机器学习系列2-回归案例研究
Regression:Case Study
如果本文对你有帮助,请给我的github打个star叭,上面附有全系列目录和内容!
更多优质内容欢迎关注我的微信公众号“Sakura的知识库”:

回归-案例研究
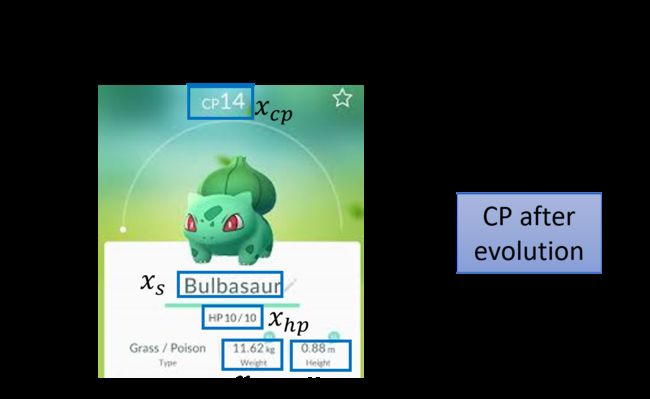
问题的导入:预测宝可梦的CP值
Estimating the Combat Power(CP) of a pokemon after evolution
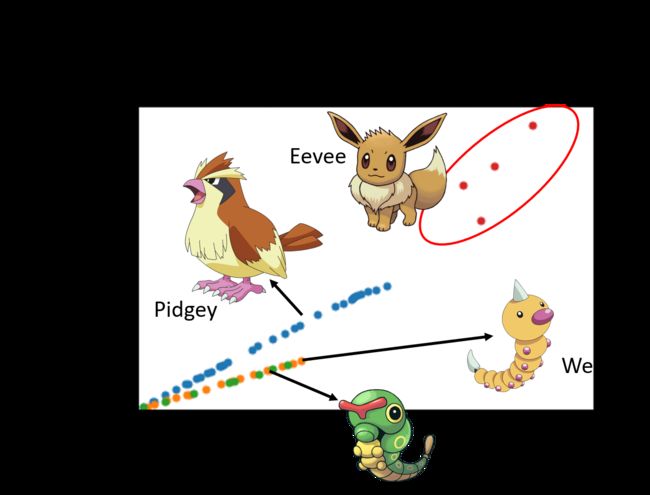
我们期望根据已有的宝可梦进化前后的信息,来预测某只宝可梦进化后的cp值的大小
确定Senario、Task和Model
Senario
首先根据已有的data来确定Senario,我们拥有宝可梦进化前后cp值的这样一笔数据,input是进化前的宝可梦(包括它的各种属性),output是进化后的宝可梦的cp值;因此我们的data是labeled,使用的Senario是Supervised Learning
Task
然后根据我们想要function的输出类型来确定Task,我们预期得到的是宝可梦进化后的cp值,是一个scalar,因此使用的Task是Regression
Model
关于Model,选择很多,这里采用的是Non-linear Model
设定具体参数
X X X: 表示一只宝可梦,用下标表示该宝可梦的某种属性
X c p X_{cp} Xcp:表示该宝可梦进化前的cp值
X s X_s Xs: 表示该宝可梦是属于哪一种物种,比如妙瓜种子、皮卡丘…
X h p X_{hp} Xhp:表示该宝可梦的hp值即生命值是多少
X w X_w Xw: 代表该宝可梦的重重量
X h X_h Xh: 代表该宝可梦的高度
f ( ) f() f(): 表示我们要找的function
y y y: 表示function的output,即宝可梦进化后的cp值,是一个scalar
Regression的具体过程
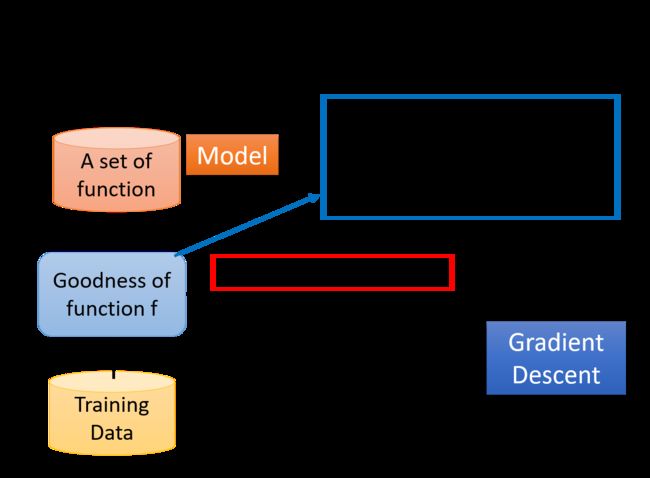
回顾一下machine Learning的三个步骤:
- 定义一个model即function set
- 定义一个goodness of function损失函数去评估该function的好坏
- 找一个最好的function
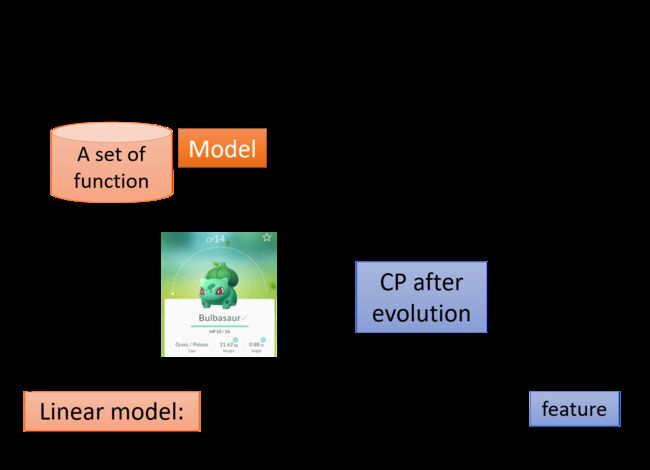
Step1:Model (function set)
如何选择一个function的模型呢?毕竟只有确定了模型才能调参。这里没有明确的思路,只能凭经验去一种种地试
Linear Model 线性模型
y = b + w ⋅ X c p y=b+w \cdot X_{cp} y=b+w⋅Xcp
y代表进化后的cp值, X c p X_{cp} Xcp代表进化前的cp值,w和b代表未知参数,可以是任何数值
根据不同的w和b,可以确定不同的无穷无尽的function,而 y = b + w ⋅ X c p y=b+w \cdot X_{cp} y=b+w⋅Xcp这个抽象出来的式子就叫做model,是以上这些具体化的function的集合,即function set
实际上这是一种Linear Model,但只考虑了宝可梦进化前的cp值,因而我们可以将其扩展为:
y = b + ∑ w i x i y=b+ \sum w_ix_i y=b+∑wixi
xi: an attribute of input X ( xi is also called feature,即特征值)
wi:weight of xi
b: bias
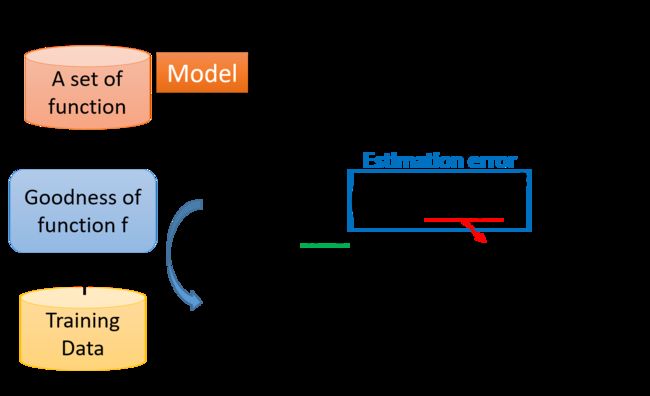
Step2:Goodness of Function
参数说明
x i x^i xi:用上标来表示一个完整的object的编号, x i x^{i} xi表示第i只宝可梦(下标表示该object中的component)
y ^ i \widehat{y}^i y i:用 y ^ \widehat{y} y 表示一个实际观察到的object输出,上标为i表示是第i个object
注:由于regression的输出值是scalar,因此 y ^ \widehat{y} y 里面并没有component,只是一个简单的数值;但是未来如果考虑structured Learning的时候,我们output的object可能是有structured的,所以我们还是会需要用上标下标来表示一个完整的output的object和它包含的component

Loss function 损失函数
为了衡量function set中的某个function的好坏,我们需要一个评估函数,即Loss function,损失函数,简称L;loss function是一个function的function
L ( f ) = L ( w , b ) L(f)=L(w,b) L(f)=L(w,b)
input:a function;
output:how bad/good it is
由于 f : y = b + w ⋅ x c p f:y=b+w \cdot x_{cp} f:y=b+w⋅xcp,即f是由b和w决定的,因此input f就等价于input这个f里的b和w,因此Loss function实际上是在衡量一组参数的好坏
之前提到的model是由我们自主选择的,这里的loss function也是,最常用的方法就是采用类似于方差和的形式来衡量参数的好坏,即预测值与真值差的平方和;这里真正的数值减估测数值的平方,叫做估测误差,Estimation error,将10个估测误差合起来就是loss function
