transformer详解:transformer/ universal transformer/ transformer-XL
特别鸣谢刘陆琛@Mayouji在本文写作过程中的帮助
Attention机制在NLP领域的应用最早可以追朔到2014年,Bengio团队将Attention引入NMT(神经机器翻译)任务 [1]。之后更是在深度学习的各个领域得到了广泛应用:如CV中用于捕捉图像上的感受野;NLP中定位关键token/feature.
作为某种程度上可以称为当下NLP领域最强的特征抽取器的transformer [2],同样不是一蹴而就的:
- Transformer
首个完全抛弃RNN的recurrence,CNN的convolution,仅用attention来做特征抽取的模型 - Universal Transformer
重新将recurrence引入transformer,并加入自适应的思想,使得transformer图灵完备,并有着更好的泛化性和计算效率 - Transformer-XL
在transformer的基础上加入Segment-level Recurrence和相对位置编码,从而可以处理超长输入序列,并且更加高效。
在文章开始,首先尝试提出几个问题,来帮助我们理解transformer这一系列模型的思想:
- 为什么要引入attention机制?
Attention机制理论上可以建模任意长度的长距离依赖,并且符合人类直觉- transformer有哪些优点和不足?
完全基于attention,在可以并行的情况下仍然有很强的特征抽取能力,缺点是仍然是自回归的形式、理论上非图灵完备、缺少Recurrent Inductive Bias和条件计算、对超长序列建模能力较差- universal transformer相较于transformer做了哪些改进,有什么不足?
利用Recurrence将transformer的层数由6改为了任意层,并且理论上实现了图灵完备(指的是计算上通用);加入自适应计算的思想,使得模型计算更加高效。- transformer-XL的特点,优势是什么?
引入Segment-level Recurrence,使得transformer可以解决“上下文碎片问题”并捕捉更长距离的依赖,从而可以处理超输入序列
transformer仍然是基于seq2seq,所以介绍attention机制之前,需要先介绍下“前attention”时代,NLP领域中的seq2seq。
seq2seq简介
文中关于seq2seq的介绍均以机器翻译应用为例。
RNN-based seq2seq
seq2seq最早来源于通信,对应过程中的编码和解码。在NLP领域中,seq2seq主要用来解决将一个序列X转化为另一个序列Y这一类问题,通常应用于机器翻译、自动摘要等端到端的生成式应用。seq2seq有一个很重要的特点:输入序列X和输出序列Y可以不等长,不需要一一对应。
传统的seq2seq是条件语言模型,即在已知输入序列X和生成序列Y中已生成词的条件下, 最大化下一目标词的概率,而最终希望得到的是整个输出序列的生成出现的概率最大:
P ( Y ∣ X ) = ∑ t = 1 T log P ( y t ∣ y 1 : t − 1 , X ) P(Y | X)=\sum_{t=1}^{T} \log P\left(y_{t} | y_{1 : t-1}, X\right) P(Y∣X)=t=1∑TlogP(yt∣y1:t−1,X)
其中:
- X为输入序列
- T代表时刻, y 1 : t − 1 y_{1 : t-1} y1:t−1则代表decoder前t-1时间的输出
- 对于seq2seq而言,在训练时 y 1 : t − 1 y_{1 : t-1} y1:t−1是ground truth tokens;而在测试的时候,没有ground truth tokens,此时是采用decoder生成的 y 1 : t − 1 ′ y'_{1 : t-1} y1:t−1′来预测下一个词。训练和预测时这种不一致,也是seq2seq中长期存在的“暴露偏差”的根源,针对这一问题,也有很多的工作,这里就不再展开。
