-time_stt)/(double)CLOCKS_PER_SEC<<"ms"<<endl;
cout<<"x ="<<x.transpose()<<endl;
//cholesky
time_stt=clock();
x=matrix_NN.ldlt().solve(v_Nd);
cout<<"time of cholesky is "<<1000*(clock()-time_stt)/(double)CLOCKS_PER_SEC<<"ms"<<endl;
cout<<"x ="<<x.transpose()<<endl;
return 0;
}
3x3矩阵的结果可以看出QR分解需要的时间大于cholesky的时间
2.几何运算练习
设有⼩萝⼘ 1 ⼀号和⼩萝⼘⼆号位于世界坐标系中。⼩萝⼘⼀号的位姿为:q 1 = [0.55,0.3,0.2,0.2],t 1 =[0.7,1.1,0.2] T (q 的第⼀项为实部)。这⾥的 q 和 t 表达的是 T cw ,也就是世界到相机的变换关系。⼩萝⼘⼆号的位姿为 q 2 =[−0.1,0.3,−0.7,0.2],t 2 = [−0.1,0.4,0.8] T 。现在,⼩萝⼘⼀号看到某个点在⾃⾝的坐标系下,坐标为 p 1 = [0.5,−0.1,0.2] T ,求该向量在⼩萝⼘⼆号坐标系下的坐标。请编程实现此事,并提交你的程序。
提⽰:
- 四元数在使⽤前需要归⼀化。
- 请注意 Eigen 在使⽤四元数时的虚部和实部顺序。
- 参考答案为 p 2 = [1.08228,0.663509,0.686957] T 。你可以⽤它验证程序是否正确。
#include
3.旋转的表达
手打公式真的太麻烦了,只能简单的写了,后面的证明题就用手写吧
1.证明:
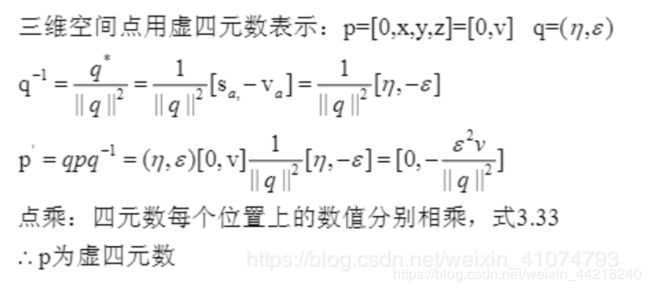
2.
四元数的实部是一维,虚部是三维
