2020年春季学期信号与系统课程作业参考答案-第十三次作业

※ 第一题
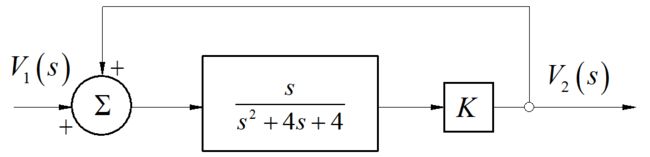
如下图所示的反馈系统,回答以下各列问题:
(1)写出系统的传递函数: H ( s ) = V 2 ( s ) V 1 ( s ) H\left( s \right) = {{V_2 \left( s \right)} \over {V_1 \left( s \right)}}\,\,\,\,\,\,\,\, H(s)=V1(s)V2(s)
(2) K满足什么条件时系统稳定?
(3)在临界稳定条件下,系统的冲激响应 h ( t ) h\left( t \right) h(t)。
■ 求解:
(1)求解:
K s s 2 + 4 s + 4 [ V 1 ( s ) + V 2 ( s ) ] = V 2 ( s ) {{Ks} \over {s^2 + 4s + 4}}\left[ {V_1 \left( s \right) + V_2 \left( s \right)} \right] = V_2 \left( s \right) s2+4s+4Ks[V1(s)+V2(s)]=V2(s) H ( s ) = V 2 ( s ) V 1 ( s ) = K s s 2 + ( 4 − K ) s + 4 H\left( s \right) = {{V_2 \left( s \right)} \over {V_1 \left( s \right)}} = {{Ks} \over {s^2 + \left( {4 - K} \right)s + 4}} H(s)=V1(s)V2(s)=s2+(4−K)s+4Ks
(2)求解:
p 1 , 2 = ( K − 4 ) ± j 16 − ( 4 − K ) 2 2 p_{1,2} = {{\left( {K - 4} \right) \pm j\sqrt {16 - \left( {4 - K} \right)^2 } } \over 2} p1,2=2(K−4)±j16−(4−K)2 K − 4 2 < 0 ⇒ K < 4 {{K - 4} \over 2} < 0\,\,\, \Rightarrow \,\,K < 4 2K−4<0⇒K<4
(3)求解:
K = 4 , H ( s ) = 4 s s 2 + 4 K = 4,\,\,\,H\left( s \right) = {{4s} \over {s^2 + 4}} K=4,H(s)=s2+44s h ( t ) = 4 cos ( 2 t ) ⋅ u ( t ) h\left( t \right) = 4\cos \left( {2t} \right) \cdot u\left( t \right) h(t)=4cos(2t)⋅u(t)
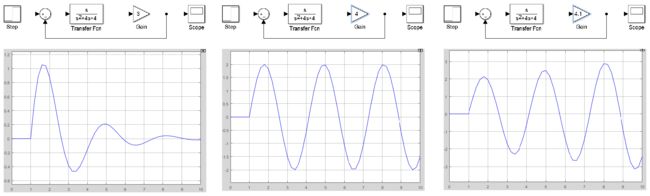
▲ 使用MATLAB中的SIMULINK可以来仿真在上述各个K值参数下系统的单位阶跃响应:
※ 第二题
如下图所示的反馈系统,回答以下各列问题:
(1)写出系统传递函数: H ( z ) = Y ( z ) X ( z ) H\left( z \right) = {{Y\left( z \right)} \over {X\left( z \right)}} H(z)=X(z)Y(z)
(2)K满足什么条件的时候系统稳定?
■ 求解:
(1)解答:
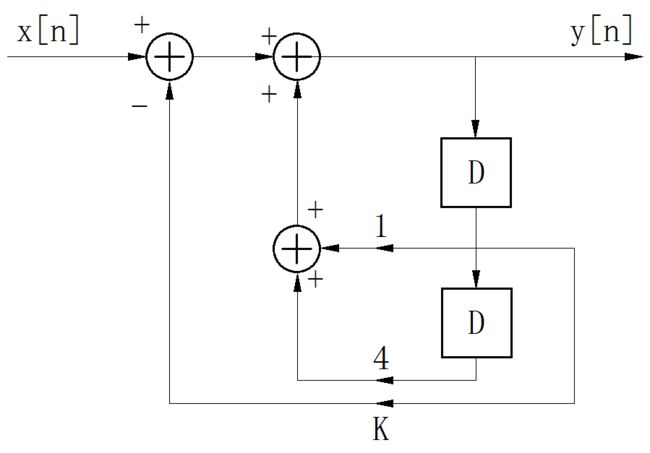
y [ n ] = y [ n − 1 ] + 4 y [ n − 2 ] − k ⋅ y [ n − 1 ] + x [ n ] y\left[ n \right] = y\left[ {n - 1} \right] + 4y\left[ {n - 2} \right] - k \cdot y\left[ {n - 1} \right] + x\left[ n \right] y[n]=y[n−1]+4y[n−2]−k⋅y[n−1]+x[n] Y ( z ) = ( 1 − k ) z − 1 Y ( z ) + 4 z − 2 Y ( z ) + X ( z ) Y\left( z \right) = \left( {1 - k} \right)z^{ - 1} Y\left( z \right) + 4z^{ - 2} Y\left( z \right) + X\left( z \right) Y(z)=(1−k)z−1Y(z)+4z−2Y(z)+X(z) H ( z ) = Y ( z ) X ( z ) = z 2 z 2 + ( K − 1 ) z − 4 H\left( z \right) = {{Y\left( z \right)} \over {X\left( z \right)}} = {{z^2 } \over {z^2 + \left( {K - 1} \right)z - 4}} H(z)=X(z)Y(z)=z2+(K−1)z−4z2
(2)解答:
Δ = ( K − 1 ) 2 + 16 > 0 , z 1 z 2 = − 4 \Delta = \left( {K - 1} \right)^2 + 16 > 0,\,\,z_1 z_2 = - 4 Δ=(K−1)2+16>0,z1z2=−4
根据 z 1 , z 2 z_1 ,z_2 z1,z2的乘积等于-4,说明在任何时候,两者中至少有一个绝对值大于1,所以系统总是不能够稳定的。
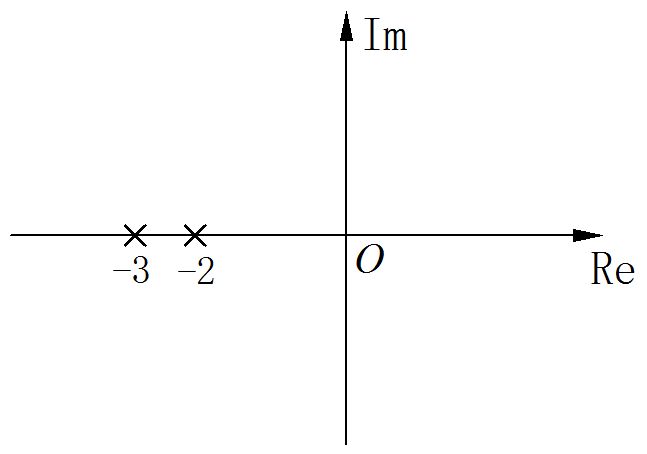
※ 第三题
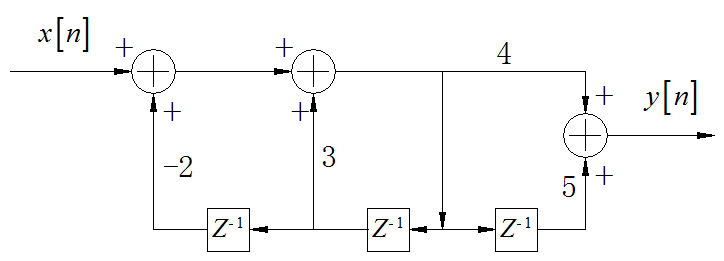
离散时间系统如下图所示:
(1) 求该系统的传递函数 H ( z ) H\left( z \right) H(z);
