(三)永磁同步电机矢量控制(三电平)——手把手教SVPWM仿真模型制作
0 前言
各位同学们好,上期我们讲了SVPWM算法原理,这期我们详细讲解仿真模型的制作。
本期是有感PMSM矢量控制的最后一期了。往后会做基于此 硬件实验篇,也就是说会讲解硬件电路的设计和DSP编程实现,将实验结果展示给大家,并验证理论和仿真的正确性。这需要一定的时间去准备,所以暂时没这么快能够发布出来。
根据导师的要求,我目前所做的研究领域需要用到FPGA,由于对FPGA不太熟悉,近段时间正在恶补相关知识,所以之后会将FPGA和Verilog HDL硬件语言的学习笔记发布出来,供大家学习参考。
目录
1. 仿真模型整体框图
2. 扇区判断模块
3. 区域判断模块
4. 时间计算模块
5. 时间状态分配模块
6. 仿真结果
7. 总结
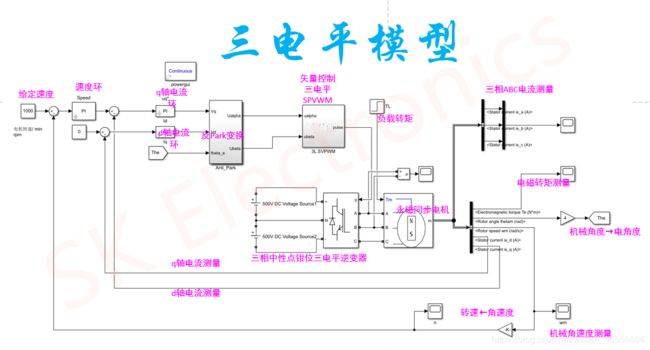
1 仿真模型整体框图
给出仿真模型整体框图,控制部分有:速度环、电流环、反park变换和SVPWM模块;电气部分有:电源、逆变器和永磁同步电机;测量部分有:相电流测量、电磁转矩测量、角速度测量和转速测量,由于测量端可以直接读出id和iq(内部已经经过clark变换和park变换),所以不再自己添加clark和park变换,简化模型。
在这里三电平的模型与两电平不同之处在于SVPWM模块和逆变器类型。
SVPWM模块整体框图
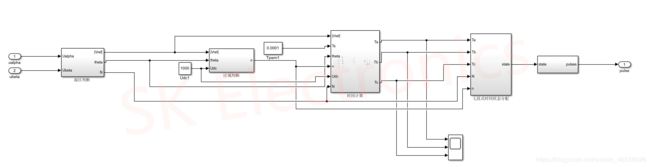
下面详细讲解SVPWM仿真模块。
2 扇区判断模块
上一期讲过SVPWM算法原理——扇区判断。该模块有两输入:Ualpha和Ubeta;三输出:Vref的模、对应扇区内的角度theta和扇区号N。
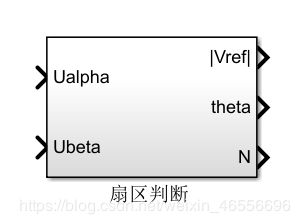
进入模块内部看看。

首先将αβ变成模和辐角,再根据上面图中两个公式即可得到扇区号和扇区内角度。两个判断模块是为了修复bug,否则会出错,大家可以尝试体验下就知道什么原因了。
3 区域判断模块
SVPWM算法原理——区域判断。该模块有三输入:Vref的模、对应扇区内的角度theta和直流电压源数值Vdc;单输出:区域号n。

进入模块内部看看。
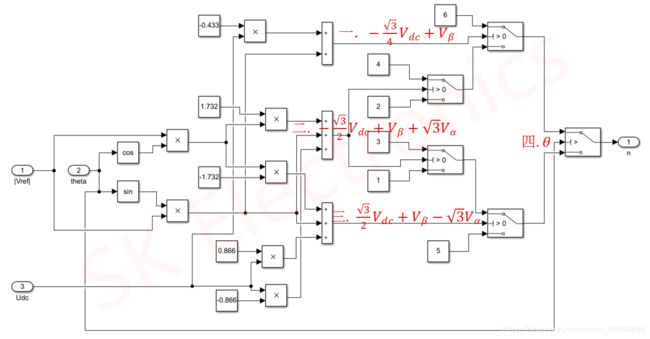
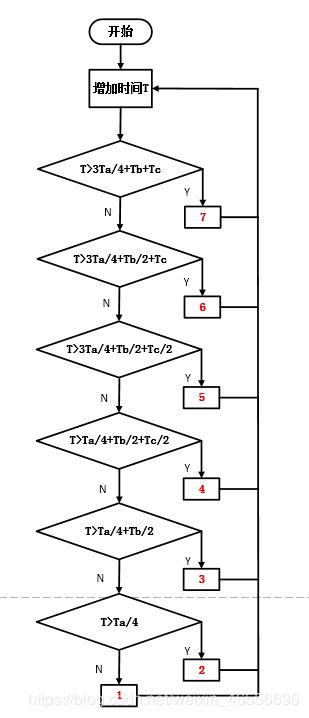
虽然上图看起来很复杂,其实就是根据上期公式的方法来判断。方便分析,已经将四个式子写在上面,根据一定的判断顺序即可输出区域号n。
为了更清楚的表达逻辑判断顺序,结合上图式子画出流程图。