- 上述过程预测输出序列Y的token时,是根据之前时刻的结果 y 1 : t − 1 ′ y'_{1 : t-1} y1:t−1′来预测下一个token,即极大化下一目标token的概率,这是一种典型的贪心策略,得到的是局部最优;而对于一般的端到端生成模型而言,希望得到整个序列的最佳,即最后的生成序列Y的tokens顺序排列的联合概率最大,找到一个全局最优。实际过程中seq2seq在预测时并不使用这种greedy search的策略,而是采用beam search。不过本文主要讲述transformer,seq2seq仅做一个便于问题理解的概述。
下图是一个基本的RNN-based seq2seq(图中的箭头可以描述信息传导过程):

Encoder会将输入序列X编码为一个固定长度的语义向量C:在编码过程中,时刻t的输出仅依赖前一时刻隐层 h t − 1 h_{t-1} ht−1 和当前时刻的输入 x t x_{t} xt
Decoder的输入是encoder得到的语义向量 C C C:解码过程中,时刻t的输出依赖于三个部分,上一个时刻隐层状态 h t − 1 h_{t-1} ht−1和中间语义向量 C C C和上一个时刻的预测输出 y t − 1 y_{t-1} yt−1
Seq2Seq两个部分(Encoder和Decoder)联合训练的目标函数是最大化条件似然函数:
max θ 1 N ∑ n = 1 N log p θ ( y n ∣ x n ) \max _{\boldsymbol{\theta}} \frac{1}{N} \sum_{n=1}^{N} \log p_{\boldsymbol{\theta}}\left(\mathbf{y}_{n} | \mathbf{x}_{n}\right) θmaxN1n=1∑Nlogpθ(yn∣xn)
其中θ为模型的参数,N为训练集的样本个数。
seq2seq中encoder的输入 x i x_i xi和decoder中的输出 y i y_i yi都是词的高维向量表示,向量中蕴涵一定的语义信息,之所以可以用一个高维向量来表示词的语义,其基本假设是上世纪语言学家提出的分布式语义的思想:其认为一个词可以由上下文中的词来表示。
有了分布式语义,我们就可以来理解NLP问题中普遍存在的长距离依赖,考虑语言模型中依据之前的词来预测下一个词:
- 如果我们试图预测“the clouds are in the sky”中的最后一个单词,我们不需要任何更多的上下文信息,从"clonds", “in” 这些近距离的词就可以预测到下一个单词是“sky”
- 而如果尝试预测“I grew up in France… … I speak fluent French.”中的"French",那么需要重点关注远距离的"France"。
上述例子可以表明,当我们做预测时,可能需要重点关注的信息与当前位置的距离非常大,RNN很难保留这种远距离的信息。这就是NLP中普遍存在的长距离依赖。即使有如LSTM,GRU这样加入门控机制和梯度裁剪的RNN变种,其捕捉长距离依赖的能力仍然有所欠缺,Stanford在ACL 2018的一个工作[5]进行了实验,目前可以编码的最长距离在200左右。
RNN-based seq2seq with attention
RNN在将一个不定长输入序列转化为定长的中间语义向量时,会有信息损失,为了避免这样的损失,就引入了Attention机制。Attention机制本身有些类似于人类的直观活动:人在观察一副图画时,直觉会重点关注“更为重要”的信息;人类译者在做翻译时,也会更侧重当前翻译部分所对应的上下文。基于这样的原理,Attention机制在做机器翻译时,会尝试关注源语句中“更为重要”信息,再结合已经翻译的部分,最终得出当前译文。
下面的动图可以很好的描述一个基本的RNN-based seq2seq信息传导过程(图片来源于google seq2seq示例 [4]),在解码得到“Knowledge”时,会将注意力集中在源语句中的“知识”。