L ( f ) = L ( w , b ) = ∑ n = 1 10 ( y ^ n − ( b + w ⋅ x c p n ) ) 2 L(f)=L(w,b)=\sum_{n=1}^{10}(\widehat{y}^n-(b+w \cdot {x}^n_{cp}))^2 L(f)=L(w,b)=n=1∑10(y n−(b+w⋅xcpn))2
如果 L ( f ) L(f) L(f)越大,说明该function表现得越不好; L ( f ) L(f) L(f)越小,说明该function表现得越好
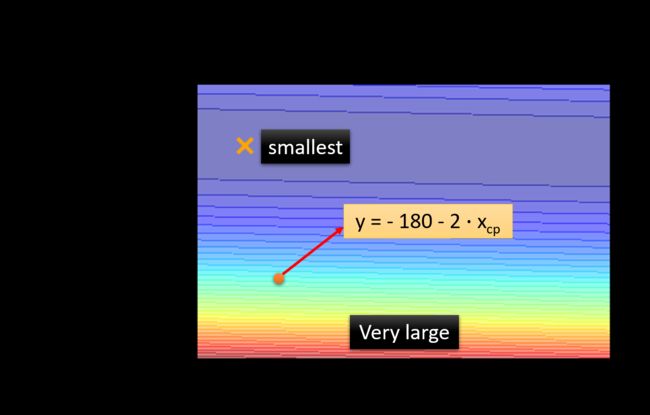
Loss function可视化
下图中是loss function的可视化,该图中的每一个点都代表一组(w,b),也就是对应着一个function;而该点的颜色对应着的loss function的结果L(w,b),它表示该点对应function的表现有多糟糕,颜色越偏红色代表Loss的数值越大,这个function的表现越不好,越偏蓝色代表Loss的数值越小,这个function的表现越好
比如图中用红色箭头标注的点就代表了b=-180 , w=-2对应的function,即 y = − 180 − 2 ⋅ x c p y=-180-2 \cdot x_{cp} y=−180−2⋅xcp,该点所在的颜色偏向于红色区域,因此这个function的loss比较大,表现并不好
Step3:Pick the Best Function
我们已经确定了loss function,他可以衡量我们的model里面每一个function的好坏,接下来我们要做的事情就是,从这个function set里面,挑选一个最好的function
挑选最好的function这一件事情,写成formulation/equation的样子如下:
f ∗ = a r g m i n f L ( f ) f^*={arg} \underset{f}{min} L(f) f∗=argfminL(f),或者是
w ∗ , b ∗ = a r g m i n w , b L ( w , b ) = a r g m i n w , b ∑ n = 1 10 ( y ^ n − ( b + w ⋅ x c p n ) ) 2 w^*,b^*={arg}\ \underset{w,b}{min} L(w,b)={arg}\ \underset{w,b}{min} \sum\limits^{10}_{n=1}(\widehat{y}^n-(b+w \cdot x^n_{cp}))^2 w∗,b∗=arg w,bminL(w,b)=arg w,bminn=1∑10(y n−(b+w⋅xcpn))2
也就是那个使 L ( f ) = L ( w , b ) = L o s s L(f)=L(w,b)=Loss L(f)=L(w,b)=Loss最小的 f f f或 ( w , b ) (w,b) (w,b),就是我们要找的 f ∗ f^* f∗或 ( w ∗ , b ∗ ) (w^*,b^*) (w∗,b∗)(有点像极大似然估计的思想)
利用线性代数的知识,可以解得这个closed-form solution,但这里采用的是一种更为普遍的方法——gradient descent(梯度下降法)
Gradient Descent 梯度下降
上面的例子比较简单,用线性代数的知识就可以解;但是对于更普遍的问题来说,gradient descent的厉害之处在于,只要 L ( f ) L(f) L(f)是可微分的,gradient descent都可以拿来处理这个 f f f,找到表现比较好的parameters
单个参数的问题
以只带单个参数w的Loss Function L(w)为例,首先保证 L ( w ) L(w) L(w)是可微的
w ∗ = a r g m i n w L ( w ) w^*={arg}\ \underset{w}{min} L(w) w∗=arg wminL(w) 我们的目标就是找到这个使Loss最小的 w ∗ w^* w∗,实际上就是寻找切线L斜率为0的global minima最小值点(注意,存在一些local minima极小值点,其斜率也是0)
有一个暴力的方法是,穷举所有的w值,去找到使loss最小的 w ∗ w^* w∗,但是这样做是没有效率的;而gradient descent就是用来解决这个效率问题的
-
首先随机选取一个初始的点 w 0 w^0 w0 (当然也不一定要随机选取,如果有办法可以得到比较接近 w ∗ w^* w∗的表现得比较好的 w 0 w^0 w0当初始点,可以有效地提高查找 w ∗ w^* w∗的效率)
-
计算 L L L在 w = w 0 w=w^0 w=w0的位置的微分,即 d L d w ∣ w = w 0 \frac{dL}{dw}|_{w=w^0} dwdL∣w=w0,几何意义就是切线的斜率
-
如果切线斜率是negative负的,那么就应该使w变大,即往右踏一步;如果切线斜率是positive正的,那么就应该使w变小,即往左踏一步,每一步的步长step size就是w的改变量
w的改变量step size的大小取决于两件事
-
一是现在的微分值 d L d w \frac{dL}{dw} dwdL有多大,微分值越大代表现在在一个越陡峭的地方,那它要移动的距离就越大,反之就越小;
-
二是一个常数项 η η η,被称为learning rate,即学习率,它决定了每次踏出的step size不只取决于现在的斜率,还取决于一个事先就定好的数值,如果learning rate比较大,那每踏出一步的时候,参数w更新的幅度就比较大,反之参数更新的幅度就比较小
如果learning rate设置的大一些,那机器学习的速度就会比较快;但是learning rate如果太大,可能就会跳过最合适的global minima的点