(2) 设系统的机理为: x [ n ] = [ ( − 1 ) n + ( − 2 ) n ] ⋅ u [ n ] x\left[ n \right] = \left[ {\left( { - 1} \right)^n + \left( { - 2} \right)^n } \right] \cdot u\left[ n \right] x[n]=[(−1)n+(−2)n]⋅u[n]
用z变换求该系统的零状态响应;
(3) 已知 x [ n ] = δ [ n ] , y [ 0 ] = 1 , y [ − 1 ] = − 1 x\left[ n \right] = \delta \left[ n \right],\,\,y\left[ 0 \right] = 1,\,\,y\left[ { - 1} \right] = - 1 x[n]=δ[n],y[0]=1,y[−1]=−1
利用z变换求该系统的零输入响应。
■ 求解:
(1)解答:
通过设立中间变量 w [ n ] w\left[ n \right] w[n]建立两个方程:
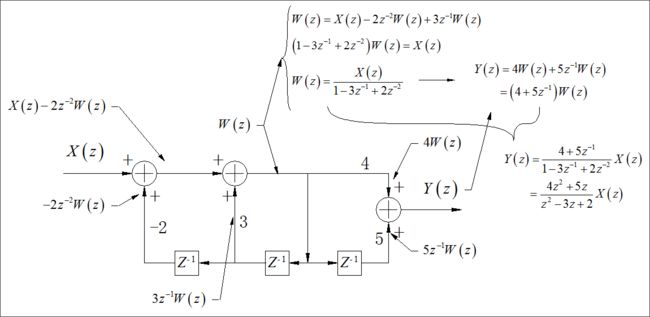
系统的传递函数为:
Y ( z ) X ( z ) = 4 + 5 z − 1 1 − 3 z − 1 + 2 z − 2 = 4 z 2 + 5 z z 2 − 3 z + 2 {{Y\left( z \right)} \over {X\left( z \right)}} = {{4 + 5z^{ - 1} } \over {1 - 3z^{ - 1} + 2z^{ - 2} }}\, = {{4z^2 + 5z} \over {z^2 - 3z + 2}} X(z)Y(z)=1−3z−1+2z−24+5z−1=z2−3z+24z2+5z
(2)解答:
系统输入信号的z变换:
X ( z ) = z z + 1 + z z + 2 X\left( z \right) = {z \over {z + 1}} + {z \over {z + 2}} X(z)=z+1z+z+2z
Y ( z ) = H ( z ) ⋅ X ( z ) = 4 z 2 + 5 z z 2 − 3 z + 2 ⋅ ( z z + 1 + z z + 2 ) Y\left( z \right) = H\left( z \right) \cdot X\left( z \right) = {{4z^2 + 5z} \over {z^2 - 3z + 2}} \cdot \left( {{z \over {z + 1}} + {z \over {z + 2}}} \right) Y(z)=H(z)⋅X(z)=z2−3z+24z2+5z⋅(z+1z+z+2z) = 8 z 4 + 22 z 3 + 15 z 2 z 4 − 5 z 2 + 4 = z 2 ( 2 z + 3 ) ( 4 z + 5 ) ( z − 1 ) ( z − 2 ) ( z + 2 ) ( z + 1 ) = {{8z^4 + 22z^3 + 15z^2 } \over {z^4 - 5z^2 + 4}} = {{z^2 \left( {2z + 3} \right)\left( {4z + 5} \right)} \over {\left( {z - 1} \right)\left( {z - 2} \right)\left( {z + 2} \right)\left( {z + 1} \right)}} =z4−5z2+48z4+22z3+15z2=(z−1)(z−2)(z+2)(z+1)z2(2z+3)(4z+5)
= − 15 2 z z − 1 + 15 1 6 z z − 2 + 1 2 z z + 2 + − 1 6 z z + 1 = {{ - {{15} \over 2}z} \over {z - 1}} + {{15{1 \over 6}z} \over {z - 2}} + {{{1 \over 2}z} \over {z + 2}} + {{ - {1 \over 6}z} \over {z + 1}} =z−1−215z+z−21561z+z+221z+z+1−61z
>>iztrans(ans)'
ans=(-2)^n/2 -(-1)^n/6 +(91*2^n)/6 -15/2
系统的零状态响应为:
y [ n ] = − 15 2 + 1 2 ( − 2 ) n − 1 6 ( − 1 ) n + 91 6 ⋅ 2 n , n ≥ 0 y\left[ n \right] = - {{15} \over 2} + {1 \over 2}\left( { - 2} \right)^n - {1 \over 6}\left( { - 1} \right)^n + {{91} \over 6} \cdot 2^n ,\,\,\,\,n \ge 0 y[n]=−215+21(−2)n−61(−1)n+691⋅2n,n≥0
(3)解答:
根据系统的传递函数可以化简为: Y ( z ) = 4 + 5 z − 1 1 − 3 z − 1 + 2 z − 2 Y\left( z \right) = {{4 + 5z^{ - 1} } \over {1 - 3z^{ - 1} + 2z^{ - 2} }} Y(z)=1−3z−1+2z−24+5z−1
它对应的系统差分方程为: y [ n ] − 3 y [ n − 1 ] + 2 y [ n − 2 ] = 4 x [ n ] + 5 x [ n − 1 ] y\left[ n \right] - 3y\left[ {n - 1} \right] + 2y\left[ {n - 2} \right] = 4x\left[ n \right] + 5x\left[ {n - 1} \right] y[n]−3y[n−1]+2y[n−2]=4x[n]+5x[n−1]
写出对应的后向迭代方程:
2 y [ n − 2 ] = 4 x [ n ] + 5 x [ n − 1 ] − y [ n ] + 3 y [ n − 1 ] 2y\left[ {n - 2} \right] = 4x\left[ n \right] + 5x\left[ {n - 1} \right] - y\left[ n \right] + 3y\left[ {n - 1} \right] 2y[n−2]=4x[n]+5x[n−1]−y[n]+3y[n−1]