结合了attention的seq2seq,不再局限于定长的语义向量,理论上也不会损失远距离的信息,在实际应用过程中也取得了很好的效果。既然如此,一个朴素的想法就是“既然attention机制已经很有效,那么我们去掉RNN,直接用attention的效果会怎么样?” Google在2017年提出的transformer就是一个完全基于self-attention的seq2seq模型。
Transformer
下面的动图(来自于Google AI Blog[6])演示了transformer在机器翻译中的应用:
- Encoder:读取输入语句并生成其representation。
- Decoder:参考Encoder生成的输入语句的representation,逐词生成输出语句。
transformer首先为每个单词生成初始表示或使用预先定义的wordembedding,动图中用空白的圆表示;然后通过self attention,从所有其他单词中收集信息,生成一个新的representation,每个单词由整个上下文(动图中由填满的圆表示)的信息来表示。然后,对所有单词并行重复此步骤多次,依次生成新的representation。
下图(左)是transformer的一个基本架构,左边是编码的部分(transformer的Encoder由6个这样相同的层堆叠而成),右边是解码的部分(transformer的Decoder由6个这样相同的层堆叠而成),下图(右)是展开的示意图
 |
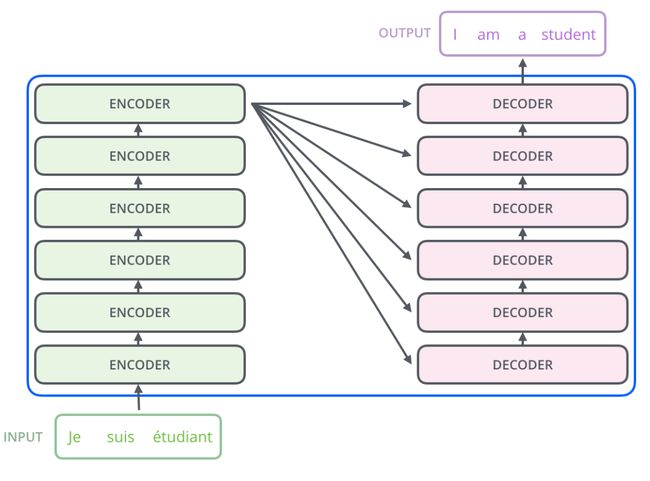 |
Encoder:由6个相同的层堆叠而成,每层有两个sub layer:multi-head self-attention层和一个全连接前馈神经网络;sub layer之间经layer normalization后,再通过residual connection连接。
Decoder:整体类似于Encoder,多了一层multi-head self-attention,用于在encoder stack的输出上加入multi head attention;在multi-head self-attention层中假加入masking,从而确保了位置i的预测只能依赖于位置i之前的已知输出。(因为解码的时候,位置i之后的输入,并不存在,这样可以保持自回归的特性)
以上是对transformer的一个简要概述,以下将对transformer各个部分进行详解。
Attention
Scaled Dot-Product Attention
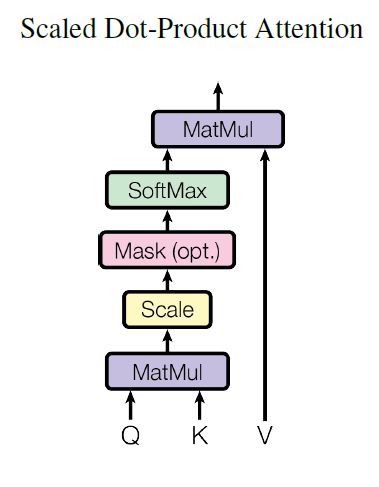
Self Attention本质上是将上下文词的representation加权求和作为当前词的representation。需要关注的部分是我们如何得到加权求和的权值。在Transformer中,这一部分用 A t t e n t i o n ( Q , K , V ) Attention(Q,K,V) Attention(Q,K,V)来体现 ,Q是query,K是Key;通过Q和K的点积的结果来体现上下文词对当前词的影响程度,再通过softmax得到归一化权重:
Attention ( Q , K , V ) = softmax ( Q K T d k ) V \text { Attention }(Q, K, V)=\operatorname{softmax}\left(\frac{Q K^{T}}{\sqrt{d_{k}}}\right) V Attention (Q,K,V)=softmax(dkQKT)V
在transformer中,每个单词会有一个语义向量,乘以权重矩阵 W i Q W^Q_i WiQ, W i K W^K_i WiK, W i V W^V_i WiV,从而得到对应的 Q i Q_i Qi, V i V_i Vi, K i K_i Ki.