-
-
因此每次参数更新的大小是 η d L d w η \frac{dL}{dw} ηdwdL,为了满足斜率为负时w变大,斜率为正时w变小,应当使原来的w减去更新的数值,即
w 1 = w 0 − η d L d w ∣ w = w 0 w 2 = w 1 − η d L d w ∣ w = w 1 w 3 = w 2 − η d L d w ∣ w = w 2 . . . w i + 1 = w i − η d L d w ∣ w = w i i f ( d L d w ∣ w = w i = = 0 ) t h e n s t o p ; w^1=w^0-η \frac{dL}{dw}|_{w=w^0} \\ w^2=w^1-η \frac{dL}{dw}|_{w=w^1} \\ w^3=w^2-η \frac{dL}{dw}|_{w=w^2} \\ ... \\ w^{i+1}=w^i-η \frac{dL}{dw}|_{w=w^i} \\ if\ \ (\frac{dL}{dw}|_{w=w^i}==0) \ \ then \ \ stop; w1=w0−ηdwdL∣w=w0w2=w1−ηdwdL∣w=w1w3=w2−ηdwdL∣w=w2...wi+1=wi−ηdwdL∣w=wiif (dwdL∣w=wi==0) then stop;
此时 w i w^i wi对应的斜率为0,我们找到了一个极小值local minima,这就出现了一个问题,当微分为0的时候,参数就会一直卡在这个点上没有办法再更新了,因此通过gradient descent找出来的solution其实并不是最佳解global minima但幸运的是,在linear regression上,是没有local minima的,因此可以使用这个方法

两个参数的问题
今天要解决的关于宝可梦的问题,是含有two parameters的问题,即 ( w ∗ , b ∗ ) = a r g m i n w , b L ( w , b ) (w^*,b^*)=arg \ \underset{w,b} {min} L(w,b) (w∗,b∗)=arg w,bminL(w,b)
当然,它本质上处理单个参数的问题是一样的
-
首先,也是随机选取两个初始值, w 0 w^0 w0和 b 0 b^0 b0
-
然后分别计算 ( w 0 , b 0 ) (w^0,b^0) (w0,b0)这个点上,L对w和b的偏微分,即 ∂ L ∂ w ∣ w = w 0 , b = b 0 \frac{\partial L}{\partial w}|_{w=w^0,b=b^0} ∂w∂L∣w=w0,b=b0 和 ∂ L ∂ b ∣ w = w 0 , b = b 0 \frac{\partial L}{\partial b}|_{w=w^0,b=b^0} ∂b∂L∣w=w0,b=b0
-
更新参数,当迭代跳出时, ( w i , b i ) (w^i,b^i) (wi,bi)对应着极小值点
w 1 = w 0 − η ∂ L ∂ w ∣ w = w 0 , b = b 0 b 1 = b 0 − η ∂ L ∂ b ∣ w = w 0 , b = b 0 w 2 = w 1 − η ∂ L ∂ w ∣ w = w 1 , b = b 1 b 2 = b 1 − η ∂ L ∂ b ∣ w = w 1 , b = b 1 . . . w i + 1 = w i − η ∂ L ∂ w ∣ w = w i , b = b i b i + 1 = b i − η ∂ L ∂ b ∣ w = w i , b = b i i f ( ∂ L ∂ w = = 0 & & ∂ L ∂ b = = 0 ) t h e n s t o p w^1=w^0-η\frac{\partial L}{\partial w}|_{w=w^0,b=b^0} \ \ \ \ \ \ \ \ \ b^1=b^0-η\frac{\partial L}{\partial b}|_{w=w^0,b=b^0} \\ w^2=w^1-η\frac{\partial L}{\partial w}|_{w=w^1,b=b^1} \ \ \ \ \ \ \ \ \ b^2=b^1-η\frac{\partial L}{\partial b}|_{w=w^1,b=b^1} \\ ... \\ w^{i+1}=w^{i}-η\frac{\partial L}{\partial w}|_{w=w^{i},b=b^{i}} \ \ \ \ \ \ \ \ \ b^{i+1}=b^{i}-η\frac{\partial L}{\partial b}|_{w=w^{i},b=b^{i}} \\ if(\frac{\partial L}{\partial w}==0 \&\& \frac{\partial L}{\partial b}==0) \ \ \ then \ \ stop w1=w0−η∂w∂L∣w=w0,b=b0 b1=b0−η∂b∂L∣w=w0,b=b0w2=w1−η∂w∂L∣w=w1,b=b1 b2=b1−η∂b∂L∣w=w1,b=b1...wi+1=wi−η∂w∂L∣w=wi,b=bi bi+1=bi−η∂b∂L∣w=wi,b=biif(∂w∂L==0&&∂b∂L==0) then stop
实际上,L 的gradient就是微积分中的那个梯度的概念,即
∇ L = [ ∂ L ∂ w ∂ L ∂ b ] g r a d i e n t \nabla L= \begin{bmatrix} \frac{\partial L}{\partial w} \\ \frac{\partial L}{\partial b} \end{bmatrix}_{gradient} ∇L=[∂w∂L∂b∂L]gradient