根据已知条件,可以求出: 2 y [ − 2 ] = 4 x [ 0 ] + 5 x [ − 1 ] − y [ 0 ] + 3 y [ − 1 ] 2y\left[ { - 2} \right] = 4x\left[ 0 \right] + 5x\left[ { - 1} \right] - y\left[ 0 \right] + 3y\left[ { - 1} \right] 2y[−2]=4x[0]+5x[−1]−y[0]+3y[−1]
y [ − 2 ] = 4 x [ 0 ] + 5 x [ − 1 ] − y [ 0 ] + 3 y [ − 1 ] 2 = 4 + 5 ⋅ 0 − 1 + 3 ⋅ ( − 1 ) 2 = 0 y\left[ { - 2} \right] = {{4x\left[ 0 \right] + 5x\left[ { - 1} \right] - y\left[ 0 \right] + 3y\left[ { - 1} \right]} \over 2}\, = {{4 + 5 \cdot 0 - 1 + 3 \cdot \left( { - 1} \right)} \over 2} = 0 y[−2]=24x[0]+5x[−1]−y[0]+3y[−1]=24+5⋅0−1+3⋅(−1)=0
Y ( z ) − 3 { z − 1 Y ( z ) + y [ − 1 ] } + 2 { z − 2 Y ( z ) + y [ − 2 ] + z − 1 y [ − 1 ] } = 4 X ( z ) + 5 { z − 1 X ( z ) − x [ − 1 ] } Y\left( z \right) - 3\left\{ {z^{ - 1} Y\left( z \right) + y\left[ { - 1} \right]} \right\} + 2\left\{ {z^{ - 2} Y\left( z \right) + y\left[ { - 2} \right] + z^{ - 1} y\left[ { - 1} \right]} \right\}\, = 4X\left( z \right) + 5\left\{ {z^{ - 1} X\left( z \right) - x\left[ { - 1} \right]} \right\} Y(z)−3{z−1Y(z)+y[−1]}+2{z−2Y(z)+y[−2]+z−1y[−1]}=4X(z)+5{z−1X(z)−x[−1]} ( 1 − 3 z − 1 + 2 z − 2 ) Y ( z ) − 3 y [ − 1 ] + 2 y [ − 2 ] + 2 z − 1 y [ − 1 ] = ( 4 + 5 z − 1 ) X ( z ) − 5 x [ − 1 ] \left( {1 - 3z^{ - 1} + 2z^{ - 2} } \right)Y\left( z \right) - 3y\left[ { - 1} \right] + 2y\left[ { - 2} \right] + 2z^{ - 1} y\left[ { - 1} \right]\, = \left( {4 + 5z^{ - 1} } \right)X\left( z \right) - 5x\left[ { - 1} \right] (1−3z−1+2z−2)Y(z)−3y[−1]+2y[−2]+2z−1y[−1]=(4+5z−1)X(z)−5x[−1] Y ( z ) = ( 4 + 5 z − 1 ) X ( z ) − 5 x [ − 1 ] + ( 3 − 2 z − 1 ) y [ − 1 ] + 2 y [ − 2 ] 1 − 3 z − 1 + 2 z − 2 Y\left( z \right) = {{\left( {4 + 5z^{ - 1} } \right)X\left( z \right) - 5x\left[ { - 1} \right] + \left( {3 - 2z^{ - 1} } \right)y\left[ { - 1} \right] + 2y\left[ { - 2} \right]} \over {1 - 3z^{ - 1} + 2z^{ - 2} }} Y(z)=1−3z−1+2z−2(4+5z−1)X(z)−5x[−1]+(3−2z−1)y[−1]+2y[−2]
系统的零输入响应:
Y z i ( z ) = ( 3 − 2 z − 1 ) ( − 1 ) 1 − 3 z − 1 + 2 z − 2 = z ( 3 z − 2 ) ( z − 1 ) ( z − 2 ) = − z z − 1 + 4 z z − 2 Y_{zi} \left( z \right) = {{\left( {3 - 2z^{ - 1} } \right)\left( { - 1} \right)} \over {1 - 3z^{ - 1} + 2z^{ - 2} }} = {{z\left( {3z - 2} \right)} \over {\left( {z - 1} \right)\left( {z - 2} \right)}} = {{ - z} \over {z - 1}} + {{4z} \over {z - 2}} Yzi(z)=1−3z−1+2z−2(3−2z−1)(−1)=(z−1)(z−2)z(3z−2)=z−1−z+z−24z
系统的零状态响应:
Y z s ( z ) = ( 4 + 5 z − 1 ) ⋅ X ( z ) 1 − 3 z − 1 + 2 z − 2 Y_{zs} \left( z \right) = {{\left( {4 + 5z^{ - 1} } \right) \cdot X\left( z \right)} \over {1 - 3z^{ - 1} + 2z^{ - 2} }} Yzs(z)=1−3z−1+2z−2(4+5z−1)⋅X(z)