3 时间计算模块
SVPWM算法原理——时间计算。该模块有六输入:Vref的模、对应扇区内的角度theta、直流电压源数值Vdc、采样周期Ts、扇区号N和区域号n;三输出:Ta、Tb和Tc。
该模块原理是采用矩阵知识求解的,我们上期讲过前人采用三角函数和几何知识求解,并已经推导出所有区域的解,但这太麻烦了,如果电平数扩展很多的话,想求解是不现实的。因此我们摒弃前人的方法,用新方法——矩阵求解。

进入模块内部看看。

模块内部看起来很复杂,其实就是利用上期推出的矩阵公式,也就只有几个步骤:计算V1V2V3V4V5V6的α和β部分、区域号对应三个基本矢量排序(根据上期的表格)、扇区号对应三个基本矢量再排序(根据上期的表格得知,扇区号的矢量135顺序相同 246顺序相同,且奇偶数扇区号的后两个矢量位置交换)、求解线性方程组。
注意:这里所用排序模块是“Seletor”;端口选择是“multiport switch”;在求解线性方程组时,系数矩阵是由三个列向量拼接而成,用“Vetor concatenate”。这几个小模块从simulink 库里面直接搜索可得。
4 时间状态分配模块
SVPWM算法原理——时间状态分配。该模块有五输入:Ta、Tb、Tc、扇区号N和区域号n;单输出:当前三相电路状态state。

进入模块内部。

已知在上期算法原理中,知道三个基本矢量是根据Ta、Tb和Tc进行七段式排序。因此在模型搭建可以用三角波作为当前的采样周期的时间,当目前时间经过一小段基本矢量作用时间后,就累加记录当前正在输出第几个基本矢量。最后根据基本矢量即可找到对应电路状态。
为了更清楚的描述,将模块思路画出流程图。
根据时间累加判断,即可知道七段式中当前输出的基本矢量。
在时间状态分配模块中,右边有六个扇区的电路状态模块。以扇区I的为例。

模块内部又包含有6个扇区的电路状态模块,根据当前七段式第M个基本矢量,从而可找到对应电路状态。

以区域1的为例,其中0 1 2分别代表p o n

最终根据电路状态把它转成逆变器对应的开关管状态即可。不懂怎么转的同学看前两期的博文。
(一)永磁同步电机矢量控制(三电平)——浅谈三电平逆变器
(二)永磁同步电机矢量控制(三电平)——三电平传统SVPWM调制算法原理
5 仿真结果
电机参数设置如下:极对数 Pn=4,电枢电感 Ld=5.25mH,Lq=12mH,定子电阻 R=0.958Ω, 磁链ψf=0.1872Wb,转动惯量 J=0.003Kg·m2,阻尼系数 B=0.008N·M·s。
仿真条件:直流侧电压 U=1000V,PWM 开关频率 fPWM=10KHz,仿真时间 0.4s。参考转速 Nref=1000r/min,初始时刻 负载转矩 TL=0N·m,在 t=0.2s 时负载转矩 TL=20N·m。
三电平的与两电平的闭环控制策略是相同的,电流环是采用二阶系统(典型I型系统)设计,转速环是采用三阶系统(典型II型系统)设计的,设计的这样的系统可以做到减少超调量,加快调节时间。。为了突出效果,会做个对比,和传统方法比较,其方法来自《现代永磁同步电机控制》。
本文方法的转速波形:

本文方法的电磁转矩波形:

本文方法的相电流波形:

本文方法的相电压波形:

6 总结
相信各位看了这篇博文,应该都知道三电平的SVPWM模块和矢量控制模型怎么搭建了,大家可以少走弯路啦。三电平的理论分析和仿真到这期就结束了,往后会发布硬件实验篇来验证可行性,给做相关研究和应用的朋友提供指导。具体的会讲到电机驱动电路设计、控制电路设计和算法编程,将会用STM32、DSP和FPGA三个硬件平台来验证。
有不清楚的欢迎评论区回复,需要模型的可联系我!
你的关注,就是我坚持下去的动力!!

更详细的讲解请关注公众号:电力电子学社
之后会陆续开放仿真模型下载喔~敬请关注!