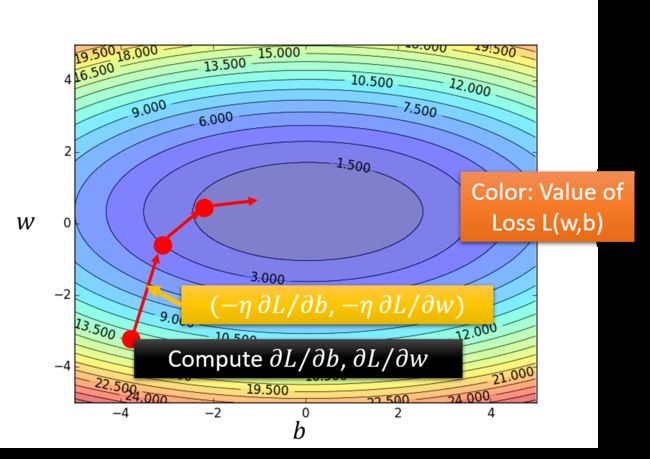
可视化效果如下:(三维坐标显示在二维图像中,loss的值用颜色来表示)
横坐标是b,纵坐标是w,颜色代表loss的值,越偏蓝色表示loss越小,越偏红色表示loss越大
每次计算得到的梯度gradient,即由 ∂ L ∂ b 和 ∂ L ∂ w \frac{\partial L}{\partial b}和\frac{\partial L}{\partial w} ∂b∂L和∂w∂L组成的vector向量,就是该等高线的法线方向(对应图中红色箭头的方向);而 ( − η ∂ L ∂ b , − η ∂ L ∂ w ) (-η\frac{\partial L}{\partial b},-η\frac{\partial L}{\partial w}) (−η∂b∂L,−η∂w∂L)的作用就是让原先的 ( w i , b i ) (w^i,b^i) (wi,bi)朝着gradient的方向即等高线法线方向前进,其中η(learning rate)的作用是每次更新的跨度(对应图中红色箭头的长度);经过多次迭代,最终gradient达到极小值点
注:这里两个方向的η(learning rate)必须保持一致,这样每次更新坐标的step size是等比例缩放的,保证坐标前进的方向始终和梯度下降的方向一致;否则坐标前进的方向将会发生偏移
Gradient Descent的缺点
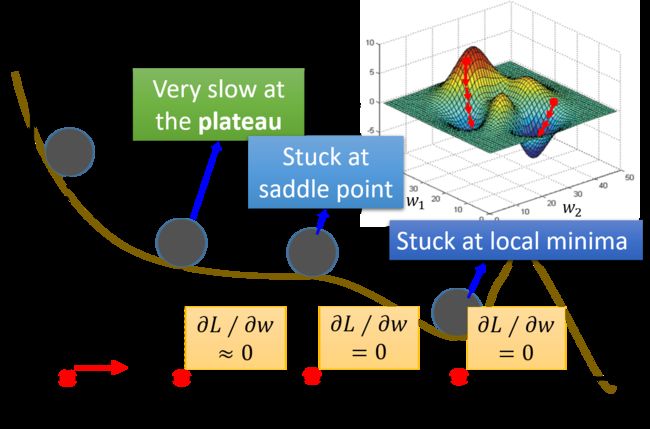
gradient descent有一个令人担心的地方,也就是我之前一直提到的,它每次迭代完毕,寻找到的梯度为0的点必然是极小值点,local minima;却不一定是最小值点,global minima
这会造成一个问题是说,如果loss function长得比较坑坑洼洼(极小值点比较多),而每次初始化 w 0 w^0 w0的取值又是随机的,这会造成每次gradient descent停下来的位置都可能是不同的极小值点;而且当遇到梯度比较平缓(gradient≈0)的时候,gradient descent也可能会效率低下甚至可能会stuck卡住;也就是说通过这个方法得到的结果,是看人品的(滑稽
但是!在linear regression里,loss function实际上是convex的,是一个凸函数,是没有local optimal局部最优解的,他只有一个global minima,visualize出来的图像就是从里到外一圈一圈包围起来的椭圆形的等高线(就像前面的等高线图),因此随便选一个起始点,根据gradient descent最终找出来的,都会是同一组参数
回到pokemon的问题上来
偏微分的计算
现在我们来求具体的L对w和b的偏微分
L ( w , b ) = ∑ n = 1 10 ( y ^ n − ( b + w ⋅ x c p n ) ) 2 ∂ L ∂ w = ∑ n = 1 10 2 ( y ^ n − ( b + w ⋅ x c p n ) ) ( − x c p n ) ∂ L ∂ b = ∑ n = 1 10 2 ( y ^ n − ( b + w ⋅ x c p n ) ) ( − 1 ) L(w,b)=\sum\limits_{n=1}^{10}(\widehat{y}^n-(b+w\cdot x_{cp}^n))^2 \\ \frac{\partial L}{\partial w}=\sum\limits_{n=1}^{10}2(\widehat{y}^n-(b+w\cdot x_{cp}^n))(-x_{cp}^n) \\ \frac{\partial L}{\partial b}=\sum\limits_{n=1}^{10}2(\widehat{y}^n-(b+w\cdot x_{cp}^n))(-1) L(w,b)=n=1∑10(y n−(b+w⋅xcpn))2∂w∂L=n=1∑102(y n−(b+w⋅xcpn))(−xcpn)∂b∂L=n=1∑102(y n−(b+w⋅xcpn))(−1)
How’s the results?
根据gradient descent,我们得到的 y = b + w ⋅ x c p y=b+w\cdot x_{cp} y=b+w⋅xcp中最好的参数是b=-188.4, w=2.7
我们需要有一套评估系统来评价我们得到的最后这个function和实际值的误差error的大小;这里我们将training data里每一只宝可梦 i i i 进化后的实际cp值与预测值之差的绝对值叫做 e i e^i ei,而这些误差之和Average Error on Training Data为 ∑ i = 1 10 e i = 31.9 \sum\limits_{i=1}^{10}e^i=31.9 i=1∑10ei=31.9
What we really care about is the error on new data (testing data)
当然我们真正关心的是generalization的case,也就是用这个model去估测新抓到的pokemon,误差会有多少,这也就是所谓的testing data的误差;于是又抓了10只新的pokemon,算出来的Average Error on Testing Data为 ∑ i = 1 10 e i = 35.0 \sum\limits_{i=1}^{10}e^i=35.0 i=1∑10ei=35.0;可见training data里得到的误差一般是要比testing data要小,这也符合常识
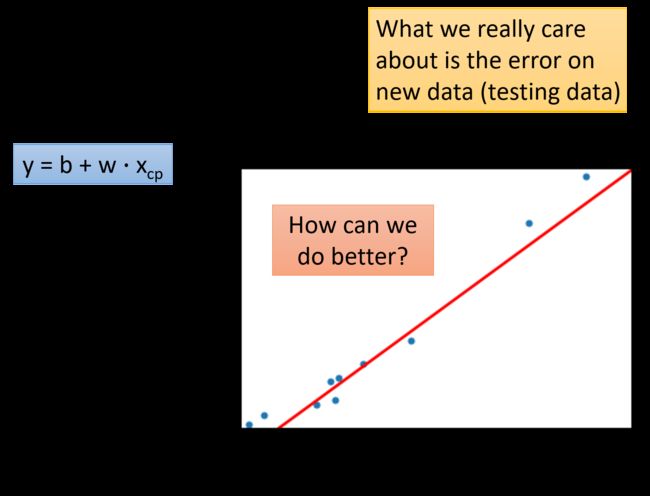
How can we do better?