对 Y z i ( z ) Y_{zi} \left( z \right) Yzi(z)进行z反变换,可以得到系统的零输入响应: y z i [ n ] = − 1 + 4 ⋅ 2 n , n ≥ 0 y_{zi} \left[ n \right] = - 1 + 4 \cdot 2^n ,\,\,\,\,n \ge 0 yzi[n]=−1+4⋅2n,n≥0
※ 第四题
已知离散时间因果系统的差分方程为:
(1) y [ n ] = 0.14 x [ n ] + 0.14 x [ n − 1 ] + 1.02 y [ n − 1 ] y\left[ n \right] = 0.14x\left[ n \right] + 0.14x\left[ {n - 1} \right] + 1.02y\left[ {n - 1} \right] y[n]=0.14x[n]+0.14x[n−1]+1.02y[n−1]
(2) y [ n ] = 0.5 x [ n ] − 0.3 x [ n − 2 ] − 2 y [ n − 1 ] − y [ n − 2 ] y\left[ n \right] = 0.5x\left[ n \right] - 0.3x\left[ {n - 2} \right] - 2y\left[ {n - 1} \right] - y\left[ {n - 2} \right] y[n]=0.5x[n]−0.3x[n−2]−2y[n−1]−y[n−2]
通过传递函数的几点位置判断系统的稳定性。
■ 求解:
(1)求解:
y [ n ] = 0.14 x [ n ] + 0.14 x [ n − 1 ] + 1.02 y [ n − 1 ] y\left[ n \right] = 0.14x\left[ n \right] + 0.14x\left[ {n - 1} \right] + 1.02y\left[ {n - 1} \right] y[n]=0.14x[n]+0.14x[n−1]+1.02y[n−1]
系统的传递函数为: Y ( z ) = 0.14 + 0.14 z − 1 1 − 1.02 z − 1 = 0.14 ( z + 1 ) z − 1.02 Y\left( z \right) = {{0.14 + 0.14z^{ - 1} } \over {1 - 1.02z^{ - 1} }} = {{0.14\left( {z + 1} \right)} \over {z - 1.02}} Y(z)=1−1.02z−10.14+0.14z−1=z−1.020.14(z+1)
它具有一个单重实根: p 1 = 1.02 > 1 p_1 = 1.02 > 1 p1=1.02>1
所以系统 不稳定 。
>>iztrans(0.14*(z+1)/(z-1.02))'
ans=(707*(51/50)^n)/2550 -(7*kroneckerDelta(n,0))/51
y [ n ] = 707 ( 51 50 ) n 2550 − 7 δ [ n ] 51 y\left[ n \right] = {{707\left( {{{51} \over {50}}} \right)^n } \over {2550}} - {{7\delta \left[ n \right]} \over {51}} y[n]=2550707(5051)n−517δ[n]
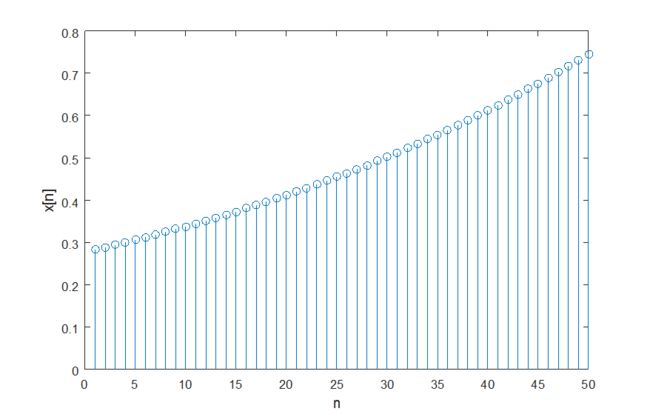
▲ 系统仿真结果输出
(2)求解:
y [ n ] = 0.5 x [ n ] − 0.3 x [ n − 2 ] − 2 y [ n − 1 ] − y [ n − 2 ] y\left[ n \right] = 0.5x\left[ n \right] - 0.3x\left[ {n - 2} \right] - 2y\left[ {n - 1} \right] - y\left[ {n - 2} \right] y[n]=0.5x[n]−0.3x[n−2]−2y[n−1]−y[n−2]
系统的传递函数为: Y ( z ) = 0.5 − 0.3 z − 2 1 + 2 z − 1 + z − 2 = z ( 0.5 z − 0.3 ) ( z + 1 ) 2 Y\left( z \right) = {{0.5 - 0.3z^{ - 2} } \over {1 + 2z^{ - 1} + z^{ - 2} }} = {{z\left( {0.5z - 0.3} \right)} \over {\left( {z + 1} \right)^2 }} Y(z)=1+2z−1+z−20.5−0.3z−2=(z+1)2z(0.5z−0.3)
具有双重实根: p 1 , 2 = − 1 p_{1,2} = - 1 p1,2=−1,所以系统 不稳定 。
>>iztrans(z*(0.5*z-0.3)/(z+1)^2)'
ans=(13*(-1)^n)/10 +(4*(-1)^n*(n-1))/5
y [ n ] = 1.3 ( − 1 ) n + 0.8 ( − 1 ) n ⋅ ( n − 1 ) , n ≥ 0 y[n] = 1.3\left( { - 1} \right)^n + 0.8\left( { - 1} \right)^n \cdot \left( {n - 1} \right),\,\,\,\,n \ge 0 y[n]=1.3(−1)n+0.8(−1)n⋅(n−1),n≥0
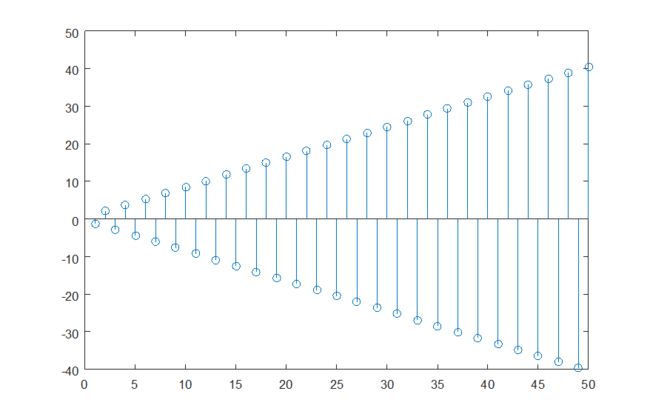
▲ MATLAB仿真输出结果
※ 第五题
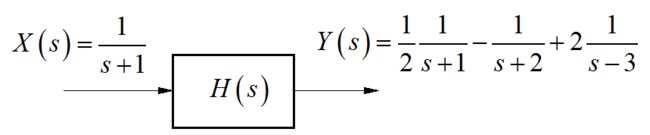
对于线性时不变系统施加激励信号: x ( t ) = e − t u ( t ) x\left( t \right) = e^{ - t} u\left( t \right) x(t)=e−tu(t)