d k \sqrt{d_{k}} dk是一个缩放因子, d k d_k dk是向量 Q i Q_i Qi, V i V_i Vi, K i K_i Ki的维度,因为 Q i K i T ∈ ( 0 , d k ) Q_iK_i^T \in (0,d_k) QiKiT∈(0,dk),当 d k d_k dk比较大时, Q i K i T Q_iK_i^T QiKiT值可能会很大,softmax之后可能会出现较多的值接近0。下图是Scaled Dot-Product Attention的示意图:
常用的attention主要有“Add-加”和“Mul-乘”两种(不清楚的可以参考[13]),文章中对于采用mul这种形式的解释是:两种方式的计算复杂度类似,然而mul可以采用矩阵乘法来加速。
除了计算效率之外,在google的另一篇文章中[14]在newstest2013数据集上对两种attention进行了实验,有如下结果:
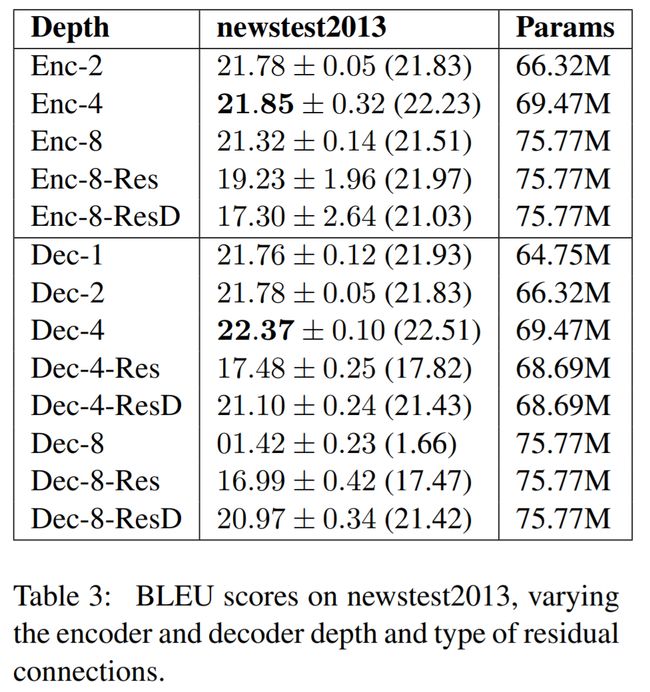
可以看出,当 d k d_k dk增大时,mul attention的结果会更好。
multi-head attention
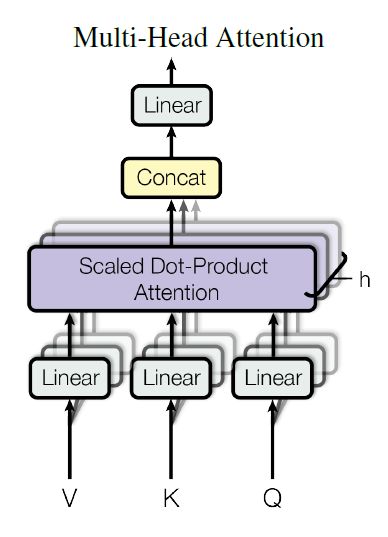
transformer所用的attention并非上述那么简单,其会将原始512维 ( Q , K , V ) (Q,K,V) (Q,K,V)通过8次不同的线性投影,得到8组低维的 ( Q i , K i , V i ) (Q_i,K_i,V_i) (Qi,Ki,Vi)(64维),共投影8次;利用投影后的结果并行地进行8次线性投影,从而得到8个64维的输出,再拼接到一起得到multi-head attention的输出。示意图如下:
计算过程如下:
MultiHead ( Q , K , V ) = Concat ( head 1 , … , head h ) W O where head i = Attention ( Q W i Q , K W i K , V W i V ) \begin{aligned} \text { MultiHead }(Q, K, V) &=\text { Concat }\left(\text { head }_{1}, \ldots, \text { head }_{\mathrm{h}}\right) W^{O} \\ \text { where head }_{\mathrm{i}} &=\text { Attention }\left(Q W_{i}^{Q}, K W_{i}^{K}, V W_{i}^{V}\right) \end{aligned} MultiHead (Q,K,V) where head i= Concat ( head 1,…, head h)WO= Attention (QWiQ,KWiK,VWiV)
其中的投影参数矩阵$
{W_{i}^{Q} \in \mathbb{R}^{512\times 64}, W_{i}^{K} \in \mathbb{R}^{512\times 64}, W_{i}^{V} \in \mathbb{R}^{512\times 64}} $都是由模型学习得到
这样做的好处是:
- 可以综合各个单词,在不同表示子空间的信息
- 因为对单个attention layer而言,维度是变小了的,综合来看,multi-head attention和single-head attention的效率是一样的。
attention in transformer
在transformer中,共有3个部分使用了multi-head attention,下图中红框部分:Attention in Encoder-Decoder,Attention in Encoder和Attention in Decoder。
其中比较特殊的是Attention in Decoder,因为在解码的时候,仅知道当前词左边的部分。由此,利用masking(当前词右侧的内容被设置为−∞,这样softmax的值为0)屏蔽了当前词右边部分的影响,保持了自回归的特性。

Position-wise Feed-Forward Networks
decoder和encoder中都存在一个相同的全连接前馈神经网络,该网络包括两次线性变换,两次变换中间是一个ReLU激活函数
FFN ( x ) = max ( 0 , x W 1 + b 1 ) W 2 + b 2 \operatorname{FFN}(x)=\max \left(0, x W_{1}+b_{1}\right) W_{2}+b_{2} FFN(x)=max(0,xW1+b1)W2+b2
该网络有两个特点:
- 各个层中的网络结构相同,但是参数不同
- 输入和输出的向量维度均为512,中间层的维度是2048
论文在3.3小节对“Position-wise”进行了解释:“…which is applied to each position separately and identically…” 。即输入序列不同位置token在multi-head attention之后的结果,在FNN的过程中是不会相互影响的。