我们有没有办法做得更好呢?这时就需要我们重新去设计model;如果仔细观察一下上图的data,就会发现在原先的cp值比较大和比较小的地方,预测值是相当不准的
实际上,从结果来看,最终的function可能不是一条直线,可能是稍微更复杂一点的曲线
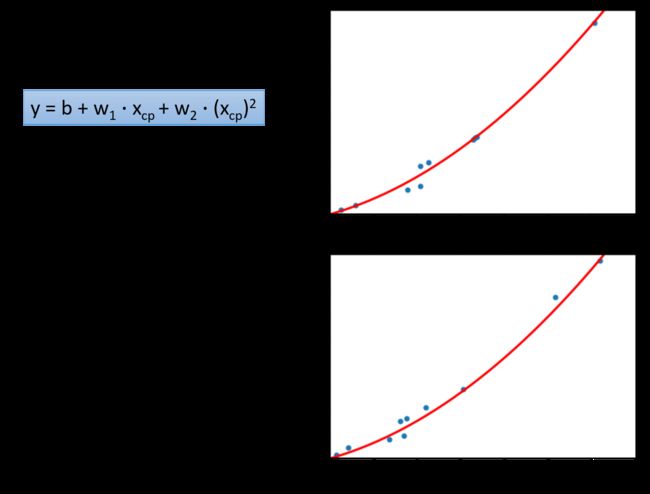
考虑 ( x c p ) 2 (x_{cp})^2 (xcp)2的model
考虑 ( x c p ) 3 (x_{cp})^3 (xcp)3的model

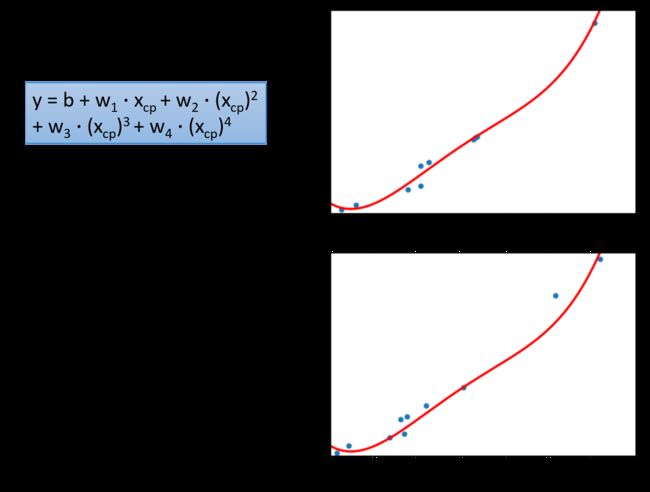
考虑 ( x c p ) 4 (x_{cp})^4 (xcp)4的model
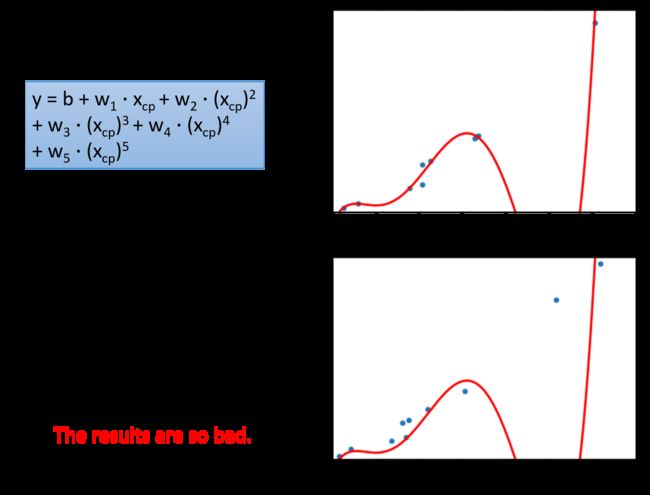
考虑 ( x c p ) 5 (x_{cp})^5 (xcp)5的model
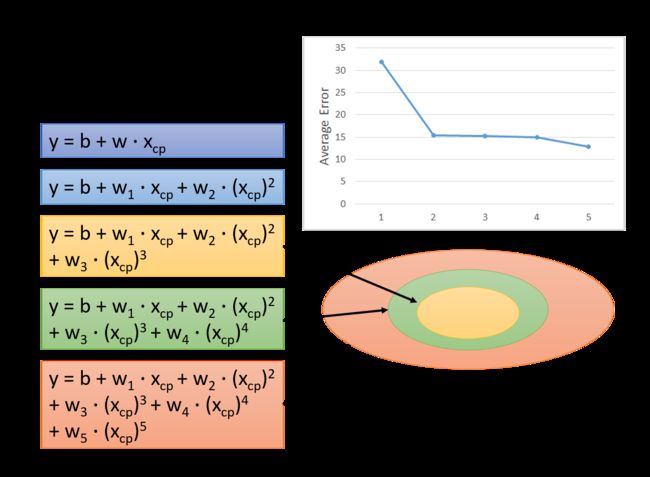
5个model的对比
这5个model的training data的表现:随着 ( x c p ) i (x_{cp})^i (xcp)i的高次项的增加,对应的average error会不断地减小;实际上这件事情非常容易解释,实际上低次的式子是高次的式子的特殊情况(令高次项 ( X c p ) i (X_{cp})^i (Xcp)i对应的 w i w_i wi为0,高次式就转化成低次式)
也就是说,在gradient descent可以找到best function的前提下(多次式为Non-linear model,存在local optimal局部最优解,gradient descent不一定能找到global minima),function所包含的项的次数越高,越复杂,error在training data上的表现就会越来越小;但是,我们关心的不是model在training data上的error表现,而是model在testing data上的error表现
在training data上,model越复杂,error就会越低;但是在testing data上,model复杂到一定程度之后,error非但不会减小,反而会暴增,在该例中,从含有 ( X c p ) 4 (X_{cp})^4 (Xcp)4项的model开始往后的model,testing data上的error出现了大幅增长的现象,通常被称为overfitting过拟合

因此model不是越复杂越好,而是选择一个最适合的model,在本例中,包含 ( X c p ) 3 (X_{cp})^3 (Xcp)3的式子是最适合的model
进一步讨论其他参数
物种 x s x_s xs的影响
之前我们的model只考虑了宝可梦进化前的cp值,这显然是不对的,除了cp值外,还受到物种 x s x_s xs的影响
因此我们重新设计model:
i f x s = P i d g e y : y = b 1 + w 1 ⋅ x c p i f x s = W e e d l e : y = b 2 + w 2 ⋅ x c p i f x s = C a t e r p i e : y = b 3 + w 3 ⋅ x c p i f x s = E e v e e : y = b 4 + w 4 ⋅ x c p if \ \ x_s=Pidgey: \ \ \ \ \ \ \ y=b_1+w_1\cdot x_{cp} \\ if \ \ x_s=Weedle: \ \ \ \ \ \ y=b_2+w_2\cdot x_{cp} \\ if \ \ x_s=Caterpie: \ \ \ \ y=b_3+w_3\cdot x_{cp} \\ if \ \ x_s=Eevee: \ \ \ \ \ \ \ \ \ y=b_4+w_4\cdot x_{cp} if xs=Pidgey: y=b1+w1⋅xcpif xs=Weedle: y=b2+w2⋅xcpif xs=Caterpie: y=b3+w3⋅xcpif xs=Eevee: y=b4+w4⋅xcp
也就是根据不同的物种,设计不同的linear model(这里 x s = s p e c i e s o f x x_s=species \ of \ x xs=species of x),那如何将上面的四个if语句合并成一个linear model呢?