系统的零状态输出为: y ( t ) = ( 1 2 e − t − e − 2 t + 2 e 3 t ) u ( t ) y\left( t \right) = \left( {{1 \over 2}e^{ - t} - e^{ - 2t} + 2e^{3t} } \right)u\left( t \right) y(t)=(21e−t−e−2t+2e3t)u(t)
求该系统的系统函数 H ( s ) H\left( s \right) H(s),单位脉冲响应 h ( t ) h\left( t \right) h(t)。
■ 求解:
将系统的零状态输入输出信号进行Laplace变换:
系统函数为:
H ( s ) = Y ( s ) X ( s ) = 1 2 ( s + 1 ) − 1 s + 2 + 2 s − 3 1 s + 1 H\left( s \right) = {{Y\left( s \right)} \over {X\left( s \right)}} = {{{1 \over {2\left( {s + 1} \right)}} - {1 \over {s + 2}} + {2 \over {s - 3}}} \over {{1 \over {s + 1}}}} H(s)=X(s)Y(s)=s+112(s+1)1−s+21+s−32 = 1 2 − s + 1 s + 2 + 2 ( s + 1 ) s − 3 = {1 \over 2} - {{s + 1} \over {s + 2}} + {{2\left( {s + 1} \right)} \over {s - 3}} =21−s+2s+1+s−32(s+1) = 3 2 + 1 s + 2 + 8 s − 3 = {3 \over 2} + {1 \over {s + 2}} + {8 \over {s - 3}} =23+s+21+s−38
将系统函数进行Laplace反变换,得到系统的单位脉冲响应 h ( t ) h\left( t \right) h(t): h ( t ) = 3 2 δ ( t ) + e − 2 t + 8 e 3 t , t ≥ 0 h\left( t \right) = {3 \over 2}\delta \left( t \right) + e^{ - 2t} + 8e^{3t} ,\,\,\,\,t \ge 0 h(t)=23δ(t)+e−2t+8e3t,t≥0
※ 第六题
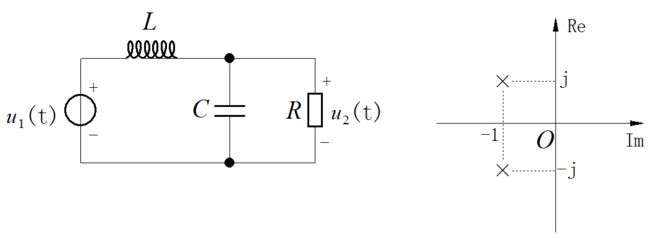
已知电路如下面左图所示,传递函数的零极点如下面右图所示,且 H ( 0 ) = 1 H\left( 0 \right) = 1 H(0)=1。
求:R,L,C的值。
■ 求解:
将电路换成s域元器件模型:
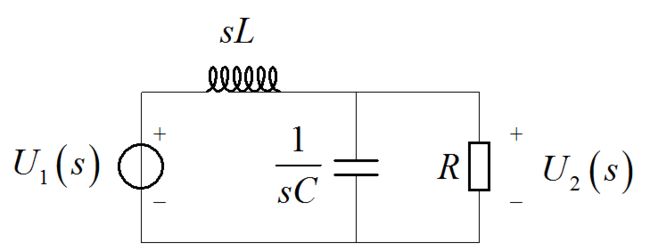
H ( s ) = U 2 ( s ) U 1 ( s ) = R s R C + 1 s L + R s R C + 1 = R R L C s 2 + s L + R = 1 L C s 2 + 1 R C s + 1 L C H\left( s \right) = {{U_2 \left( s \right)} \over {U_1 \left( s \right)}} = {{{R \over {sRC + 1}}} \over {sL + {R \over {sRC + 1}}}}\, = {R \over {RLCs^2 + sL + R}}\, = {{{1 \over {LC}}} \over {s^2 + {1 \over {RC}}s + {1 \over {LC}}}} H(s)=U1(s)U2(s)=sL+sRC+1RsRC+1R=RLCs2+sL+RR=s2+RC1s+LC1LC1
根据系统零极点的分布 p 1 , 2 = − 1 ± j p_{1,2} = - 1 \pm j p1,2=−1±j,可以知道系统的传递函数为: H ( s ) = K ( s + 1 − j ) ( s + 1 + j ) = K s 2 + 2 s + 2 H\left( s \right) = {K \over {\left( {s + 1 - j} \right)\left( {s + 1 + j} \right)}} = {K \over {s^2 + 2s + 2}} H(s)=(s+1−j)(s+1+j)K=s2+2s+2K
根据 H ( 0 ) H\left( 0 \right) H(0)的取值,可以求出K值: H ( 0 ) = K 2 = 1 , K = 2 H\left( 0 \right) = {K \over 2} = 1,\,\,\,\,K = 2 H(0)=2K=1,K=2
所以系统函数为:
H ( s ) = 2 s 2 + 2 s + 2 H\left( s \right) = {2 \over {s^2 + 2s + 2}} H(s)=s2+2s+22
对比电路传递函数,可得:
1 L C = 2 , 1 R C = 2 , 1 L C = 2 {1 \over {LC}} = 2,\,\,\,{1 \over {RC}} = 2,\,\,{1 \over {LC}} = 2 LC1=2,RC1=2,LC1=2 L = R , C = 1 2 R L = R,\,\,\,C = {1 \over {2R}} L=R,C=2R1
由于只能有两个独立的方程,所以只能假设气氛中一个元器件的取值。在这里假设电阻 R = 1 Ω R = 1\Omega R=1Ω,那么其他两个元器件的取值便可以计算出来: L = R = 1 H , C = 1 / 2 R = 0.5 F L = R = 1H,\,\,\,\,C = 1/2R = 0.5F L=R=1H,C=1/2R=0.5F
※ 第七题
下列z变换中,哪些是对应的因果系统的传统函数?