在multi-head attention结束之后,FNN层的输入矩阵 X ∈ R d i n p u t × d m o d e l X\in R^{d_{input}\times d_{model}} X∈Rdinput×dmodel,输入序列中,不同位置token在attention之后的结果在不同行。这些结果会被映射到更高维的特征空间,经过Relu做非线性筛选,然后再恢复到原始维度,过程中 W 1 ∈ R d i n p u t × d f f , W 2 ∈ R d f f × d m o d e l W_1 \in R^{d_{input}\times d_{ff}},W_2 \in R^{d_{ff}\times d_{model}} W1∈Rdinput×dff,W2∈Rdff×dmodel. ( d f f = 2048 , d m o d e l = 512 d_{ff}=2048,\ d_{model}=512 dff=2048, dmodel=512)
Embeddings and Softmax
这一部分和基础的seq2seq model类似,其中input embedding layer、output embedding layer 和pre-softmaxlinear transformation 共享权重。(在embedding layers 的会被乘上 d m o d e l \sqrt{d_{model}} dmodel)
Positional Encoding
在NLP中,token的位置也是很重要的信息,例如“我喜欢林允儿”和“林允儿喜欢我”都由相同的token组成,然而意思则是天差地别。RNN-based的seq2seq由于recurrence的存在,已经编码了位置信息,attention机制则做不到这一点,为此,transformer中加入了位置函数来编码位置信息:
P E ( p o s , 2 i ) = sin ( pos / 1000 0 2 i / d model ) P E ( pos, 2 i + 1 ) = cos ( pos / 1000 0 2 i / d model ) \begin{aligned} P E_{(p o s, 2 i)} &=\sin \left(\operatorname{pos} / 10000^{2 i / d_{\text {model }}}\right) \\ P E_{(\text {pos, } 2 i+1)} &=\cos \left(\text { pos } / 10000^{2 i / d_{\text {model }}}\right) \end{aligned} PE(pos,2i)PE(pos, 2i+1)=sin(pos/100002i/dmodel )=cos( pos /100002i/dmodel )
其中pos是指当前词在句子中的位置,i是指向量中每个值的index:在偶数位置,使用正弦编码,在奇数位置,使用余弦编码。
之所以选用上述公式,是因为其能很好的编码相对位置,位置为pos+k的词可以由位置为pos和k的词来表示:
P E ( p o s + k , 2 i ) = P E ( p o s , 2 i ) P E ( k , 2 i + 1 ) + P E ( p o s , 2 i + 1 ) P E ( k , 2 i ) P E ( p o s + k , 2 i + 1 ) = P E ( p o s , 2 i + 1 ) P E ( k , 2 i + 1 ) − P E ( p o s , 2 i ) P E ( k , 2 i ) \begin{array}{c}{P E(p o s+k, 2 i)=P E(p o s, 2 i) P E(k, 2 i+1)+P E(p o s, 2 i+1) P E(k, 2 i)} \\ {P E(p o s+k, 2 i+1)=P E(p o s, 2 i+1) P E(k, 2 i+1)-P E(p o s, 2 i) P E(k, 2 i)}\end{array} PE(pos+k,2i)=PE(pos,2i)PE(k,2i+1)+PE(pos,2i+1)PE(k,2i)PE(pos+k,2i+1)=PE(pos,2i+1)PE(k,2i+1)−PE(pos,2i)PE(k,2i)
同时可以证明:间隔为k的任意两个位置编码的欧式空间距离是恒等的,只与k有关。
另一种编码位置的方式是学习position embedding (参考文献);不过两种方法的效果类似,利用公式计算则更为简单,并且可以处理比训练时更长的序列。
Add & Norm
Add是残差连接,可以有效的改善深层模型中梯度消失的问题,且能打破网络对称性,从而减轻网络退化问题[17]
bag of tricks
transformer中还有一些细节,碎碎念:Transformer的细枝末节这篇文章已经写得很棒,就不再赘述。
- Weight Tying
- Learning rate warm-up
- Regularization
- Masking
缺陷
transformer一经提出,在NLP领域也引起了广泛关注,在当下(2019年)仍有很多任务的STOA方法是基于transformer的。当然transformer也存在着不足:
- 缺少Recurrent Inductive Bias:
学习算法中Inductive Bias可以用来预测从未遇到的输入的输出(参考[10])。对于很多序列建模任务(如需要对输入的层次结构进行建模时,或者在训练和推理期间输入长度的分布不同时),Recurrent Inductive Bias至关重要。EMNLP 2018 上的一个工作[9]对这一点进行了实证。 - Transformer是非图灵完备的:
非图灵完备通俗的理解,就是无法解决所有的问题(可以参考[12])
在Transformer中,单层中sequential operation (context two symbols需要的操作数)是 O ( 1 ) O(1) O(1) time,独立于输入序列的长度。那么总的sequenctial operation仅由层数 T T T决定。这意味着transformer不能在计算上通用,即无法处理某些输入。如:输入是一个需要对每个输入元素进行顺序处理的函数,在这种情况下,对于任意给定的深度 T T T的transformer,都可以构造一个长度为 N > T N > T N>T的输入序列,该序列不能被transformer正确处理 - transformer缺少conditional computation:
transformer在encoder的过程中,所有输入元素都有相同的计算量,比如对于“I arrived at the bank after crossing the river", 和"river"相比,需要更多的背景知识来推断单词"bank"的含义,然而transformer在编码这个句子的时候,无条件对于每个单词应用相同的计算量,这样的过程显然是低效的。 - 不能很好的处理超长输入:
理论上来说,attention可以关联两个任意远距离的词,但实际中,由于计算资源有限,仍然会限制输入序列的长度,超过这个长度的序列会被截断。
为了解决前三个问题,google在ICLR 2019上提出了transformer的改进版本universal transformer。
Universal Transformer
在transformer中,block的层数是固定的(base是6层),universal transformer则通过递归函数使得层数不再固定,可以是任意,下图是universal transformer encoder的示意图,横坐标position是输入序列token的位置;纵坐标是迭代次数depth。
上述模式综合了transformer的优点,同时又具备RNN的Recurrent Inductive Bias,并且在理论上做到了图灵完备。
universal transformer第二个比较大的改进是加入了dynamic halting: 基于自适应时间算法(Adaptive Computation Time, ACT) [11],该算法由DeepMind在2016年提出。有了dynamic halting,在编码“I arrived at the bank after crossing the river", 对于"river"编码的递归次数会变少;对于“bank”的编码递归次数会相应更多.
下图是Universal Transformer with dynamic halting在encoder的一个示意图[7],可以看到输入序列中,不同token的计算量不再相同,这样就实现了条件计算:
transformer-XL
在理解一篇文章时,为了理解当前一个词或者是句子,经常会出现需要参考上千个单词之后的词的请况,这种长距离距离很难捕获:理论上,基于attention机制可以让transformer捕获任意长度的依赖,然而由于资源有限, Transformer 通常会将语料分割为几百个字符的固定长度的片段,每个片段(segment)之间相互独立,独立处理
这样的方式存在两个问题:
- 能建模的依赖关系不会超过segment的长度
- 会导致context fragmentation(上下文碎片化):因为分片并不是根据语义边界,而是根据长度划分,很有可能会将一个完整的句子分割,那么在预测一个segment的前几个token的时候,很可能缺乏必要的语义信息。
在transformer-XL中,采用Segment-level Recurrence来解决这个问题
Segment-level Recurrence
transformer-XL在文章中所对比的Vanilla Transformer model,也是google在AAAI 2019[18]上的一篇工作,其将transformer用于character-level的语言模型中:添加了多个loss来提高其表现并加快拟合速度;增大transformer层数来提高表现,最多到了64层。
下图是Vanilla transformer在训练时的示意图(segment长度为4)[19]:

在transformer-XL中,上一个时刻的segment的representation会被保存下来,并作为下一个segment的扩展上下文,整个过程类似于RNN。由此,可以捕获的最大依赖项长度增加了N倍(N是网络深度);同时Recurrence使得编码当前segment时,仍然可以利用之前segment的信息,从而解决了context fragmentation问题。下图是transformer-XL在训练时的示意图(segment长度为4):

Relative Positional Encodeing