这里引入 δ ( 条 件 表 达 式 ) δ(条件表达式) δ(条件表达式)的概念,当条件表达式为true,则δ为1;当条件表达式为false,则δ为0,因此可以通过下图的方式,将4个if语句转化成同一个linear model
有了上面这个model以后,我们分别得到了在training data和testing data上测试的结果:
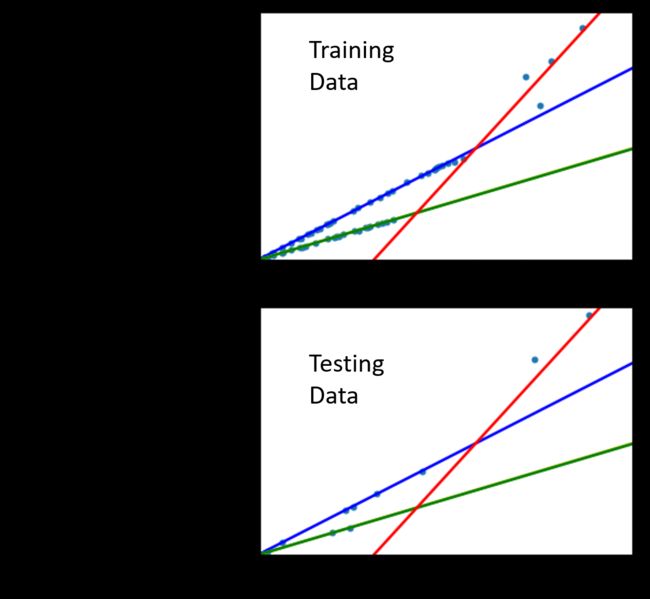
Hp值 x h p x_{hp} xhp、height值 x h x_h xh、weight值 x w x_w xw的影响
考虑所有可能有影响的参数,设计出这个最复杂的model:
i f x s = P i d g e y : y ′ = b 1 + w 1 ⋅ x c p + w 5 ⋅ ( x c p ) 2 i f x s = W e e d l e : y ′ = b 2 + w 2 ⋅ x c p + w 6 ⋅ ( x c p ) 2 i f x s = P i d g e y : y ′ = b 3 + w 3 ⋅ x c p + w 7 ⋅ ( x c p ) 2 i f x s = E e v e e : y ′ = b 4 + w 4 ⋅ x c p + w 8 ⋅ ( x c p ) 2 y = y ′ + w 9 ⋅ x h p + w 10 ⋅ ( x h p ) 2 + w 11 ⋅ x h + w 12 ⋅ ( x h ) 2 + w 13 ⋅ x w + w 14 ⋅ ( x w ) 2 if \ \ x_s=Pidgey: \ \ \ \ y'=b_1+w_1\cdot x_{cp}+w_5\cdot(x_{cp})^2 \\ if \ \ x_s=Weedle: \ \ \ y'=b_2+w_2\cdot x_{cp}+w_6\cdot(x_{cp})^2 \\ if \ \ x_s=Pidgey: \ \ \ y'=b_3+w_3\cdot x_{cp}+w_7\cdot(x_{cp})^2 \\ if \ \ x_s=Eevee: \ \ \ \ y'=b_4+w_4\cdot x_{cp}+w_8\cdot(x_{cp})^2 \\ y=y'+w_9\cdot x_{hp}+w_{10}\cdot(x_{hp})^2+w_{11}\cdot x_h+w_{12}\cdot (x_h)^2+w_{13}\cdot x_w+w_{14}\cdot (x_w)^2 if xs=Pidgey: y′=b1+w1⋅xcp+w5⋅(xcp)2if xs=Weedle: y′=b2+w2⋅xcp+w6⋅(xcp)2if xs=Pidgey: y′=b3+w3⋅xcp+w7⋅(xcp)2if xs=Eevee: y′=b4+w4⋅xcp+w8⋅(xcp)2y=y′+w9⋅xhp+w10⋅(xhp)2+w11⋅xh+w12⋅(xh)2+w13⋅xw+w14⋅(xw)2
算出的training error=1.9,但是,testing error=102.3!这么复杂的model很大概率会发生overfitting(按照我的理解,overfitting实际上是我们多使用了一些input的变量或是变量的高次项使曲线跟training data拟合的更好,但不幸的是这些项并不是实际情况下被使用的,于是这个model在testing data上会表现得很糟糕),overfitting就相当于是那个范围更大的韦恩图,它包含了更多的函数更大的范围,代价就是在准确度上表现得更糟糕
regularization解决overfitting(L2正则化解决过拟合问题)
regularization可以使曲线变得更加smooth,training data上的error变大,但是 testing data上的error变小。有关regularization的具体原理说明详见下一部分
原来的loss function只考虑了prediction的error,即 ∑ i n ( y ^ i − ( b + ∑ j w j x j ) ) 2 \sum\limits_i^n(\widehat{y}^i-(b+\sum\limits_{j}w_jx_j))^2 i∑n(y i−(b+j∑wjxj))2;而regularization则是在原来的loss function的基础上加上了一项 λ ∑ ( w i ) 2 \lambda\sum(w_i)^2 λ∑(wi)2,就是把这个model里面所有的 w i w_i wi的平方和用λ加权(其中i代表遍历n个training data,j代表遍历model的每一项)
也就是说,我们期待参数 w i w_i wi越小甚至接近于0的function,为什么呢?
因为参数值接近0的function,是比较平滑的;所谓的平滑的意思是,当今天的输入有变化的时候,output对输入的变化是比较不敏感的
举例来说,对 y = b + ∑ w i x i y=b+\sum w_ix_i y=b+∑wixi这个model,当input变化 Δ x i \Delta x_i Δxi,output的变化就是 w i Δ x i w_i\Delta x_i wiΔxi,也就是说,如果 w i w_i wi越小越接近0的话,输出对输入就越不sensitive敏感,我们的function就是一个越平滑的function;说到这里你会发现,我们之前没有把bias——b这个参数考虑进去的原因是bias的大小跟function的平滑程度是没有关系的,bias值的大小只是把function上下移动而已
那为什么我们喜欢比较平滑的function呢?