(1) ( 1 − z − 1 ) 2 1 − 1 2 z − 1 {{\left( {1 - z^{ - 1} } \right)^2 } \over {1 - {1 \over 2}z^{ - 1} }} 1−21z−1(1−z−1)2
(2) ( z − 1 ) 2 z − 1 2 {{\left( {z - 1} \right)^2 } \over {z - {1 \over 2}}} z−21(z−1)2
(3)
( z − 1 6 ) 7 ( z − 1 2 ) 6 {{\left( {z - {1 \over 6}} \right)^7 } \over {\left( {z - {1 \over 2}} \right)^6 }} (z−21)6(z−61)7
■ 求解:
(1)求解: 分子的多项式的阶次等于分母的多项式的阶次,分式展开后不存在z的正幂次项,收敛域包括有∞,系统为因果系统。
(2)求解: 分子的多项式的阶次高于分母的多项式的阶次,分式展开后存在z的正幂次项,收敛域不包括有∞,系统为 非因果系统 。
(3)求解: 分子的多项式的阶次高于分母的多项式的阶次,分式展开后存在z的正幂次项,收敛域不包括有∞,系统为 非因果系统 。
※ 第八题
因果、稳定、LTI系统的传递函数为 H ( s ) H\left( s \right) H(s)。该系统的输入为: x ( t ) = δ ( t ) + e s 0 t + x 1 ( t ) x\left( t \right) = \delta \left( t \right) + e^{s_0 t} + x_1 \left( t \right) x(t)=δ(t)+es0t+x1(t)
其中 x 1 ( t ) x_1 \left( t \right) x1(t)未知, s 0 s_0 s0是复数常数。
由 x ( t ) x\left( t \right) x(t)产生的输出信号为: y ( t ) = δ ( t ) − 6 e − t u ( t ) − 1 2 e 4 t cos 3 t − 3 2 e 4 t sin 3 t y\left( t \right) = \delta \left( t \right) - 6e^{ - t} u\left( t \right) - {1 \over 2}e^{4t} \cos 3t - {3 \over 2}e^{4t} \sin 3t y(t)=δ(t)−6e−tu(t)−21e4tcos3t−23e4tsin3t
求符合上述条件的的传递函数 H ( s ) H\left( s \right) H(s)。
■ 求解:
将 y ( t ) y\left( t \right) y(t)进行Laplace变换:
Y ( s ) = 1 − 6 s + 1 + 1 2 ⋅ s + 5 s 2 − 8 s + 25 Y\left( s \right) = 1 - {6 \over {s + 1}} + {1 \over 2} \cdot {{s + 5} \over {s^2 - 8s + 25}} Y(s)=1−s+16+21⋅s2−8s+25s+5 = 1 − 6 s + 1 + 1 4 ( 1 − 3 j s − 4 − 3 j + 1 + 3 j s − 4 + 3 j ) = 1 - {6 \over {s + 1}} + {1 \over 4}\left( {{{1 - 3j} \over {s - 4 - 3j}} + {{1 + 3j} \over {s - 4 + 3j}}} \right) =1−s+16+41(s−4−3j1−3j+s−4+3j1+3j)
= s 3 − 13.5 s 2 + 62 s − 127.5 s 3 − 7 s 2 + 17 s + 25 = {{s^3 - 13.5s^2 + 62s - 127.5} \over {s^3 - 7s^2 + 17s + 25}} =s3−7s2+17s+25s3−13.5s2+62s−127.5
= s − 7.5 s + 1 ⋅ s 2 − 6 s + 17 s 2 − 8 s + 25 = {{s - 7.5} \over {s + 1}} \cdot {{s^2 - 6s + 17} \over {s^2 - 8s + 25}} =s+1s−7.5⋅s2−8s+25s2−6s+17
>>laplace(dirac(t)-6*exp(-t)-(exp(4*t)*(cos(3*t)+3*sin(3*t)))/2)'
ans=1 -6/(s+1)-9/(2*((s-4)^2 +9))-(s-4)/(2*((s-4)^2 +9)
>>partfrac((m+5)/(2*m^2-16*m+50),m,'FactorMode','full')'
ans=(1/4 -3i/4)/(m-4 -3i)+(1/4 +3i/4)/(m-4 +3i)