如果只有Segment-level Recurrence,那么位置编码将会出现问题:因为每个segment中的位置编码是一样的,当重用之前segment的representation时,位置编码没有被区分,显然会出现问题,下述是transformer对于segment的处理, h τ h_{\tau} hτ代表对于第 τ \tau τ个segment,transformer的输出; E s τ + 1 {E}_{\mathbf{s}_{\tau+1}} Esτ+1是第 τ + 1 \tau+1 τ+1个segment的初始embedding; U 1 : L {U}_{1: L} U1:L代表位置编码。
h τ + 1 = f ( h τ , E s τ + 1 + U 1 : L ) h τ = f ( h τ − 1 , E s τ + U 1 : L ) \begin{aligned} \mathbf{h}_{\tau+1} &=f\left(\mathbf{h}_{\tau}, \mathbf{E}_{\mathbf{s}_{\tau+1}}+\mathbf{U}_{1: L}\right) \\ \mathbf{h}_{\tau} &=f\left(\mathbf{h}_{\tau-1}, \mathbf{E}_{\mathbf{s}_{\tau}}+\mathbf{U}_{1: L}\right) \end{aligned} hτ+1hτ=f(hτ,Esτ+1+U1:L)=f(hτ−1,Esτ+U1:L)
从上述式子中可以看出,对于任意一个segment,其位置编码都是相同的。
一个直观的解决方案是:将相对位置信息编码到扩展上下文中,其本质是捕获recurrence过程中的时序信息或者是偏差(temporal clue or “bias” )。transformer-XL并没有采用将bias到扩展上下文的方案,而是使用相对位置编码:因为一个token在整个序列中的绝对位置并不重要,只需要在计算attention sorce时知道两个单词的相对位置即可。
transformer-XL的相对位置编码来源于对[20]和[21]的改进:这两个工作均来源于google,分别发表在了NAACL和ICLR,其将bias整合到了attention中:
A i , j a b s = E x i ⊤ W q ⊤ W k E x j ⏟ ( a ) + E x i ⊤ W q ⊤ W k U j ⏟ ( b ) + U i ⊤ W q ⊤ W k E x j ⏟ ( c ) + U i ⊤ W q ⊤ W k U j ⏟ ( d ) \begin{aligned} \mathbf{A}_{i, j}^{\mathrm{abs}} &=\underbrace{\mathbf{E}_{x_{i}}^{\top} \mathbf{W}_{q}^{\top} \mathbf{W}_{k} \mathbf{E}_{x_{j}}}_{(a)}+\underbrace{\mathbf{E}_{x_{i}}^{\top} \mathbf{W}_{q}^{\top} \mathbf{W}_{k} \mathbf{U}_{j}}_{(b)} \\ &+\underbrace{\mathbf{U}_{i}^{\top} \mathbf{W}_{q}^{\top} \mathbf{W}_{k} \mathbf{E}_{x_{j}}}_{(c)}+\underbrace{\mathbf{U}_{i}^{\top} \mathbf{W}_{q}^{\top} \mathbf{W}_{k} \mathbf{U}_{j}}_{(d)} \end{aligned} Ai,jabs=(a) Exi⊤Wq⊤WkExj+(b) Exi⊤Wq⊤WkUj+(c) Ui⊤Wq⊤WkExj+(d) Ui⊤Wq⊤WkUj
W q E x i W_q{E}_{x_{i}} WqExi得到的是第i个token的Query向量, W k E x j W_k{E}_{x_{j}} WkExj得到的是第j个token的key向量, U i U_i Ui代表第i个token的位置编码,所以:
- a是query向量和key向量的相乘
- b是query向量和key对应的位置编码相乘
- c是query对应位置编码和key向量相乘
- d是query对应位置编码和key对应位置编码相乘
实际上,上式是一个乘法分配律的展开式,而在transformer-XL中,做了三处改变:
A i , j r e l = E x i ⊤ W q ⊤ W k , E E x j ⏟ ( a ) + E x i ⊤ W q ⊤ W k , R R i − j ⏟ ( b ) + u ⊤ W k , E E x j ⏟ ( c ) + v ⊤ W k , R R i − j ⏟ ( d ) \begin{aligned} \mathbf{A}_{i, j}^{\mathrm{rel}} &=\underbrace{\mathbf{E}_{x_{i}}^{\top} \mathbf{W}_{q}^{\top} \mathbf{W}_{k, E} \mathbf{E}_{x_{j}}}_{(a)}+\underbrace{\mathbf{E}_{x_{i}}^{\top} \mathbf{W}_{q}^{\top} \mathbf{W}_{k, R} \mathbf{R}_{i-j}}_{(b)} \\ &+\underbrace{u^{\top} \mathbf{W}_{k, E} \mathbf{E}_{x_{j}}}_{(c)}+\underbrace{v^{\top} \mathbf{W}_{k, R} \mathbf{R}_{i-j}}_{(d)} \end{aligned} Ai,jrel=(a) Exi⊤Wq⊤Wk,EExj+(b) Exi⊤Wq⊤Wk,RRi−j+(c) u⊤Wk,EExj+(d) v⊤Wk,RRi−j