如果我们有一个比较平滑的function,由于输出对输入是不敏感的,测试的时候,一些noises噪声对这个平滑的function的影响就会比较小,而给我们一个比较好的结果

注:这里的λ需要我们手动去调整以取得最好的值
λ值越大代表考虑smooth的那个regularization那一项的影响力越大,我们找到的function就越平滑
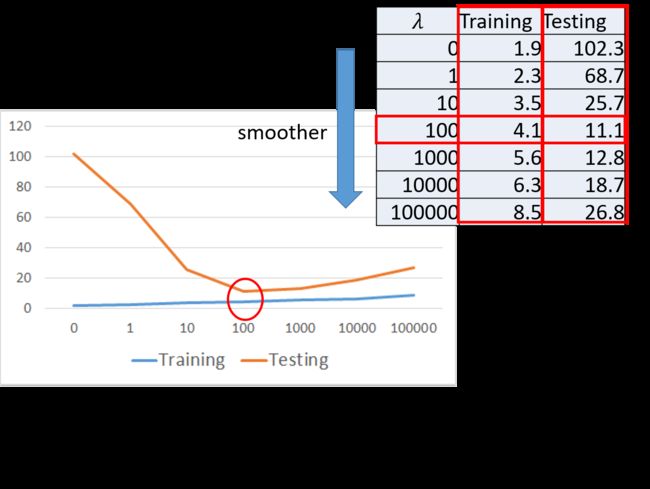
观察下图可知,当我们的λ越大的时候,在training data上得到的error其实是越大的,但是这件事情是非常合理的,因为当λ越大的时候,我们就越倾向于考虑w的值而越少考虑error的大小;但是有趣的是,虽然在training data上得到的error越大,但是在testing data上得到的error可能会是比较小的
下图中,当λ从0到100变大的时候,training error不断变大,testing error反而不断变小;但是当λ太大的时候(>100),在testing data上的error就会越来越大
我们喜欢比较平滑的function,因为它对noise不那么sensitive;但是我们又不喜欢太平滑的function,因为它就失去了对data拟合的能力;而function的平滑程度,就需要通过调整λ来决定,就像下图中,当λ=100时,在testing data上的error最小,因此我们选择λ=100
注:这里的error指的是 1 n ∑ i = 1 n ∣ y ^ i − y i ∣ \frac{1}{n}\sum\limits_{i=1}^n|\widehat{y}^i-y^i| n1i=1∑n∣y i−yi∣
conclusion总结
关于pokemon的cp值预测的流程总结:
-
根据已有的data特点(labeled data,包含宝可梦及进化后的cp值),确定使用supervised learning监督学习
-
根据output的特点(输出的是scalar数值),确定使用regression回归(linear or non-linear)
-
考虑包括进化前cp值、species、hp等各方面变量属性以及高次项的影响,我们的model可以采用这些input的一次项和二次型之和的形式,如:
i f x s = P i d g e y : y ′ = b 1 + w 1 ⋅ x c p + w 5 ⋅ ( x c p ) 2 i f x s = W e e d l e : y ′ = b 2 + w 2 ⋅ x c p + w 6 ⋅ ( x c p ) 2 i f x s = P i d g e y : y ′ = b 3 + w 3 ⋅ x c p + w 7 ⋅ ( x c p ) 2 i f x s = E e v e e : y ′ = b 4 + w 4 ⋅ x c p + w 8 ⋅ ( x c p ) 2 y = y ′ + w 9 ⋅ x h p + w 10 ⋅ ( x h p ) 2 + w 11 ⋅ x h + w 12 ⋅ ( x h ) 2 + w 13 ⋅ x w + w 14 ⋅ ( x w ) 2 if \ \ x_s=Pidgey: \ \ \ \ y'=b_1+w_1\cdot x_{cp}+w_5\cdot(x_{cp})^2 \\ if \ \ x_s=Weedle: \ \ \ y'=b_2+w_2\cdot x_{cp}+w_6\cdot(x_{cp})^2 \\ if \ \ x_s=Pidgey: \ \ \ y'=b_3+w_3\cdot x_{cp}+w_7\cdot(x_{cp})^2 \\ if \ \ x_s=Eevee: \ \ \ \ y'=b_4+w_4\cdot x_{cp}+w_8\cdot(x_{cp})^2 \\ y=y'+w_9\cdot x_{hp}+w_{10}\cdot(x_{hp})^2+w_{11}\cdot x_h+w_{12}\cdot (x_h)^2+w_{13}\cdot x_w+w_{14}\cdot (x_w)^2 if xs=Pidgey: y′=b1+w1⋅xcp+w5⋅(xcp)2if xs=Weedle: y′=b2+w2⋅xcp+w6⋅(xcp)2if xs=Pidgey: y′=b3+w3⋅xcp+w7⋅(xcp)2if xs=Eevee: y′=b4+w4⋅xcp+w8⋅(xcp)2y=y′+w9⋅xhp+w10⋅(xhp)2+w11⋅xh+w12⋅(xh)2+w13⋅xw+w14⋅(xw)2
而为了保证function的平滑性,loss function应使用regularization,即 L = ∑ i = 1 n ( y ^ i − y i ) 2 + λ ∑ j ( w j ) 2 L=\sum\limits_{i=1}^n(\widehat{y}^i-y^i)^2+\lambda\sum\limits_{j}(w_j)^2 L=i=1∑n(y i−yi)2+λj∑(wj)2,注意bias——参数b对function平滑性无影响,因此不额外再次计入loss function(y的表达式里已包含w、b) -
利用gradient descent对regularization版本的loss function进行梯度下降迭代处理,每次迭代都减去L对该参数的微分与learning rate之积,假设所有参数合成一个vector: [ w 0 , w 1 , w 2 , . . . , w j , . . . , b ] T [w_0,w_1,w_2,...,w_j,...,b]^T [w0,w1,w2,...,wj,...,b]T,那么每次梯度下降的表达式如下:
梯 度 : ∇ L = [ ∂ L ∂ w 0 ∂ L ∂ w 1 ∂ L ∂ w 2 . . . ∂ L ∂ w j . . . ∂ L ∂ b ] g r a d i e n t g r a d i e n t d e s c e n t : [ w 0 ′ w 1 ′ w 2 ′ . . . w j ′ . . . b ′ ] L = L ′ = [ w 0 w 1 w 2 . . . w j . . . b ] L = L 0 − η [ ∂ L ∂ w 0 ∂ L ∂ w 1 ∂ L ∂ w 2 . . . ∂ L ∂ w j . . . ∂ L ∂ b ] L = L 0 梯度: \nabla L= \begin{bmatrix} \frac{\partial L}{\partial w_0} \\ \frac{\partial L}{\partial w_1} \\ \frac{\partial L}{\partial w_2} \\ ... \\ \frac{\partial L}{\partial w_j} \\ ... \\ \frac{\partial L}{\partial b} \end{bmatrix}_{gradient} \ \ \ gradient \ descent: \begin{bmatrix} w'_0\\ w'_1\\ w'_2\\ ...\\ w'_j\\ ...\\ b' \end{bmatrix}_{L=L'} = \ \ \ \ \ \ \begin{bmatrix} w_0\\ w_1\\ w_2\\ ...\\ w_j\\ ...\\ b \end{bmatrix}_{L=L_0} -\ \ \ \ \eta \begin{bmatrix} \frac{\partial L}{\partial w_0} \\ \frac{\partial L}{\partial w_1} \\ \frac{\partial L}{\partial w_2} \\ ... \\ \frac{\partial L}{\partial w_j} \\ ... \\ \frac{\partial L}{\partial b} \end{bmatrix}_{L=L_0} 梯度:∇L=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡∂w0∂L∂w1∂L∂w2∂L...∂wj∂L...∂b∂L⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤gradient gradient descent:⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡w0′w1′w2′...wj′...b′⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤L=L′= ⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡w0w1w2...wj...b⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤L=L0− η⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡∂w0∂L∂w1∂L∂w2∂L...∂wj∂L...∂b∂L⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤L=L0
当梯度稳定不变时,即 ∇ L \nabla L ∇L为0时,gradient descent便停止,此时如果采用的model是linear的,那么vector必然落于global minima处(凸函数);如果采用的model是Non-linear的,vector可能会落于local minima处(此时需要采取其他办法获取最佳的function)假定我们已经通过各种方法到达了global minima的地方,此时的vector: [ w 0 , w 1 , w 2 , . . . , w j , . . . , b ] T [w_0,w_1,w_2,...,w_j,...,b]^T [w0,w1,w2,...,wj,...,b]T所确定的那个唯一的function就是在该λ下的最佳 f ∗ f^* f∗,即loss最小
-
这里λ的最佳数值是需要通过我们不断调整来获取的,因此令λ等于0,10,100,1000,…不断使用gradient descent或其他算法得到最佳的parameters: [ w 0 , w 1 , w 2 , . . . , w j , . . . , b ] T [w_0,w_1,w_2,...,w_j,...,b]^T [w0,w1,w2,...,wj,...,b]T,并计算出这组参数确定的function—— f ∗ f^* f∗对training data和testing data上的error值,直到找到那个使testing data的error最小的λ,(这里一开始λ=0,就是没有使用regularization时的loss function)
注:引入评价 f ∗ f^* f∗的error机制,令error= 1 n ∑ i = 1 n ∣ y ^ i − y i ∣ \frac{1}{n}\sum\limits_{i=1}^n|\widehat{y}^i-y^i| n1i=1∑n∣y i−yi∣,分别计算该 f ∗ f^* f∗对training data和testing data(more important)的 e r r o r ( f ∗ ) error(f^*) error(f∗)大小
先设定λ->确定loss function->找到使loss最小的 [ w 0 , w 1 , w 2 , . . . , w j , . . . , b ] T [w_0,w_1,w_2,...,w_j,...,b]^T [w0,w1,w2,...,wj,...,b]T->确定function->计算error->重新设定新的λ重复上述步骤->使testing data上的error最小的λ所对应的 [ w 0 , w 1 , w 2 , . . . , w j , . . . , b ] T [w_0,w_1,w_2,...,w_j,...,b]^T [w0,w1,w2,...,wj,...,b]T所对应的function就是我们能够找到的最佳的function
本章节总结:
-
Pokémon: Original CP and species almost decide the CP after evolution
-
There are probably other hidden factors
-
Gradient descent
- More theory and tips in the following lectures
-
Overfitting and Regularization
-
We finally get average error = 11.1 on the testing data
-
How about new data? Larger error? Lower error?(larger->need validation)
-
Next lecture: Where does the error come from?