由于 x ( t ) x\left( t \right) x(t)是实数函数,所以 x 1 ( t ) x_1 \left( t \right) x1(t)应该包含 e s 0 t e^{s_0 t} es0t的共轭函数 e s 0 ∗ t e^{s_0^* t} es0∗t,所以: X ( s ) = 1 + 1 s − s 0 + 1 s − s 0 ∗ X\left( s \right) = 1 + {1 \over {s - s_0 }} + {1 \over {s - s_0^* }} X(s)=1+s−s01+s−s0∗1
对比LTI输出信号中的表达式,可以知道: s 0 = 4 + 3 j s_0 = 4 + 3j s0=4+3j。 X ( s ) = 1 + 2 s − 8 s 2 − 8 s + 25 = s 2 − 6 s + 17 s 2 − 8 s + 25 X\left( s \right) = 1 + {{2s - 8} \over {s^2 - 8s + 25}} = {{s^2 - 6s + 17} \over {s^2 - 8s + 25}} X(s)=1+s2−8s+252s−8=s2−8s+25s2−6s+17
由于 Y ( s ) = X ( s ) ⋅ H ( s ) Y\left( s \right) = X\left( s \right) \cdot H\left( s \right) Y(s)=X(s)⋅H(s),所以: H ( s ) = Y ( s ) X ( s ) = s − 7.5 s + 1 H\left( s \right) = {{Y\left( s \right)} \over {X\left( s \right)}} = {{s - 7.5} \over {s + 1}} H(s)=X(s)Y(s)=s+1s−7.5
※ 第九题
因果、稳定、LTI系统的单位脉冲响应和有理系统函数分别是 h ( t ) h\left( t \right) h(t)与 H ( s ) H\left( s \right) H(s)。已知系统的输入为单位阶跃函数 u ( t ) u\left( t \right) u(t)时,系统输出为绝对可和。当输入为 t ⋅ u ( t ) t \cdot u\left( t \right) t⋅u(t)时,系统输出不是绝对可和。此外:
d 2 h ( t ) d t 2 + 2 d h ( t ) d t + 2 h ( t ) {{d^2 h\left( t \right)} \over {dt^2 }} + 2{{dh\left( t \right)} \over {dt}} + 2h\left( t \right) dt2d2h(t)+2dtdh(t)+2h(t)
是有限长信号。 H ( 1 ) = 0.2 , H ( s ) H\left( 1 \right) = 0.2,\,\,\,\,\,H\left( s \right) H(1)=0.2,H(s)在无穷远点只有一个零点。
求系统的传递函数 H ( s ) H\left( s \right) H(s),给出收敛域。试讨论各个已知条件的作用。
■ 求解:
-
根据系统是因果、稳定、LTI系统可知, 系统的有理系统函数的极点都位于s平面 左半平面。
-
根据系统在u(t)的作用下,系统的输出为 绝对可和,表明: 1 s H ( s ) {1 \over s}H\left( s \right) s1H(s)收敛域包含虚轴,即 1 s H ( s ) {1 \over s}H\left( s \right) s1H(s)没有 s = 0 s = 0 s=0处的极点,因此 H ( s ) H\left( s \right) H(s)至少包含一个 s = 0 s = 0 s=0的零点。
-
根据系统在 t ⋅ u ( t ) t \cdot u\left( t \right) t⋅u(t)作用下,系统输出不是绝对可积,因此 H ( s ) H\left( s \right) H(s)在 s = 0 s = 0 s=0处的零点不超过两阶;系统函数可以写成: H ( s ) = s ⋅ A ( s ) B ( s ) H\left( s \right) = {{s \cdot A\left( s \right)} \over {B\left( s \right)}} H(s)=B(s)s⋅A(s)
-
根据 d 2 h ( t ) d t 2 + 2 d h ( t ) d t + 2 {{d^2 h\left( t \right)} \over {dt^2 }} + 2{{dh\left( t \right)} \over {dt}} + 2 dt2d2h(t)+2dtdh(t)+2为有限长,即 ( s 2 + 2 s + 2 ) H ( s ) \left( {s^2 + 2s + 2} \right)H\left( s \right) (s2+2s+2)H(s)不再包含任何极点,所以: B ( s ) = s 2 + 2 s + 2 B\left( s \right) = s^2 + 2s + 2 B(s)=s2+2s+2。
-
根据 H ( s ) H\left( s \right) H(s)在无穷远点只有一个一节零点,说明 H ( s ) H\left( s \right) H(s)的分子比分母的阶次小1。所以系统函数可以写成: H ( s ) = s ⋅ A s 2 + 2 s + 2 H\left( s \right) = {{s \cdot A} \over {s^2 + 2s + 2}} H(s)=s2+2s+2s⋅A