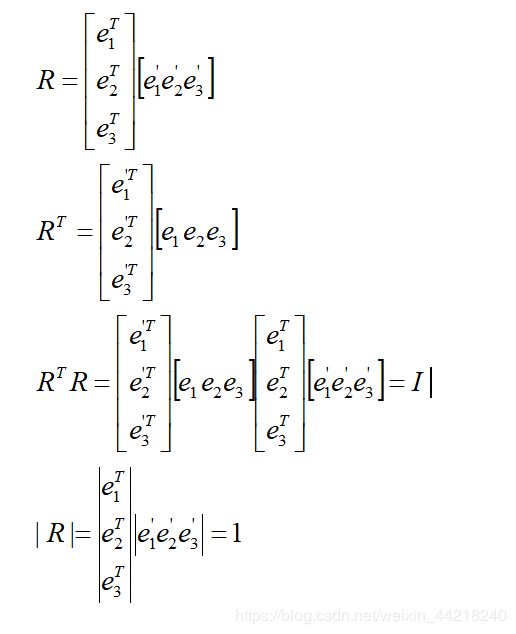
3.证明
本来想放上手写照片的,但是看上去不好看(颜控)搬运了他人的结果哈
方法一:
原文推导链接
方法2
4.罗德里格斯公式的证明
一个证明很详细的博客
https://www.cnblogs.com/jingrui/p/9712461.html
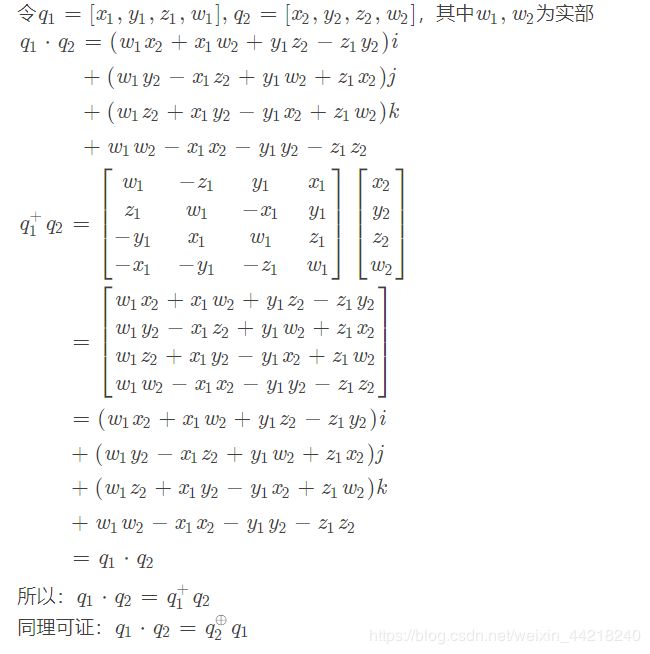
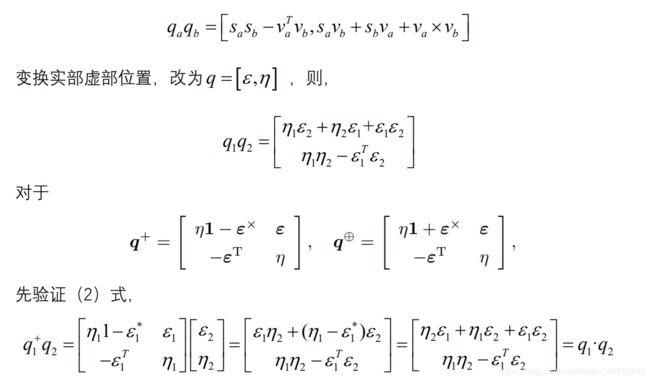
5.四元数运算性质的验证
1:
2:

6.熟悉 C++11
#include C++11新特性
序列for循环
在C++中for循环可以使用类似java的简化的for循环,可以用于遍历数组,容器,string以及由begin和end函数定义的序列(即有Iterator)。
新的关键字auto
C++11中引入auto第一种作用是为了自动类型推导
auto的自动类型推导,用于从初始化表达式中推断出变量的数据类型。通过auto的自动类型推导,可以大大简化我们的编程工作,auto实际上实在编译时对变量进行了类型推导,所以不会对程序的运行效率造成不良影响。另外,似乎auto并不会影响编译速度,因为编译时本来也要右侧推导然后判断与左侧是否匹配。
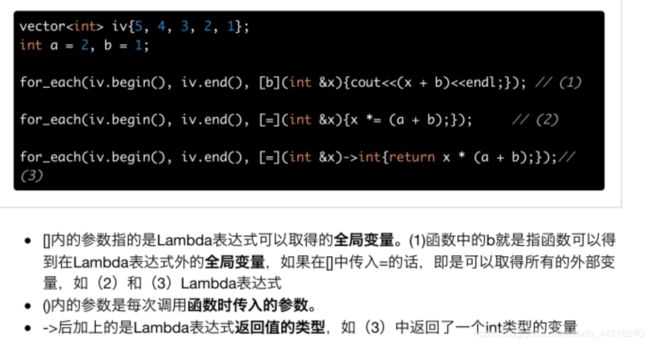
Lambda表达式
lambda表达式类似Javascript中的闭包,它可以用于创建并定义匿名的函数对象,以简化编程工作。
Lambda的语法如下:
[函数对象参数](操作符重载函数参数)->返回值类型{函数体}
更加优雅的初始化方法
在引入C++11之前,只有数组能使用初始化列表,其他容器想要使用初始化列表,只能用以下方法:
终于完成这一节了,数学的内容好多呀,C++11还需要多看看。(最后检查的时候发现把图片都粘错了位置,还好看到了)