- More theory about overfitting and regularization
- The concept of validation(用来解决new data的error高于11.1的问题)
附:Regularization(L1 L2 正则化解决overfitting)
Regularization -> redefine the loss function
关于overfitting的问题,很大程度上是由于曲线为了更好地拟合training data的数据,而引入了更多的高次项,使得曲线更加“蜿蜒曲折”,反而导致了对testing data的误差更大
回过头来思考,我们之前衡量model中某个function的好坏所使用的loss function,仅引入了真实值和预测值差值的平方和这一个衡量标准;我们想要避免overfitting过拟合的问题,就要使得高次项对曲线形状的影响尽可能小,因此我们要在loss function里引入高次项(非线性部分)的衡量标准,也就是将高次项的系数也加权放进loss function中,这样可以使得训练出来的model既满足预测值和真实值的误差小,又满足高次项的系数尽可能小而使曲线的形状比较稳定集中
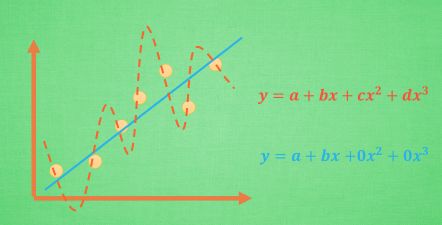
以下图为例,如果loss function仅考虑了 ( y ^ − y ) 2 (\widehat{y}-y)^2 (y −y)2这一误差衡量标准,那么拟合出来的曲线就是红色虚线部分(过拟合),而过拟合就是所谓的model对training data过度自信, 非常完美的拟合上了这些数据, 如果具备过拟合的能力, 那么这个方程就可能是一个比较复杂的非线性方程 , 正是因为这里的 x 3 x^3 x3和 x 2 x^2 x2使得这条虚线能够被弯来弯去, 所以整个模型就会特别努力地去学习作用在 x 3 x^3 x3和 x 2 x^2 x2上的c、d参数. 但是在这个例子里,我们期望模型要学到的却是这条蓝色的曲线. 因为它能更有效地概括数据.而且只需要一个 y = a + b x y=a+bx y=a+bx就能表达出数据的规律.
或者是说, 蓝色的线最开始时, 和红色线同样也有c、d两个参数, 可是最终学出来时, c 和 d 都学成了0, 虽然蓝色方程的误差要比红色大, 但是概括起数据来还是蓝色好
这也是我们通常采用的方法,我们不可能一开始就否定高次项而直接只采用低次线性表达式的model,因为有时候真实数据的确是符合高次项非线性曲线的分布的;而如果一开始直接采用高次非线性表达式的model,就很有可能造成overfitting,在曲线偏折的地方与真实数据的误差非常大。我们的目标应该是这样的:
在无法确定真实数据分布的情况下,我们尽可能去改变loss function的评价标准
- 我们的model的表达式要尽可能的复杂,包含尽可能多的参数和尽可能多的高次非线性项;
- 但是我们的loss function又有能力去控制这条曲线的参数和形状,使之不会出现overfitting过拟合的现象;
- 在真实数据满足高次非线性曲线分布的时候,loss function控制训练出来的高次项的系数比较大,使得到的曲线比较弯折起伏;
- 在真实数据满足低次线性分布的时候,loss function控制训练出来的高次项的系数比较小甚至等于0,使得到的曲线接近linear分布
那我们如何保证能学出来这样的参数呢? 这就是 L1 L2 正规化出现的原因.
之前的loss function仅考虑了 ( y ^ − y ) 2 (\widehat{y}-y)^2 (y −y)2这一误差衡量标准,而L1 L2正规化就是在这个loss function的后面多加了一个东西,即model中跟高次项系数有关的表达式;
-
L1正规化即加上 λ ∑ ∣ w j ∣ λ\sum |w_j| λ∑∣wj∣这一项,loss function变成 L = ∑ i = 1 n ( y ^ i − y i ) 2 + λ ∑ j ∣ w j ∣ L=\sum\limits_{i=1}^n(\widehat{y}^i-y^i)^2+\lambda\sum\limits_{j}|w_j| L=i=1∑n(y i−yi)2+λj∑∣wj∣,即n个training data里的数据的真实值与预测值差值的平方和加上λ权重下的model表达式中所有项系数的绝对值之和
-
L2正规化即加上 λ ∑ ( w j ) 2 \lambda\sum(w_j)^2 λ∑(wj)2这一项,loss function变成 L = ∑ i = 1 n ( y ^ i − y i ) 2 + λ ∑ j ( w j ) 2 L=\sum\limits_{i=1}^n(\widehat{y}^i-y^i)^2+\lambda\sum\limits_{j}(w_j)^2 L=i=1∑n(y i−yi)2+λj∑(wj)2,即n个training data里的数据的真实值与预测值差值的平方和加上λ权重下的model表达式中所有项系数的平方和
相对来说,L2要更稳定一些,L1的结果则不那么稳定,如果用p表示正规化程度,上面两式可总结如下: L = ∑ i = 1 n ( y ^ i − y i ) 2 + λ ∑ j ( w j ) p L=\sum\limits_{i=1}^n(\widehat{y}^i-y^i)^2+\lambda\sum\limits_{j}(w_j)^p L=i=1∑n(y i−yi)2+λj∑(wj)p