- b和d中将Key的绝对位置编码 U j U_j Uj改为了相对位置编码 R i − j R_{i-j} Ri−j
R i − j R_{i-j} Ri−j是一个无需学习的sinusoidal编码矩阵,计算方式同最初的transformer。该方式可以避免不同segments之间由于tokens在各自segment的index相同而产生的时序冲突的问题。 - c和d中,将query的绝对位置编码进行了替换
因为query相对于自己的位置是一样,a那么ttention bias的计算与query在序列中的绝对位置无关,应当保持不变 - W k W_k Wk-> W k , E , W k , R W_{k,E},W_{k,R} Wk,E,Wk,R
在之前transformer中,token的embedding和position embedding会加起来,再经过 W k W_k Wk矩阵做线性变换,即embedding和position encoing是相同的线性变换,该处改变使得key的embedding和positional encoding 分别采用了不同的线性变换。其中 W k , E W_{k,E} Wk,E对应于key的embedding线性映射矩阵, W k , R W_{k,R} Wk,R对应与key的positional encoding的线性映射矩阵
这样做的好处:
- 解决了在应用了Segment-level Recurrence之后,segment间位置编码冲突的问题
- 可以利用sinusoid 的inductive bias
sinusoid并不会受限于序列长度,即使是训练时从未遇到的序列长度仍能很好的处理,这也一定程度上体现了inductive bias[10]
Faster Evaluation
Vanilla transformer在评估时,每个segment只会向前移动一个token的位置,这样的速度很慢:


Results
- Transformer-XL学习的依赖项比RNNs长80%左右,比最初的transformer长450%,最初的transformer通常比RNNs具有更好的性能,但由于上下文的长度固定,不是远程依赖项建模的最佳选择
- 在评估语言建模任务时,ransformer-XL的速度比vanilla transformer快1800多倍,因为不需要重新计算(见Faster Evaluation部分)
- 由于有更好长距离依赖建模,Transformer-XL在长序列上具有更好的perplexity性能(更准确地预测样本);而且通过解决上下文碎片问题,它在短序列上也有更好的性能。
Reference
- Neural Machine Translation by Jointly Learning to Align and Translate
- 放弃幻想,全面拥抱Transformer:自然语言处理三大特征抽取器(CNN/RNN/TF)比较
- The Illustrated Transformer
- Overview - seq2seq TF seq2seq文档
- Sharp Nearby, Fuzzy Far Away: How Neural Language Models Use Context
- Transformer: A Novel Neural Network Architecture for Language Understanding
- Universal Transformers
- Convolutional Sequence to Sequence Learning
- The Importance of Being Recurrent for Modeling Hierarchical Structure
- 如何理解Inductive bias?
- Adaptive Computation Time for Recurrent Neural Networks
- 什么是图灵完备? - RanC的回答 - 知乎
- 模型汇总24 - 深度学习中Attention Mechanism详细介绍:原理、分类及应用
- Massive Exploration of Neural Machine Translation Architectures
- 碎碎念:Transformer的细枝末节
- Transform详解(超详细) Attention is all you need论文
- 【模型解读】resnet中的残差连接,你确定真的看懂了?
- Character-Level Language Modeling with Deeper Self-Attention
- Transformer-XL: Unleashing the Potential of Attention Models
- Self-Attention with Relative Position Representations
- MUSIC TRANSFORMER: GENERATING MUSIC WITH LONG-TERM STRUCTURE
- [NLP] 相对位置编码(二) Relative Positional Encodings - Transformer-XL