-
再由 H ( 1 ) = 0.2 H\left( 1 \right) = 0.2 H(1)=0.2,可以求得 A = 1 A = 1 A=1。最终,有理系统函数为: H ( s ) = s s 2 + 2 s + 2 H\left( s \right) = {s \over {s^2 + 2s + 2}} H(s)=s2+2s+2s
※ 第十题
用几何确定法粗略画出下列系统的幅频特性:
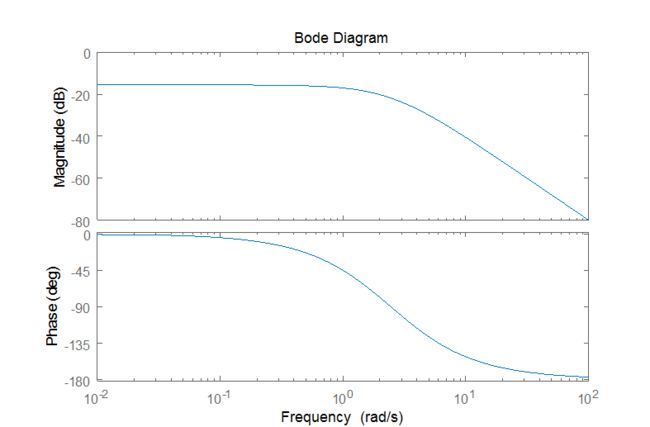
(1) H 1 ( s ) = 1 ( s + 2 ) ( s + 3 ) , R e [ s ] > − 2 H_1 \left( s \right) = {1 \over {\left( {s + 2} \right)\left( {s + 3} \right)}},\,\,{\mathop{\rm Re}\nolimits} \left[ s \right] > - 2 H1(s)=(s+2)(s+3)1,Re[s]>−2
(2) H 2 ( s ) = s 2 s 2 + 2 s + 1 , R e [ s ] > − 1 H_2 \left( s \right) = {{s^2 } \over {s^2 + 2s + 1}},\,\,\,{\mathop{\rm Re}\nolimits} \left[ s \right] > - 1 H2(s)=s2+2s+1s2,Re[s]>−1
(3) H 3 ( s ) = s 2 − s + 1 s 2 + s + 1 , R e [ s ] > − 1 2 H_3 \left( s \right) = {{s^2 - s + 1} \over {s^2 + s + 1}},\,\,\,{\mathop{\rm Re}\nolimits} \left[ s \right] > - {1 \over 2} H3(s)=s2+s+1s2−s+1,Re[s]>−21
■ 求解:
(1)求解:
H 1 ( s ) = 1 ( s + 2 ) ( s + 3 ) , R e [ s ] > − 2 H_1 \left( s \right) = {1 \over {\left( {s + 2} \right)\left( {s + 3} \right)}},\,\,{\mathop{\rm Re}\nolimits} \left[ s \right] > - 2 H1(s)=(s+2)(s+3)1,Re[s]>−2
bode(tf(zpk([],[-2,-3],1)))'
(2)求解:
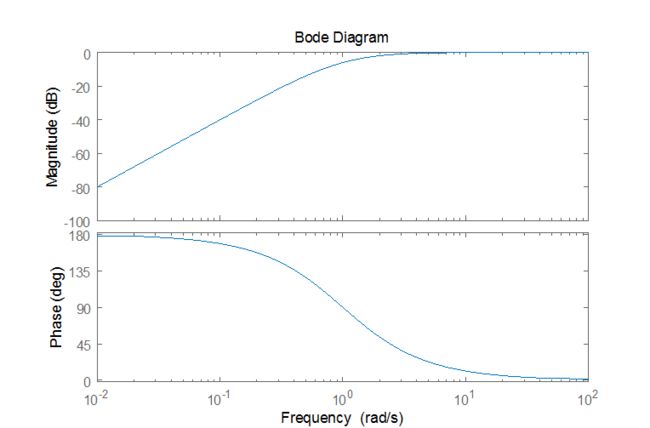
H 2 ( s ) = s 2 s 2 + 2 s + 1 , R e [ s ] > − 1 H_2 \left( s \right) = {{s^2 } \over {s^2 + 2s + 1}},\,\,\,{\mathop{\rm Re}\nolimits} \left[ s \right] > - 1 H2(s)=s2+2s+1s2,Re[s]>−1
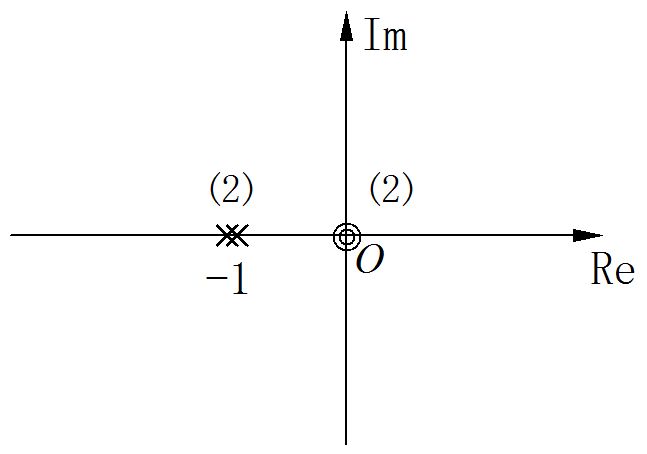
bode(tf(zpk([0,0],[-1,-1],1)))'
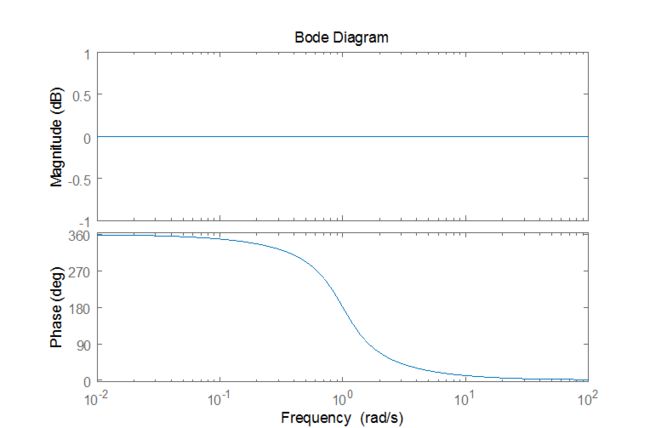
(3)求解:
H 3 ( s ) = s 2 − s + 1 s 2 + s + 1 , R e [ s ] > − 1 2 H_3 \left( s \right) = {{s^2 - s + 1} \over {s^2 + s + 1}},\,\,\,{\mathop{\rm Re}\nolimits} \left[ s \right] > - {1 \over 2} H3(s)=s2+s+1s2−s+1,Re[s]>−21
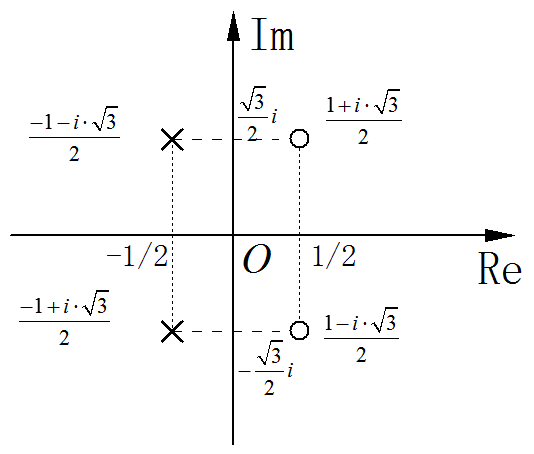
bode(tf([1,-1,1],[1,1,1]))'
※ 第十一题
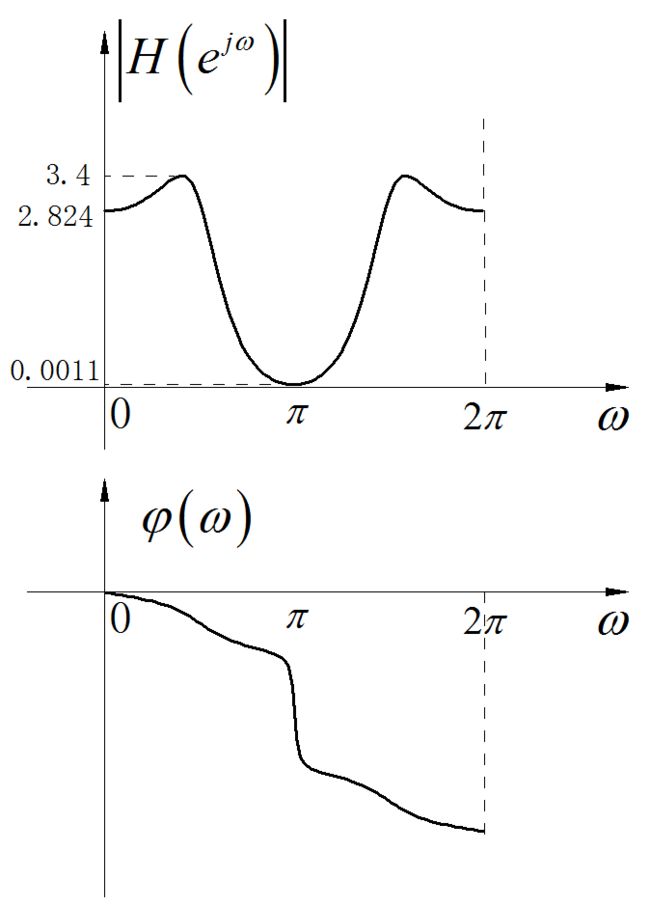
已知以下系统,用几何作图法粗略会出它们的幅频和相频特性。
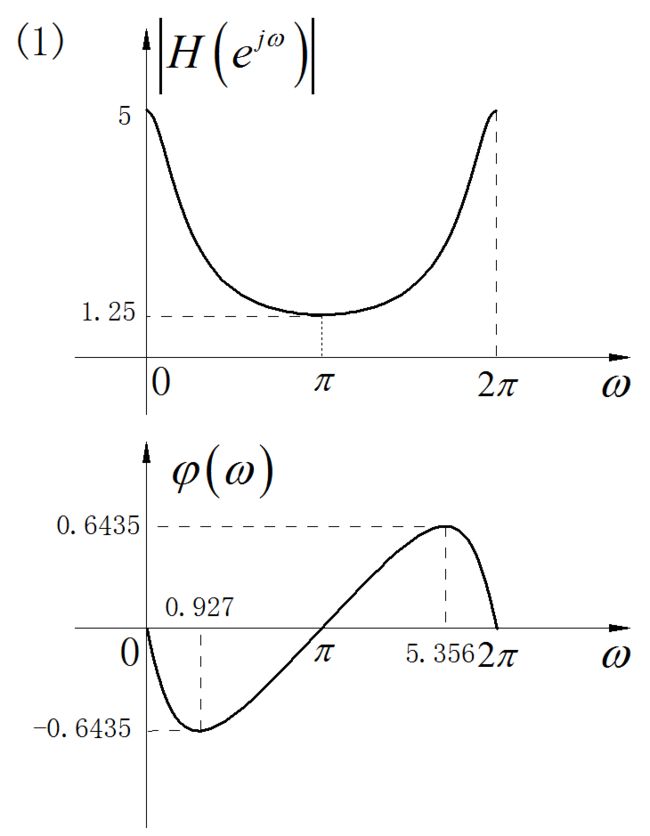
(1) H ( z ) = 2 z z − 0.6 H\left( z \right) = {{2z} \over {z - 0.6}}\;\;\;\;\; H(z)=z−0.62z
(2) H ( z ) = ( 0.96 + z − 1 ) 2 0.36 z − 2 + 1 H\left( z \right) = {{\left( {0.96 + z^{ - 1} } \right)^2 } \over {0.36z^{ - 2} + 1}}\;\;\;\;\; H(z)=0.36z−2+1(0.96+z−1)2
■ 求解:
(1)求解:
(2)求解: